一种智能化工业巡检机器人的制作方法
- 国知局
- 2024-07-08 10:49:55
本实用涉及工业巡检机器人,具体是一种智能化工业巡检机器人。
背景技术:
1、巡检机器人基于ocr和图像识别能力,能模拟专业的人工操作,在全站多级页面与资金交易全流程的各个场景进行点击、识别、检查等巡检操作,巡检机器人现在在工业、电力领域中运用广泛,常用于对厂区内各巡检点的设备及环境参数进行检测,并根据预定程序进行分析,例如中国专利公开了一种安全巡检工业机器人,(授权公告号cn219404275u),该专利技术安全巡检工业机器人通过箱体、升降柱、照明灯和保护罩的设置,当箱体在移动的时候可以将升降柱在竖柱的内部提拉一定的高度,有利于对摄像头本体的高度进行调节,将照明灯打开,照明灯可以在光线昏暗不足的区域对摄像头本体进行补光,起到的补光的作用,保护罩可以防止摄像头本体在使用的时候不会受到外界的碰撞而受损;
2、但是现有公开的智能化工业巡检机器人在实际应用时,还是存在一些缺陷需要改善,例如:
3、①摄像组件实时凸出于装置的外侧,不使用时灰尘粘附到摄像组件上,需要定期对摄像组件清洁,不利于使用的便捷性,容易误碰摄像组件,导致摄像组件损坏;
4、②通过转向轮进行机器人的转向,转弯直径较大,转向的灵活度较低。因此,本领域技术人员提供了一种智能化工业巡检机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用的目的是提供一种智能化工业巡检机器人,以解决上述背景技术中提出的问题。
2、本实用采取的技术方案具体如下:
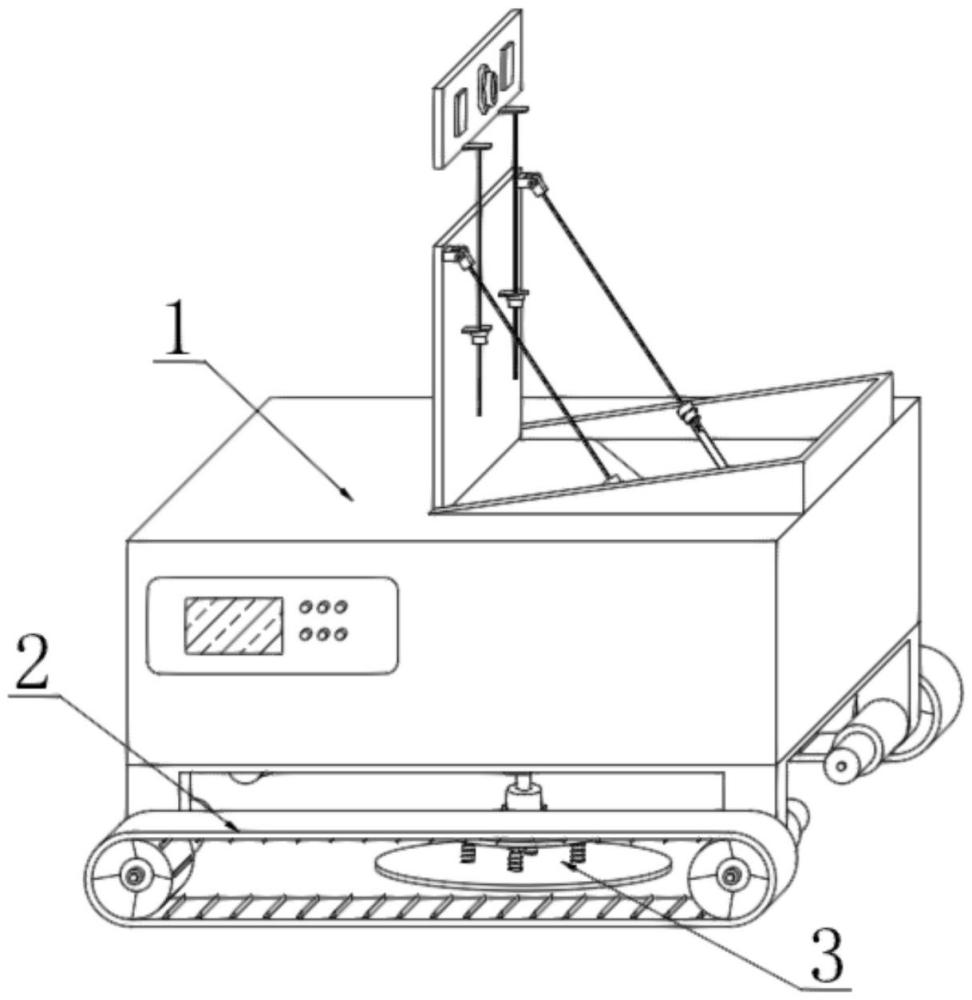
3、一种智能化工业巡检机器人,包括巡检构件、传动构件与转向构件,所述传动构件位于巡检构件的下侧位置处,所述转向构件位于传动构件的下侧位置处;
4、所述巡检构件包括控制箱,所述控制箱的一端设置有收纳槽,所述收纳槽的内部设置有外杆,所述外杆的上端设置有第一丝杆,所述收纳槽的上侧设置有防护罩,所述防护罩的一端设置有第一防护板,所述第一防护板的一侧设置有第一安装板,所述第一安装板的外端设置有第二丝杆,所述第二丝杆的上端设置有第二安装板,所述第二安装板的一侧设置有摄像组件。
5、作为本实用新型再进一步的方案:所述摄像组件的一侧安装有摄像头,所述摄像组件的一侧临近摄像头的位置处安装有照明灯,所述第一安装板的下侧位于第二丝杆的下端位置处安装有第一丝杆电机,所述外杆的上侧位于第一丝杆的下端位置处安装有第二丝杆电机。
6、作为本实用新型再进一步的方案:所述转向构件包括第三安装板,所述第三安装板的下侧安装有电动调节伸缩杆,所述电动调节伸缩杆的下端安装有转向电机,所述转向电机的下侧设置有转向板,所述转向板的下侧安装有弹簧,所述弹簧的下侧设置有压板,所述转向板的上侧一端位置处安装有第一方位传感器,所述第三安装板的下侧对应第一方位传感器的位置处安装有第二方位传感器,所述传动构件包括传动架,所述传动架的外侧设置有传动轮,所述传动轮的外侧设置有履带,所述传动架的内侧对应传动轮的位置处安装有传动电机。
7、作为本实用新型再进一步的方案:所述第一防护板转动于防护罩的内侧一端位置处,所述外杆的下端转动于收纳槽的内部位置处,所述第一丝杆的上端转动于第一防护板的上端位置处,所述第一丝杆的下端滑动于外杆的内部位置处。
8、作为本实用新型再进一步的方案:所述第二丝杆的下端滑动于第一安装板的外端位置处,所述摄像组件通过第二丝杆滑动于第一防护板的上侧位置处。
9、作为本实用新型再进一步的方案:所述第二丝杆通过第一丝杆电机滑动于第一安装板的外端位置处,所述第一丝杆的下端通过第二丝杆电机滑动于外杆的内部位置处。
10、作为本实用新型再进一步的方案:所述转向构件通过第三安装板固定于传动构件的下侧位置处,所述转向板通过转向电机转动于电动调节伸缩杆的下端位置处,所述传动轮通过传动电机转动于传动架的外侧位置处,所述履带通过传动轮转动于传动架的外侧位置处。
11、与现有技术相比,本实用新型的有益效果是:
12、一种智能化工业巡检机器人,通过外杆与第一丝杆启闭第一防护板与摄像组件,不使用时第一防护板与摄像组件位于防护罩的内侧,对摄像组件保护,使用时第一防护板与摄像组件转出防护罩,不影响巡检操作,减少摄像组件的清洁频率,有利于使用的便捷性,避免误碰摄像组件,导致摄像组件损坏;
13、一种智能化工业巡检机器人,通过转向构件对巡检机器人转向,减小转弯直径,提高转向的灵活度,通过转向构件检测转向方位,提高转向的精准度,智能化程度高。
技术特征:1.一种智能化工业巡检机器人,其特征在于,包括巡检构件(1)、传动构件(2)与转向构件(3),所述传动构件(2)位于巡检构件(1)的下侧位置处,所述转向构件(3)位于传动构件(2)的下侧位置处;
2.根据权利要求1所述的一种智能化工业巡检机器人,其特征在于,所述摄像组件(13)的一侧安装有摄像头(14),所述摄像组件(13)的一侧临近摄像头(14)的位置处安装有照明灯(15),所述第一安装板(10)的下侧位于第二丝杆(11)的下端位置处安装有第一丝杆电机(16),所述外杆(6)的上侧位于第一丝杆(7)的下端位置处安装有第二丝杆电机(17)。
3.根据权利要求1所述的一种智能化工业巡检机器人,其特征在于,所述转向构件(3)包括第三安装板(18),所述第三安装板(18)的下侧安装有电动调节伸缩杆(19),所述电动调节伸缩杆(19)的下端安装有转向电机(20),所述转向电机(20)的下侧设置有转向板(21),所述转向板(21)的下侧安装有弹簧(22),所述弹簧(22)的下侧设置有压板(23),所述转向板(21)的上侧一端位置处安装有第一方位传感器(24),所述第三安装板(18)的下侧对应第一方位传感器(24)的位置处安装有第二方位传感器(25),所述传动构件(2)包括传动架(26),所述传动架(26)的外侧设置有传动轮(27),所述传动轮(27)的外侧设置有履带(28),所述传动架(26)的内侧对应传动轮(27)的位置处安装有传动电机(29)。
4.根据权利要求1所述的一种智能化工业巡检机器人,其特征在于,所述第一防护板(8)转动于防护罩(9)的内侧一端位置处,所述外杆(6)的下端转动于收纳槽(5)的内部位置处,所述第一丝杆(7)的上端转动于第一防护板(8)的上端位置处,所述第一丝杆(7)的下端滑动于外杆(6)的内部位置处。
5.根据权利要求1所述的一种智能化工业巡检机器人,其特征在于,所述第二丝杆(11)的下端滑动于第一安装板(10)的外端位置处,所述摄像组件(13)通过第二丝杆(11)滑动于第一防护板(8)的上侧位置处。
6.根据权利要求2所述的一种智能化工业巡检机器人,其特征在于,所述第二丝杆(11)通过第一丝杆电机(16)滑动于第一安装板(10)的外端位置处,所述第一丝杆(7)的下端通过第二丝杆电机(17)滑动于外杆(6)的内部位置处。
7.根据权利要求3所述的一种智能化工业巡检机器人,其特征在于,所述转向构件(3)通过第三安装板(18)固定于传动构件(2)的下侧位置处,所述转向板(21)通过转向电机(20)转动于电动调节伸缩杆(19)的下端位置处,所述传动轮(27)通过传动电机(29)转动于传动架(26)的外侧位置处,所述履带(28)通过传动轮(27)转动于传动架(26)的外侧位置处。
技术总结本实用涉及工业巡检机器人技术领域,具体为一种智能化工业巡检机器人,包括巡检构件、传动构件与转向构件,所述巡检构件包括控制箱,所述控制箱的一端设置有收纳槽,所述收纳槽的内部设置有外杆,所述外杆的上端设置有第一丝杆,所述收纳槽的上侧设置有防护罩,所述防护罩的一端设置有第一防护板,所述第一防护板的一侧设置有第一安装板,所述第一安装板的外端设置有第二丝杆。通过外杆与第一丝杆启闭第一防护板与摄像组件,减少摄像组件的清洁频率,有利于使用的便捷性,避免误碰摄像组件,导致摄像组件损坏,通过转向构件对巡检机器人转向,减小转弯直径,提高转向的灵活度,通过转向构件检测转向方位,提高转向的精准度。技术研发人员:张付贵,邓海桐受保护的技术使用者:南京探默空间技术有限公司技术研发日:20230919技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50454.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表