基于并联驱动方式的柔性机械臂腕
- 国知局
- 2024-07-08 10:51:12
本发明涉及软体机器人,尤其是涉及一种基于并联驱动方式的柔性机械臂腕。
背景技术:
1、近年来,具有高精度、高重复性作业能力的刚性机械臂在加工制造、灾后救援、资源勘探等领域得到了广泛应用。为了提高机械臂作业的灵巧性,研究者们提出使用机械腕以增加机械臂末端执行器的自由度。然而,传统的刚体机械腕受到刚性材料大惯性、高硬度等特性的限制,存在工作空间大,交互安全性低的痛点。这些痛点导致刚体机械腕难以适应农业、矿业以及水下(例如,礁石环境、珊瑚栖息地等)等非结构化作业环境。因此,面向非结构化受限环境开发一种紧凑、交互安全的机械腕迫在眉睫。
2、现阶段国内外研究可以根据驱动方式将机械腕分为以下三类:(1)电机驱动;(2)气压驱动;(3)液压驱动。其中,基于电机驱动的机械腕采用电机传动的工作原理,优点是定位精度高和响应速度快,缺点是质量大、结构柔顺性差。基于气压/液压驱动的机械腕通过控制机械腕结构组件中的气压/液压差来实现机械腕的基础运动,优点是带负载能力强,缺点是驱动器质量大且体积大,难以进行便携化设计。
技术实现思路
1、为解决上述背景技术中提出的问题,本发明采取的技术方案为:
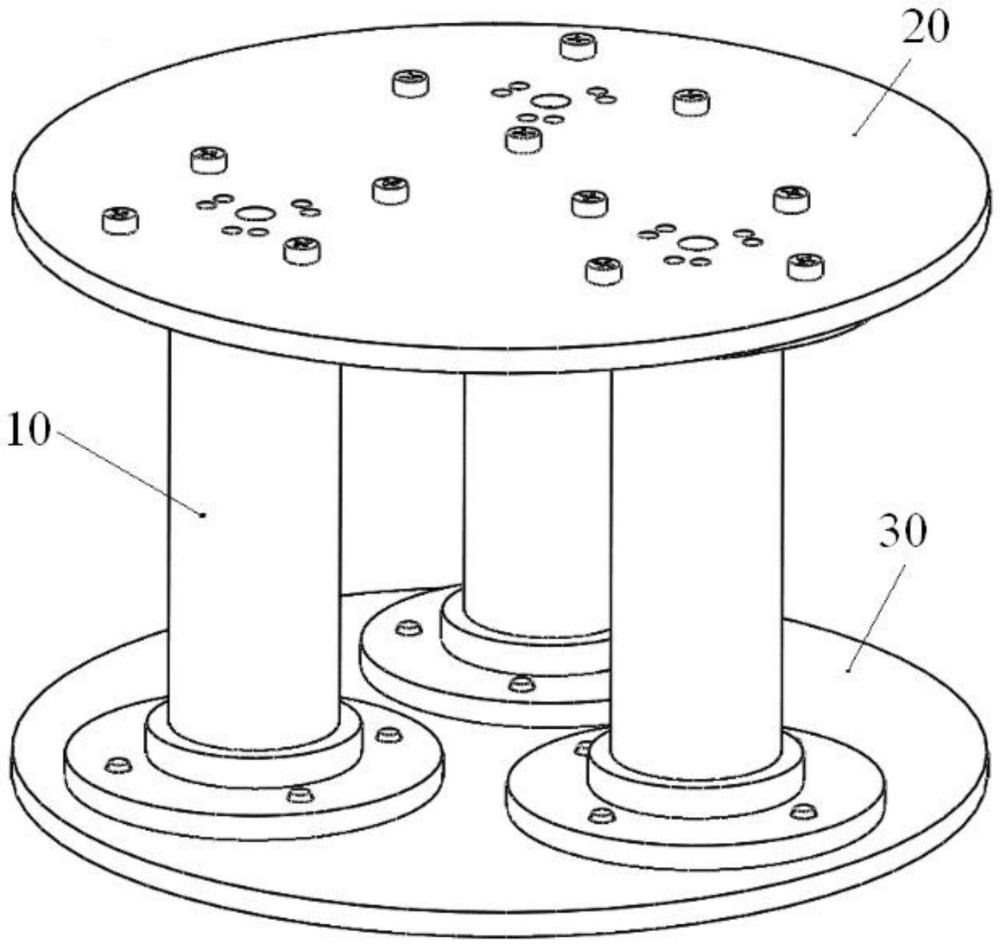
2、一种基于并联驱动方式的柔性机械臂腕,包括上表面、下表面及安装在上表面与下表面之间的三个人工肌肉;
3、三个人工肌肉结构相同,且三个人工肌肉相互平行,均匀分布在上表面与下表面之间;
4、对于任意一个人工肌肉,包括上盖、下盖及安装在上盖与下盖之间的硅胶主体;
5、所述上盖固定在上表面下方,所述下盖固定在下表面上方;
6、所述硅胶主体为圆柱形,所述硅胶主体内部包覆有多组镍钛记忆合金线圈及两个固定板;
7、每组镍钛记忆合金线圈的上下两端分别从上盖、上表面及下盖、下表面预留的线圈孔穿出,并与外部电路连接;
8、两个所述固定板均为圆环形,其中一个固定板上安装有多个磁铁,另一个固定板上安装有多个霍尔元件,所述磁铁与霍尔元件数量相同且上下一一对应;
9、所述硅胶主体的中部预留有圆柱形空腔,且该圆柱形空腔与圆环形固定板的中空区域对应,共同用于设置霍尔元件的导线。
10、在一些实施例中,工作时,所述上表面与下表面其中的一个表面用于与外部机械臂末端连接,另一个表面用于与外部机械手连接。
11、在一些实施例中,每组镍钛记忆合金线圈由两条线圈串联而成,两条线圈在上端通过焊点连接;
12、每条线圈均由镍钛记忆合金丝和硅胶毛细管组合后缠绕形成,镍钛记忆合金丝设置在硅胶毛细管内部。
13、在一些实施例中,所述硅胶主体内部包覆有三组镍钛记忆合金线圈,且三组镍钛记忆合金线圈均匀分布。
14、在一些实施例中,所述磁铁与霍尔元件的数量均为三个,且三个磁铁均匀分布在一个固定板的外侧,三个霍尔元件均匀分布在另一个固定板的外侧。
15、在一些实施例中,所述上盖与下盖的结构相同;
16、所述上盖包括圆盘状的盖体及固定在盖体一端中部的空心圆柱形的连接部,所述硅胶主体的端部设置在所述连接部的内侧。
17、在一些实施例中,所述上盖由内到外依次开设有中心孔、多个线圈孔与多个螺纹孔;
18、所述中心孔与硅胶主体的圆柱形空腔对应,用于供霍尔元件的导线的导线穿过;
19、所述线圈孔用于供镍钛记忆合金线圈的端部穿出;
20、所述螺纹孔位于连接部的外侧,用于安装螺栓,进而使所述上盖与外部机械结构连接;
21、所述上表面与下表面结构相同,所述上表面开设有与中心孔、多个线圈孔与多个螺纹孔对应的通孔。
22、与现有技术相比,本发明的有益效果是:
23、本发明提供的基于并联驱动方式的柔性机械臂腕,其结构紧凑,交互安全;采用硅胶材料为主体制成的人工肌肉,质量轻;三个并联的人工肌肉可独立控制,具有三个自由度;人工肌肉采用镍钛记忆合金线圈,依据镍钛记忆合金在不同温度下长度会发生变化的原理,可通过外部电路控制镍钛记忆合金线圈加热,来调整镍钛记忆合金线圈的长度,从而自动控制人工肌肉的运动,以及机械臂腕整体的运动;经过加热镍钛记忆合金线圈长度发生改变进而引起霍尔元件与磁铁之间的距离发生改变,磁场强度发生改变则霍尔元件的输出电压也发生改变,进而可方便地计算出人工肌肉的实际长度,有利于对机械臂腕的精确控制。
技术特征:1.一种基于并联驱动方式的柔性机械臂腕,其特征在于,包括上表面(20)、下表面(30)及安装在上表面(20)与下表面(30)之间的三个人工肌肉(10);
2.根据权利要求1所述的基于并联驱动方式的柔性机械臂腕,其特征在于,工作时,所述上表面(20)与下表面(30)其中的一个表面用于与外部机械臂末端连接,另一个表面用于与外部机械手连接。
3.根据权利要求2所述的基于并联驱动方式的柔性机械臂腕,其特征在于,每组镍钛记忆合金线圈(2)由两条线圈串联而成,两条线圈在上端通过焊点连接;
4.根据权利要求3所述的基于并联驱动方式的柔性机械臂腕,其特征在于,所述硅胶主体(6)内部包覆有三组镍钛记忆合金线圈(2),且三组镍钛记忆合金线圈(2)均匀分布。
5.根据权利要求4所述的基于并联驱动方式的柔性机械臂腕,其特征在于,所述磁铁(4)与霍尔元件(5)的数量均为三个,且三个磁铁(4)均匀分布在一个固定板(3)的外侧,三个霍尔元件(5)均匀分布在另一个固定板(3)的外侧。
6.根据权利要求1所述的基于并联驱动方式的柔性机械臂腕,其特征在于,所述上盖(1)与下盖(7)的结构相同;
7.根据权利要求6所述的基于并联驱动方式的柔性机械臂腕,其特征在于,所述上盖(1)由内到外依次开设有中心孔(14)、多个线圈孔(15)与多个螺纹孔(13);
技术总结本发明公开了一种基于并联驱动方式的柔性机械臂腕,包括上表面、下表面及三个人工肌肉;对于任意一个人工肌肉,包括上盖、下盖及安装在上盖与下盖之间的硅胶主体;上盖固定在上表面下方,下盖固定在下表面上方;硅胶主体为圆柱形,硅胶主体内部包覆有多组镍钛记忆合金线圈及两个固定板;每组镍钛记忆合金线圈的上下两端分别从上盖、上表面及下盖、下表面预留的线圈孔穿出,并与外部电路连接;两个固定板均为圆环形,其中一个固定板上安装有多个磁铁,另一个固定板上安装有多个霍尔元件,磁铁与霍尔元件数量相同且上下一一对应;硅胶主体的中部预留有圆柱形空腔,且该圆柱形空腔与圆环形固定板的中空区域对应,共同用于设置霍尔元件的导线。技术研发人员:程骋,胡飞宇,沈逸,岳作功,杨立仁,邰若晨受保护的技术使用者:华中科技大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50590.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表