一种智能巡检机器人的制作方法
- 国知局
- 2024-07-08 10:54:13
本发明涉及巡检机器人,具体是指一种智能巡检机器人。
背景技术:
1、为了减小人工负担,在工厂或者建筑工地的巡检过程中逐渐使用机器人代替人工进行巡检,特别是在一些特殊的危险工厂,例如石油化工类的工厂危险系数较大,便会使用机器人在工厂内进行巡检,这类机器人在巡检的过程中能够进行自定位、路径规划、智能感知、人脸识别、视频监控等行为,可以协助完成监控巡逻工作,实现动态巡检、无死角监控、异常预警,有效避免人工巡检的各种弊端。
2、一般,智能巡检机器人通过高清摄像头和红外成像探测器进行周围环境的巡检,但是,高清摄像头和红外成像探测器缺少相应的保护结构处于裸露状态,在外界工作时,灰尘容易将高清摄像头和红外成像探测器上的镜面覆盖,使得拍摄的画面清晰度下降,影响检测效果。
3、另外,智能巡检机器人在移动巡检时遇到巡检路面有垃圾时,不方便进行清理,而且移动时,外界的意外撞击也容易造成机器人的损坏,为此,我们提出了一种智能巡检机器人。
技术实现思路
1、针对上述情况,为克服现有技术中巡检机器人存在摄像画面不清晰、不方便清障的问题,本发明提供一种智能巡检机器人。
2、本发明采取的技术方案如下:
3、本发明一种智能巡检机器人,包括机器人本体和巡检设备本体,所述巡检设备本体设于机器人本体顶部,所述巡检设备本体由高清摄像头和红外成像探测器组成,还包括防护机构,所述防护机构设于机器人本体上,且罩设于巡检设备本体上;
4、所述防护机构包括驱动组件、防尘组件和防撞组件,所述驱动组件设于机器人本体上,所述防尘组件罩设于巡检设备本体上,且与驱动组件连接,所述防撞组件周向分布设于机器人本体四周,且与驱动组件连接;
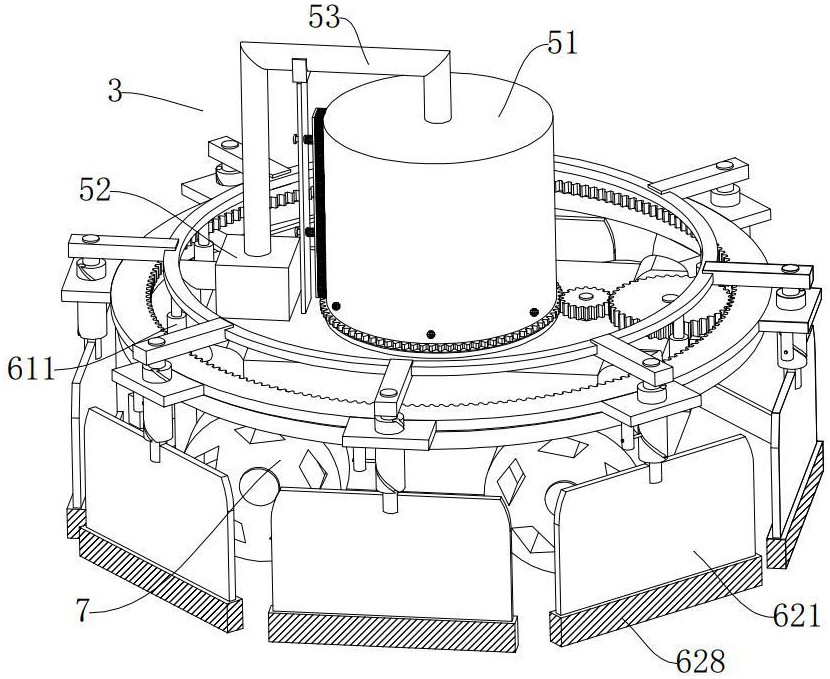
5、所述驱动组件包括电机、齿圈一、齿轮一、齿轮二和环形承接架,所述电机固定设于机器人本体内部,且其输出轴伸出机器人本体,所述齿轮一固定设于电机的输出轴上;所述环形承接架通过若干周向分布的支撑杆与机器人本体固定连接,且环形承接架位于机器人本体周围,所述齿圈一通过环形导轨一与环形承接架滑动连接,所述齿轮二通过转轴转动设于机器人本体上,所述齿轮二分别与齿轮一和齿圈一啮合,所述防尘组件与齿轮一传动连接,所述防撞组件分布设于齿圈一外侧,所述环形导轨一内凹于环形承接架上端面上,所述齿圈一通过其下部卡接于环形导轨一内,所述支撑杆一端固接于环形承接架,其另一端固接于机器人本体边缘部分;
6、所述防尘组件包括防尘罩和吹吸风机,所述防尘罩底端设有开口,所述防尘罩底端通过环形导轨二与机器人本体顶部滑动连接,所述防尘罩顶部连通设有吸气管,且吸气管与防尘罩顶部通过密封轴承转动连通;所述吹吸风机固定设于机器人本体顶部,所述吹吸风机的吸气端与吸气管连通,所述吹吸风机的出气端设有出风管,所述吸气管与机器人本体之间固定设有支撑板,且支撑板位于吸气管与防尘罩之间,所述防尘组件还包括清扫单元,所述清扫单元设于支撑板上,所述防尘罩为透明材质制成,且所述防尘罩底端开设有周向分布的进气口,所述进气口内嵌设有过滤网,所述环形导轨二内凹于机器人本体顶部端面上,所述防尘罩通过其下部卡接于环形导轨二内;
7、所述清扫单元包括滑动杆、清扫板和擦拭海绵,所述滑动杆水平式滑动贯穿于支撑板上,所述清扫板固定设于滑动杆一端,所述擦拭海绵固定设于清扫板朝向防尘罩的一侧,且与防尘罩外表面接触,所述清扫单元还包括压紧弹簧,所述压紧弹簧滑动套接于滑动杆上,且抵触在清扫板与支撑板之间。
8、进一步地,所述驱动组件还包括齿圈二,所述齿圈二固定套接于防尘罩底端,且与齿轮一啮合。
9、进一步地,所述防撞组件包括升降单元和旋转单元,所述升降单元固定设于机器人本体上端,所述旋转单元周向分布于齿圈一外侧,且与升降单元连接。
10、进一步地,所述升降单元包括电动伸缩杆、环形升降板和连接板,所述电动伸缩杆纵向且固定设于机器人本体对角位置,所述环形升降板固定设于电动伸缩杆伸缩端并呈水平分布上,所述连接板通过其一端开设的卡口与环形升降板外周缘滑动卡合,所述旋转单元顶部与连接板连接;所述连接板设置为条形,且其沿环形升降板径向方向周向排布。
11、进一步地,所述旋转单元包括防护板、导向柱和安装板,所述安装板固定设于齿圈一圆周壁面上,所述导向柱纵向且活动贯穿安装板,沿所述导向柱轴线方向固定贯穿有旋转杆,所述旋转杆顶端通过轴承与连接板转动连接,所述防护板通过其上端固定设于旋转杆底端;所述导向柱圆周表面还开设有螺旋导向槽,所述安装板底部固定设有立式固定杆,所述固定杆底端固定设有横向分布的导向销,所述导向销一端与螺旋导向槽滑动配合。
12、进一步地,所述防护板底部还固定设有清扫刷,所述出风管的出风口朝向清扫刷。
13、采用上述结构本发明取得的有益效果如下:
14、1、本发明通过其底部的移动轮在工厂中进行移动巡检,通过机器人本体顶部的巡检设备本体(高清摄像头和红外成像探测器),进行拍摄巡检,通过防护机构能够对机器人本体周围进行防撞保护,同时对巡检设备本体进行防尘保护,而且防护机构能够进行转动,对机器人本体巡检路面上的垃圾进行清扫,达到了高密度的功能集成式效果。
15、2、本发明通过设置的防尘组件,利用防尘罩将巡检设备本体罩住,减少灰尘污染巡检设备本体,而且通过吹吸风机,可以将防尘罩内部的热气排出,防止防尘罩内部温度较高,影响巡检设备本体的使用,同时进气口内的过滤网,可以将外界的灰尘过滤掉;同时与防护板底部清扫刷的配合,吹吸风机将热气通过出风管排出,并吹到清扫刷上,将清扫刷上的灰尘向机器人本体后方吹去,减少清扫刷上灰尘的的积累,提高清扫效果。
16、3、本发明通过防尘组件与驱动组件的配合,利用齿轮一与齿圈二的啮合传动配合,带动防尘罩转动,并通过设置的清扫单元,利用压紧弹簧的回弹力,将擦拭海绵紧密的贴合在防尘罩的表面,当防尘罩转动时,即可对防尘罩表面的灰尘进行清理,并且可以对过滤网上的灰尘进行清理,使防尘罩保持干净。
17、4、本发明通过设置的防撞组件与驱动组件的配合,能够带动防撞组件转动,使用时,启动电机,带动齿轮一转动,齿轮二随之转动,带动齿圈一转动,进而带动齿圈上的防撞组件转动,防撞组件的转动是实现了清扫路面垃圾功能,且其在转动和静止状态下,均具有对机器人本体防撞保护的功能,提高了防撞组件的功能多样性。
18、5、本发明通过设置的旋转单元与升降单元的配合,当升降单元带动旋转单元升降时,利用导向销的一端与螺旋导向槽滑动配合,带动导向柱发生转动,进而带动旋转杆发生转动,防护板发生转动,下降时,使防护板与其运动方向的夹角发生变化,扩大防护板底部清扫刷的清扫区域;上升时,防护板复位,防护板底部清扫刷脱离地面,使防护板既具有防撞的功能,又具有清扫的功能。
技术特征:1.一种智能巡检机器人,其特征在于:包括机器人本体(1)和巡检设备本体(2),所述巡检设备本体(2)设于机器人本体(1)顶部,所述巡检设备本体(2)由高清摄像头和红外成像探测器组成;还包括防护机构(3),所述防护机构(3)设于机器人本体(1)上,且罩设于巡检设备本体(2)上;
2.根据权利要求1所述的一种智能巡检机器人,其特征在于:所述驱动组件(4)还包括齿圈二(46),所述齿圈二(46)固定套接于防尘罩(51)底端,且与齿轮一(43)啮合。
3.根据权利要求1所述的一种智能巡检机器人,其特征在于:所述防撞组件(6)包括升降单元(61)和旋转单元(62),所述升降单元(61)固定设于机器人本体(1)上端,所述旋转单元(62)周向分布于齿圈一(42)外侧,且与升降单元(61)连接。
4.根据权利要求3所述的一种智能巡检机器人,其特征在于:所述升降单元(61)包括电动伸缩杆(611)、环形升降板(612)和连接板(613),所述电动伸缩杆(611)纵向且固定设于机器人本体(1)对角位置,所述环形升降板(612)固定设于电动伸缩杆(611)伸缩端并呈水平分布上,所述连接板(613)通过其一端开设的卡口与环形升降板(612)外周缘滑动卡合,所述旋转单元(62)顶部与连接板(613)连接;所述连接板设置为条形,且其沿环形升降板径向方向周向排布。
5.根据权利要求4所述的一种智能巡检机器人,其特征在于:所述旋转单元(62)包括防护板(621)、导向柱(622)和安装板(623),所述安装板(623)固定设于齿圈一(42)圆周壁面上,所述导向柱(622)纵向且活动贯穿安装板(623),沿所述导向柱(622)轴线方向固定贯穿有旋转杆(624),所述旋转杆(624)顶端通过轴承与连接板(613)转动连接,所述防护板(621)通过其上端固定设于旋转杆(624)底端;
6.根据权利要求5所述的一种智能巡检机器人,其特征在于:所述防护板(621)底部还固定设有清扫刷(628),所述出风管(54)的出风口朝向清扫刷(628)。
技术总结本发明公开了一种智能巡检机器人,包括机器人本体和巡检设备本体,所述巡检设备本体设于机器人本体顶部,所述巡检设备本体由高清摄像头和红外成像探测器组成,还包括防护机构,所述防护机构设于机器人本体上,且罩设于巡检设备本体上,所述防护机构包括驱动组件、防尘组件和防撞组件。本发明通过防护机构能够对机器人本体周围进行防撞保护,同时对巡检设备本体进行防尘保护,而且防护机构能够进行转动,对机器人本体巡检路面上的垃圾进行清扫。本发明涉及巡检机器人技术领域,具体是提供了一种智能巡检机器人。技术研发人员:方连娣,陈佳,吴海燕,殷文才受保护的技术使用者:江苏富莱士机械有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/50887.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。