一种节距可调的换热器检修机器人系统的制作方法
- 国知局
- 2024-07-08 10:54:40
本发明属于无损检测,具体涉及一种节距可调的换热器检修机器人系统。
背景技术:
1、核电产业的高速发展使得核安全问题愈加重要。换热器作为压水堆核电站的重要设备和安全屏障,其传热管的定期无损检测是核电安全中最至关重要的检修作业内容之一。目前,美、法等国都已开发了多款换热器传热管检修机器人,其主要可分为串联机器人及管板爬行机器人两种构型设计思路。其中,管板爬行机器人以其结构简单、体积小、重量轻的优势逐渐占据市场主导地位,如,美国西屋的pegasys、美国捷特的zr100、法国阿海珐的roger和forerunner等。
2、其中,美国西屋的pegasys是现场应用最早也是目前应用最广泛的管板爬行式换热器传热管检修机器人。其由base和foot两模块组成,两模块交叉安装,均装有管孔夹持装置,使两模块可牢固夹持于换热器传热管管孔中,两模块间能够进行相对直线运动与旋转运动,两运动自由度配合,从而实现机器人的爬行运动。base模块上可加装检修工具,通过base模块的移动,使用检修工具完成检修作业任务。pegasys重量小、承载能力大,且其工作空间能够覆盖全部传热管管孔,但其运动方式单一,运动和作业效率较低,在面对大规模的检修作业时稍显乏力。
技术实现思路
1、本发明的目的是提供一种节距可调的换热器检修机器人系统,能够解决现有的换热器定位装置运动和作业效率过低的问题,使其具有较高的运动灵活性和运动效率,从而提高其作业效率。
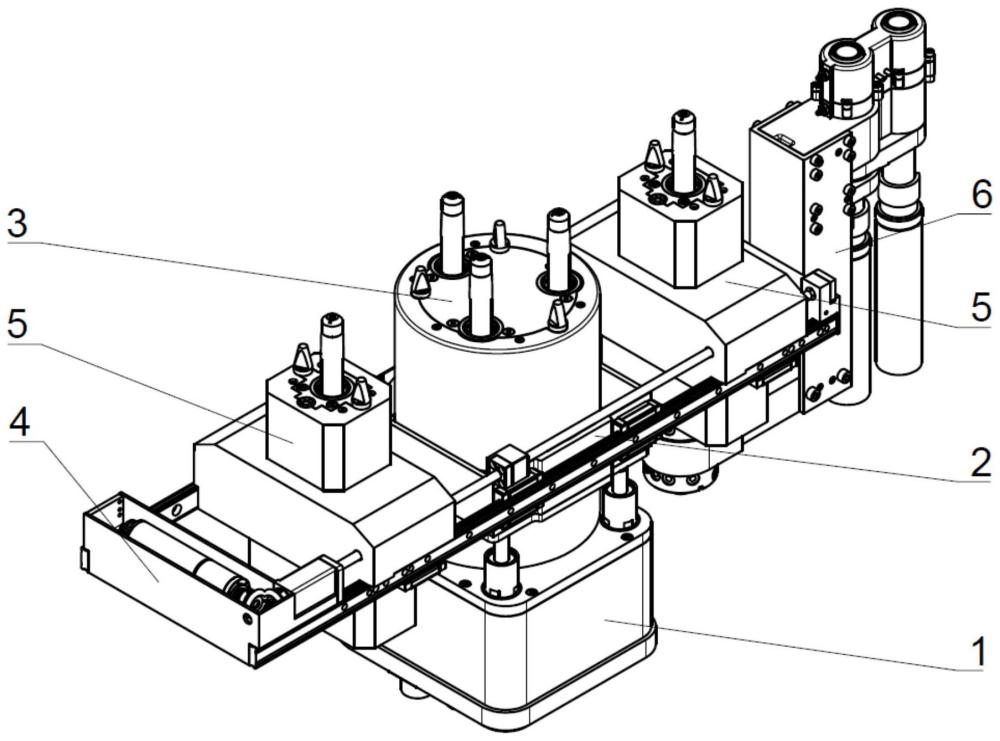
2、本发明的技术方案如下:一种节距可调的换热器检修机器人系统,包括基座模块、升降模块、旋转模块、滑动模块、调节模块和检修工具模块,所述的升降模块位于基座模块上方,旋转模块和滑动模块分别安装于升降模块的内侧和外侧,调节模块为两个,分别位于滑动模块的两端,检修工具模块安装在一侧调节模块的外侧。
3、所述的基座模块通过航插接头与控制电缆连接,基座模块与升降模块通过气缸相连,实现基座模块与升降模块间的升降自由度。
4、所述的基座模块内安装有驱动电机和谐波减速器,驱动电机通过谐波减速器进行转动输出,并通过谐波减速器输出端与旋转模块相连,实现基座模块与旋转模块间的旋转自由度。
5、所述的升降模块位于基座模块上方,其上装有导轨滑块和丝杠螺母,与滑动模块相配合。
6、所述的旋转模块位于基座模块上方,升降模块内侧,与基座模块的谐波减速器相连。
7、所述的旋转模块上装有三个管孔夹持装置,三个管孔夹持装置呈三角形布置,其布置方式与目标换热器管板管孔的排布方式相匹配。
8、所述的滑动模块包括导轨、丝杠、驱动电机和锥齿轮,滑动模块通过导轨和丝杠与升降模块的导轨滑块和丝杠螺母相配合,安装在升降模块外侧,驱动电机位于滑动模块一侧通过一组锥齿轮驱动丝杠旋转,实现滑动模块和升降模块间的相对移动。
9、所述的调节模块包括管孔夹持装置、导轨滑块、调节模块壳体、驱动电机、锥齿轮、电磁阀和丝杠螺母,其中,管孔夹持装置通过电磁阀驱动。调节模块通过导轨滑块和丝杠螺母与滑动模块的导轨和丝杠相配合,驱动电机通过一组锥齿轮驱动丝杠螺母在滑动模块的丝杠上旋转,实现调节模块和滑动模块间的相对移动。
10、所述的驱动电机、锥齿轮、电磁阀和丝杠螺母均设置在调节模块壳体内。
11、所述的检修工具模块安装于调节模块下方,与调节模块通过快换接头连接。
12、本发明的有益效果在于:本发明构型简单、运动灵活,具有较高的运动灵活性和运动效率,同时具有较高的检修作业效率。本发明共具有5个运动自由度,其中,4个运动自由度由电机驱动,包括旋转模块3与升降模块2间的旋转自由度、滑动模块4与升降模块2间的移动自由度、两个调节模块5与滑动模块间的移动调节自由度,第5个运动自由度由气缸驱动,即升降模块2与基座模块1间的升降自由度。本发明移动时,通过旋转模块3与两个调节模块5的交替抓持实现爬行运动。本发明4个电机驱动的运动自由度均设计有编码器、接近开关等传感器,从而保证其能够完成精确的连续运动,使本发明具有较大的连续动作空间。本发明的3个移动自由度能够精确调节升降模块2、滑动模块4和两个调节模块5的相对位置,配合旋转自由度的运动,可以使检修机器人能够在管板上沿各种角度斜线灵活爬行,并能够时刻调整爬行方向,从而大幅提高了检修机器人的运动灵活性和运动效率,进而有效提高了检修机器人的检修作业效率。本发明调节模块5和检修工具模块6均设计有视觉传感器,能够辅助校准升降模块2和两个调节模块5的绝对位置,从而进一步保证检修机器人的运动精度。各运动自由度的驱动部件、传动部件及其相应的控制部件均采用模块化集成设计思路,使检修机器人系统的设备升级、日常使用和维护拆装更为便捷。
技术特征:1.一种节距可调的换热器检修机器人系统,其特征在于:包括基座模块、升降模块、旋转模块、滑动模块、调节模块和检修工具模块,所述的升降模块位于基座模块上方,旋转模块和滑动模块分别安装于升降模块的内侧和外侧,调节模块为两个,分别位于滑动模块的两端,检修工具模块安装在一侧调节模块的外侧。
2.如权利要求1所述的一种节距可调的换热器检修机器人系统,其特征在于:所述的基座模块通过航插接头与控制电缆连接,基座模块与升降模块通过气缸相连,实现基座模块与升降模块间的升降自由度。
3.如权利要求1所述的一种节距可调的换热器检修机器人系统,其特征在于:所述的基座模块内安装有驱动电机和谐波减速器,驱动电机通过谐波减速器进行转动输出,并通过谐波减速器输出端与旋转模块相连,实现基座模块与旋转模块间的旋转自由度。
4.如权利要求1所述的一种节距可调的换热器检修机器人系统,其特征在于:所述的升降模块位于基座模块上方,其上装有导轨滑块和丝杠螺母,与滑动模块相配合。
5.如权利要求3所述的一种节距可调的换热器检修机器人系统,其特征在于:所述的旋转模块位于基座模块上方,升降模块内侧,与基座模块的谐波减速器相连。
6.如权利要求5所述的一种节距可调的换热器检修机器人系统,其特征在于:所述的旋转模块上装有三个管孔夹持装置,三个管孔夹持装置呈三角形布置,其布置方式与目标换热器管板管孔的排布方式相匹配。
7.如权利要求4所述的一种节距可调的换热器检修机器人系统,其特征在于:所述的滑动模块包括导轨、丝杠、驱动电机和锥齿轮,滑动模块通过导轨和丝杠与升降模块的导轨滑块和丝杠螺母相配合,安装在升降模块外侧,驱动电机位于滑动模块一侧通过一组锥齿轮驱动丝杠旋转,实现滑动模块和升降模块间的相对移动。
8.如权利要求1所述的一种节距可调的换热器检修机器人系统,其特征在于:所述的调节模块包括管孔夹持装置、导轨滑块、调节模块壳体、驱动电机、锥齿轮、电磁阀和丝杠螺母,管孔夹持装置通过电磁阀驱动,调节模块通过导轨滑块和丝杠螺母与滑动模块的导轨和丝杠相配合,驱动电机通过一组锥齿轮驱动丝杠螺母在滑动模块的丝杠上旋转,实现调节模块和滑动模块间的相对移动。
9.如权利要求8所述的一种节距可调的换热器检修机器人系统,其特征在于:所述的驱动电机、锥齿轮、电磁阀和丝杠螺母均设置在调节模块壳体内。
10.如权利要求1所述的一种节距可调的换热器检修机器人系统,其特征在于:所述的检修工具模块安装于调节模块下方,与调节模块通过快换接头连接。
技术总结本发明属于无损检测技术领域,具体涉及一种节距可调的换热器检修机器人系统。包括基座模块、升降模块、旋转模块、滑动模块、调节模块和检修工具模块,所述的升降模块位于基座模块上方,旋转模块和滑动模块分别安装于升降模块的内侧和外侧,调节模块为两个,分别位于滑动模块的两端,检修工具模块安装在一侧调节模块的外侧。本发明的有益效果在于:构型简单、运动灵活,具有较高的运动灵活性和运动效率,同时具有较高的检修作业效率。技术研发人员:高厚秀,樊继壮,廖述圣,陈姝,刘江,张学贺,赵杰受保护的技术使用者:中核武汉核电运行技术股份有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/50938.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表