一种无源助力手臂及穿戴设备的制作方法
- 国知局
- 2024-07-08 10:58:30
本申请涉及外骨骼的领域,尤其是涉及一种无源助力手臂及穿戴设备。
背景技术:
1、目前,在物流仓储、工业制造、军工等领域的一些工作场景,已逐步开始采用主动助力装置,以减轻劳动者的劳动负担,缓解劳动者的肌肉疲劳以及损伤,提高工作效率,同时减少安全事故的发生。
2、但目前常用的主动助力装置无法根据工作内容提供力值相适应的助力,提供的力值较小则无法满足实际工作中的助力需要,而提供的力值较大,则容易产生一些破坏事故,导致某些工件、产品等部件的损坏。
技术实现思路
1、为了便于调节主动助力装置的助力大小,本申请提供一种无源助力手臂及穿戴设备,能够根据需要调节助力大小以适应不同的工况,且结构简单稳定,实施成本低。
2、第一方面,本申请提供的一种无源助力手臂采用如下的技术方案:
3、一种无源助力手臂,包括:
4、主体支撑部;
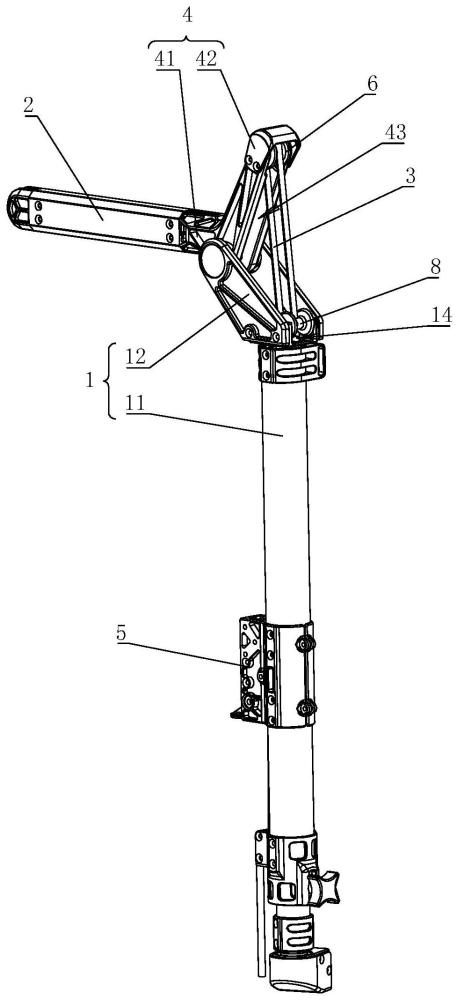
5、连接件,转动安装于主体支撑部,且至少具有一个固定端和一个弹力作用端;
6、旋转摆臂,固定于固定端;
7、弹性件,所述弹性件的活动端与弹力作用端相连,并用于拉动旋转摆臂转动,所述弹性件的调节端活动设置于主体支撑部上;
8、调节锁定机构,设置于主体支撑部,并用于调节和锁定弹性件的调节端位于主体支撑部上的位置,以调节助力大小。
9、通过采用上述技术方案,弹性件拉动连接件以带动旋转摆臂转动,进而在人体手臂提起重物时提供助力,减少劳动负担;利用调节锁定机构调节弹性件的调节端位于主体支撑部上的位置,改变弹性件的拉伸程度,调节弹力大小,进而调节助力手臂的助力大小,使得使用者可以根据不同的工况和场景灵活调节相适应的助力,提高助力装置的适用性,满足助力需要的同时,避免产生部件损坏。
10、可选的,所述调节锁定机构包括拉紧件和锁定座,所述拉紧件连接于弹性件的调节端,所述拉紧件具有拉动弹性件的调节端移动的活动量,以使弹性件的调节端远离弹性件的活动端,所述锁定座用于锁住拉紧件的位置。
11、通过采用上述技术方案,利用拉紧件拉动弹性件的调节端,即可将弹性件拉伸,以提高弹性件的弹力,进而增大助力,同时配合锁定座将拉紧件锁定,即可使弹性件保持于调整后的弹力,满足助力需要;需要减小助力时,利用锁定座松开拉紧件,使弹性件自动复位即可,调节至所需大小后,再锁定拉紧件,调节结构简单稳定,且易于操作;而且穿戴者可以保持助力手臂的穿戴状态,直接利用拉紧件调节助力手臂的助力大小,无需脱下助力手臂,大大提高了助力调节的便捷性及效率。
12、可选的,所述拉紧件为具有柔性的拉绳。
13、通过采用上述技术方案,柔性结构的拉紧件的设置难度更低,提高适配性的同时,可以减小装配难度。
14、可选的,所述锁定座包括座体和至少一个活动部,所述座体安装于主体支撑部,所述活动部活动设置于座体,所述活动部具有至少一个与座体配合夹紧拉紧件的端面。
15、通过采用上述技术方案,利用活动部与座体的夹持配合对拉紧件进行锁定,解锁与锁定状态之间的切换十分便捷,易于操作,且结构简单耐用。
16、可选的,所述端面形成有若干凸起。
17、通过采用上述技术方案,凸起可以增大端面与拉紧件之间的摩擦力,进而提高锁定效果。
18、可选的,所述主体支撑部形成有第一滑移腔,所述弹性件的调节端设置于第一滑移腔,所述主体支撑部靠近连接件的一端形成有开口,所述开口与第一滑移腔相连通,所述弹性件的活动端从开口伸出以连接弹力作用端。
19、通过采用上述技术方案,主体支撑部能够对内部的弹性件形成隔离保护效果,避免弹性件被磨损,且外部结构整洁美观;同时主体支撑部对弹性件的伸缩路径形成限制,避免弹性件发生缠绕等情况,提高弹性件伸缩时的稳定性。
20、可选的,所述主体支撑部形成有第一滑移腔,所述弹性件的调节端设置于第一滑移腔,所述主体支撑部靠近连接件的一端形成有开口,所述开口与第一滑移腔相连通,所述弹性件的活动端从开口伸出以连接弹力作用端,所述主体支撑部形成有穿设口,所述穿设口连通第一滑移腔,以供拉紧件从第一滑移腔伸出。
21、通过采用上述技术方案,通过将拉紧件从穿设口伸出,以供人手抓取,拉动拉紧件即可改变弹性件调节端的位置,以调节助力大小,同时保持弹性件位于主体支撑部内而不受外界干扰,进一步提高了对弹性件的保护效果,进而提高了装置的耐用性;同时柔性的绳体便于拉紧件从穿设口伸出,装配难度低。
22、可选的,所述主体支撑部位于开口处转动设置有至少一个限位滚轮,所述弹性件的活动端偏离主体支撑部时,所述弹性件抵接于限位滚轮的外圆面。
23、通过采用上述技术方案,限位滚轮对弹性件的伸缩以及摆动进行限位,提高弹性件的稳定性,同时避免弹性件接触中空杆体而产生磨损,提高耐用性能。
24、第二方面,本申请提供的一种穿戴设备采用如下的技术方案:
25、一种穿戴设备,包括腰带、背带和上述的一种无源助力手臂,所述背带连接于腰带,所述背带用于穿戴在人体肩膀处,所述腰带用于围束在人体腰部,还包括延长杆和调节座,所述调节座固定于主体支撑部,所述延长杆穿设于调节座,所述延长杆一端固定于腰带,另一端伸入至主体支撑部内,所述调节座设置有用于锁定延长杆位置的锁定螺杆,所述主体支撑部远离延长杆的端部与背带相固定。
26、通过采用上述技术方案,通过调节延长杆伸出的长度,即可调节旋转摆臂与腰带之间的间距,以匹配不同体格的穿戴者,提高穿戴设备的适配性。
27、可选的,所述锁定螺杆靠近延长杆的端部设置有锁定块,所述锁定块贴合于延长杆,所述锁定螺杆带动锁定块向靠近或远离延长杆的方向移动。
28、通过采用上述技术方案,锁定螺杆与锁定块的配合能够快速实现延长杆解锁与锁定状态之间的切换,使用便捷,有效提高调节的效率。
29、综上所述,本申请包括以下至少一种有益技术效果:
30、1.弹性件拉动连接件以带动旋转摆臂转动,进而在人体手臂提起重物时提供助力,减少劳动负担;利用调节锁定机构调节弹性件的调节端位于主体支撑部上的位置,改变弹性件的拉伸程度,调节弹力大小,进而调节助力手臂的助力大小,使得使用者可以根据不同的工况和场景灵活调节相适应的助力,提高助力装置的适用性,满足助力需要的同时,避免产生部件损坏;
31、2.利用拉紧件拉动弹性件的调节端,即可将弹性件拉伸,以提高弹性件的弹力,进而增大助力,同时配合锁定座将拉紧件锁定,即可使弹性件保持于调整后的弹力,满足助力需要;需要减小助力时,利用锁定座松开拉紧件,使弹性件自动复位即可,调节至所需大小后,再锁定拉紧件,调节结构简单稳定,且易于操作;
32、3.利用主体支撑部对内部的弹性件形成隔离保护效果,避免弹性件被磨损,且外部结构整洁美观;同时主体支撑部对弹性件的伸缩路径形成限制,避免弹性件发生缠绕等情况,提高弹性件伸缩时的稳定性。
技术特征:1.一种无源助力手臂,其特征在于,包括:
2.根据权利要求1所述的一种无源助力手臂,其特征在于:所述调节锁定机构(5)包括拉紧件(51)和锁定座(52),所述拉紧件(51)连接于弹性件(3)的调节端(32),所述拉紧件(51)具有拉动弹性件(3)的调节端(32)移动的活动量,以使弹性件(3)的调节端(32)远离弹性件(3)的活动端(31),所述锁定座(52)用于锁住拉紧件(51)的位置。
3.根据权利要求2所述的一种无源助力手臂,其特征在于:所述拉紧件(51)为具有柔性的拉绳。
4.根据权利要求2所述的一种无源助力手臂,其特征在于:所述锁定座(52)包括座体(521)和至少一个活动部(522),所述座体(521)安装于主体支撑部(1),所述活动部(522)活动设置于座体(521),所述活动部(522)具有至少一个与座体(521)配合夹紧拉紧件(51)的端面(523)。
5.根据权利要求4所述的一种无源助力手臂,其特征在于:所述端面(523)形成有若干凸起。
6.根据权利要求1所述的一种无源助力手臂,其特征在于:所述主体支撑部(1)形成有第一滑移腔(13),所述弹性件(3)的调节端(32)设置于第一滑移腔(13),所述主体支撑部(1)靠近连接件(4)的一端形成有开口(14),所述开口(14)与第一滑移腔(13)相连通,所述弹性件(3)的活动端(31)从开口(14)伸出以连接弹力作用端(42)。
7.根据权利要求3所述的一种无源助力手臂,其特征在于:所述主体支撑部(1)形成有第一滑移腔(13),所述弹性件(3)的调节端(32)设置于第一滑移腔(13),所述主体支撑部(1)靠近连接件(4)的一端形成有开口(14),所述开口(14)与第一滑移腔(13)相连通,所述弹性件(3)的活动端(31)从开口(14)伸出以连接弹力作用端(42),所述主体支撑部(1)形成有穿设口(15),所述穿设口(15)连通第一滑移腔(13),以供拉紧件(51)从第一滑移腔(13)伸出。
8.根据权利要求1所述的一种无源助力手臂,其特征在于:所述主体支撑部(1)位于开口(14)处转动设置有至少一个限位滚轮(8),所述弹性件(3)的活动端(31)偏离主体支撑部(1)时,所述弹性件(3)抵接于限位滚轮(8)的外圆面。
9.一种穿戴设备,包括腰带(02)和背带(01),所述背带(01)连接于腰带(02),所述背带(01)用于穿戴在人体肩膀处,所述腰带(02)用于围束在人体腰部,其特征在于:包括权利要求1-8任意一项所述的一种无源助力手臂,还包括延长杆(18)和调节座(9),所述调节座(9)固定于主体支撑部(1),所述延长杆(18)穿设于调节座(9),所述延长杆(18)一端固定于腰带(02),另一端伸入至主体支撑部(1)内,所述调节座(9)设置有用于锁定延长杆(18)位置的锁定螺杆(91),所述主体支撑部(1)远离延长杆(18)的端部与背带(01)相固定。
10.根据权利要求9所述的一种穿戴设备,其特征在于:所述锁定螺杆(91)靠近延长杆(18)的端部设置有锁定块(92),所述锁定块(92)贴合于延长杆(18),所述锁定螺杆(91)带动锁定块(92)向靠近或远离延长杆(18)的方向移动。
技术总结本申请涉及外骨骼的领域,具体公开了一种无源助力手臂及穿戴设备,其包括主体支撑部,旋转摆臂和弹性件,主体支撑部作为主体结构,分别连接于人体的腰部和肩部,以对助理手臂整体结构形成支撑,旋转摆臂活动连接于主体支撑部,并与穿戴者手臂同步摆动,弹性件设置于主体支撑部内,并与旋转摆臂相连,弹性件收缩并拉拽旋转摆臂向远离人体腰部的方向转动,以提供助力,同时弹性件连接有拉紧件,主体支撑部设置有用于锁定拉紧件的锁定座,拉动拉紧件并锁定,即可调节并保持弹性件的弹力大小,以实现对助力的调节。本申请具有助力可调、结构简单稳定且实施成本低的优点。技术研发人员:王昕,徐振华受保护的技术使用者:上海傲鲨智能科技有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51328.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表