一种含有子闭环位姿解耦的五自由度并联机构
- 国知局
- 2024-07-08 11:01:23
本发明属于并联机构,具体涉及一种含有子闭环位姿解耦的五自由度并联机构。
背景技术:
1、在现代制造业中,并联机构得到了广泛的应用,特别是少自由度并联机构,其不仅具有传统并联机构所拥有的机构紧凑、承载能力强等特点,还具有机构简单和控制容易等优点。
2、在并联机构上运用子闭环的构型,可以起到简化结构、降低动平台干涉及增大动平台工作空间的作用。公开号为cn112238443b的中国专利申请中公开了一种含有恰约束和复合驱动支链的并联机构,采用了子闭环的构型,降低了机构的控制难度。公开号为cn113002698a的中国专利申请中公开了一种具有双动平台的五自由度并联机构,采用子动平台组成子闭环,使机构具有承载能力强及姿态空间大的特点。公开号为cn1803411a中国专利申请中公开了一种三自由度解耦并联机构,解耦的特性使其具有控制容易与精度高的优点。但传统的并联机构一般支链数与自由度数相同,且支链全都连接在动平台上,因此动平台的约束较多,这样容易造成动平台的工作空间较小,并且其强耦合性增加了机构的控制难度。
技术实现思路
1、为了解决上述问题,本发明的目的在于提供一种含有子闭环位姿解耦的五自由度并联机构。
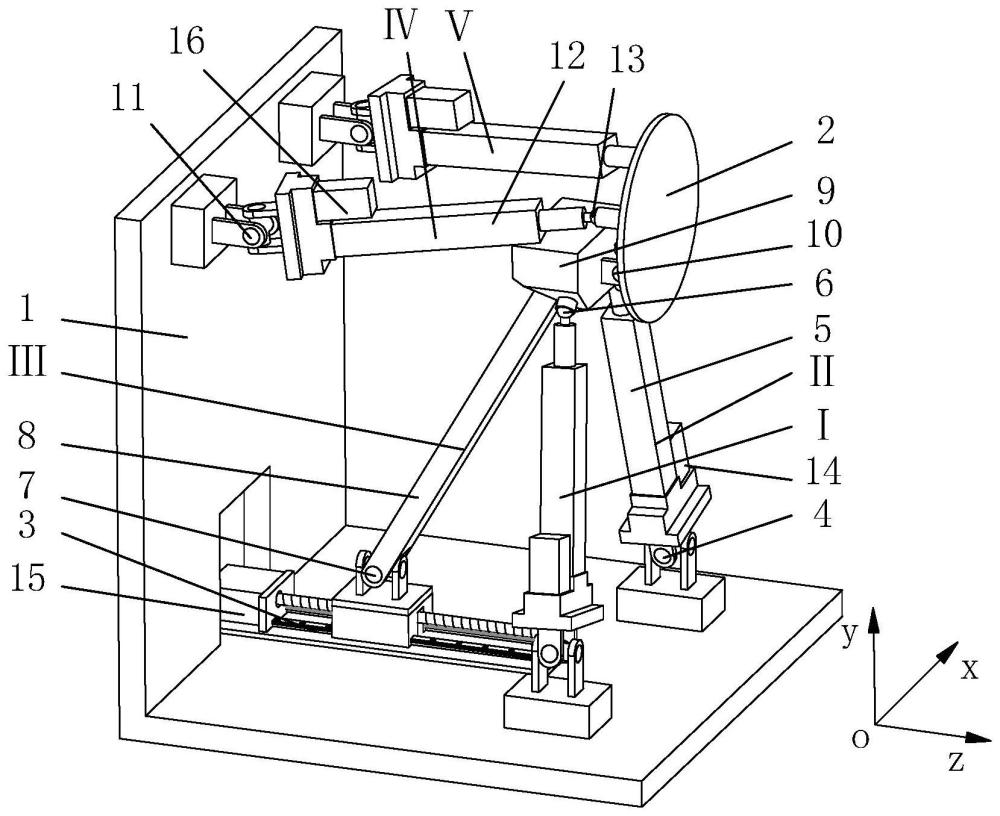
2、为了达到上述目的,本发明提供的含有子闭环位姿解耦的五自由度并联机构包括机架、动平台、由第一支链ⅰ、第二支链ⅱ和第三支链ⅲ构成的三自由度子闭环结构、第四支链ⅳ和第五支链ⅴ;
3、其中,机架为由竖直板和水平板构成的l形板状结构,其中竖直板的下部形成有一个长方形孔洞;
4、动平台的内侧面上设有位于下部的第三虎克铰支座和位于上部的两个第二球铰支座;
5、第三支链ⅲ包括第二移动组件、第二虎克铰、定长杆、中间连接件、第三虎克铰和第一球铰支座;其中,第二移动组件包括滑轨、滑块、丝杠、第二电机和第二虎克铰支座;滑轨沿机架上水平板的长度方向固定在水平板的顶面内侧中部;丝杠以与滑轨平行的方式设置在滑轨的一侧;第二电机设置在滑轨的一端外侧且穿过机架上的长方形孔洞,并且输出轴与丝杠的一端相连;滑块通过丝杠螺母与丝杠相连,同时以滑动方式安装在滑轨上;第二虎克铰支座设置在滑块的顶面上;滑轨、滑块、丝杠和第二电机构成移动副;定长杆的下端通过第二虎克铰与第二虎克铰支座相连,上端连接在中间连接件的底部后侧部位;中间连接件的底部前侧设有两个面对称的第一球铰支座,前端面中部通过第三虎克铰与动平台上的第三虎克铰支座相接;
6、第一支链ⅰ与第二支链ⅱ的结构相同且对称设置,均包括第一虎克铰、第一移动组件、第一球铰和第一虎克铰支座;其中,第一移动组件包括第一电机和第一伸缩杆;第一虎克铰支座的底面固定在机架上水平板的顶面外部一侧;第一伸缩杆的下端通过第一虎克铰与第一虎克铰支座相连,上端连接第一球铰;第一支链ⅰ与第二支链ⅱ上的第一球铰分别与第三支链ⅲ的中间连接件上两个第一球铰支座相接;第一电机的输出端与第一伸缩杆相连接;
7、第四支链ⅳ与第五支链ⅴ的结构相同且对称设置,均包括第四虎克铰、第三移动组件、第二球铰和第四虎克铰支座;其中,第三移动组件包括第三电机和第二伸缩杆;第四虎克铰支座固定在机架上竖直板的前端面上部一侧;第二伸缩杆的一端通过第四虎克铰与第四虎克铰支座相连,另一端通过第二球铰与动平台上的第二球铰支座相连;第三电机的输出端与第二伸缩杆相连接。
8、所述动平台上的第三虎克铰支座和两个第二球铰支座呈品字形分布。
9、与现有技术相比,本发明的优点是:
10、1、采用子闭环的构型设计,减少了与动平台相连的支链数目,降低了动平台的干涉及增大了动平台的工作空间;
11、2、第四支链和第五支链可单独控制动平台的姿态,而第一支链、第二支链和第三支链构成的子闭环结构可控制动平台在三个方向上的移动,整体机构具有位姿解耦的特性,可有效改善机构的控制和精度;
12、3、整体机构成面对称,有两对支链完全相同,可降低制造成本。
技术特征:1.一种含有子闭环位姿解耦的五自由度并联机构,其特征在于:所述含有子闭环位姿解耦的五自由度并联机构包括机架(1)、动平台(2)、由第一支链ⅰ、第二支链ⅱ和第三支链ⅲ构成的三自由度子闭环结构、第四支链ⅳ和第五支链ⅴ;
2.根据权利要求1所述的一种含有子闭环位姿解耦的五自由度并联机构,其特征在于:所述动平台(2)上的第三虎克铰支座(201)和两个第二球铰支座(202)呈品字形分布。
技术总结一种含有子闭环位姿解耦的五自由度并联机构。其包括机架、动平台、第一支链、第二支链、第三支链、第四支链和第五支链。与现有技术相比,本发明的优点是:首先,第一支链和第二支链与机架和第三支链相连,构成了一个子闭环,减少了与动平台连接支链的数目,降低了动平台的干涉并增大了工作空间;其次,第四支链和第五支链可单独控制动平台的姿态,而第一支链、第二支链和第三支链构成的子闭环结构,可控制动平台在三个方向上的移动,整体机构具有位姿解耦特性,因此可降低机构的控制难度和提高机构的精度;最后,整体机构成面对称,有两对支链完全相同,可降低制造成本。技术研发人员:王旭浩,郑志鹏,吴孟丽,史旭升,郭志永,曹轶然受保护的技术使用者:中国民航大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51527.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表