一种模块化丝传动连续体驱动装置及工作方法
- 国知局
- 2024-07-08 11:05:18
本发明涉及机器人,具体为一种模块化丝传动连续体驱动装置及工作方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、连续体机器人由于再非结构化环境下具有良好适应性、被动柔性,并且结构简单、易于小型化等特点,被广泛应用于手术场景,例如泌尿外科手术机器人、腹腔镜手术机器人、眼科手术机器人、脊柱外科手术机器人等。受到手术场景中的相关要求,连续体机器人多采用驱动电机与连续体分离的设计,而连续体与电机之间多采用丝传动或杆传动。
3、为保证驱动机构的紧凑性,目前连续体的驱动机构多采用电机+减速机+滚珠丝杆或同步带+驱动丝的传动方式;针对单段连续体多采用三丝驱动或四丝驱动模式;连续体又分为单段模式与双段模式;连续体的直径根据不同的应用场景也会有不同的配置。
4、发明人发现,当驱动机构采用电机+减速机+滚珠丝杆/同步带+驱动丝的传动方式时,容易受减速机速比大、滚珠丝杆导程小、同步带刚性高、机构复杂摩擦力大等问题,造成驱动机构的逆驱性能较差,进而导致连续体驱动丝自身张力难以反馈至电机电流的变化,使得连续体难以应用力矩控制模式,导致众多成熟的动力学控制方法难以应用;而通过在驱动丝上增加拉力传感器的方式则会导致机构复杂、硬件成本增加的问题。
5、此外,当连续体驱动丝数量发生改变、连续体段数发生改变以及连续体半径发生改变时,均需要重新设计加工驱动机构,这会增加设备的制造成本。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种模块化丝传动连续体驱动装置及工作方法,在同一个驱动机构上通过模块化的组装能够实现连续体驱动丝数量的配置变化、连续体段数配置变化及连续体直径的调整,节省连续体驱动机构制造成本,增加连续体控制精度。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种模块化丝传动连续体驱动装置,包括:
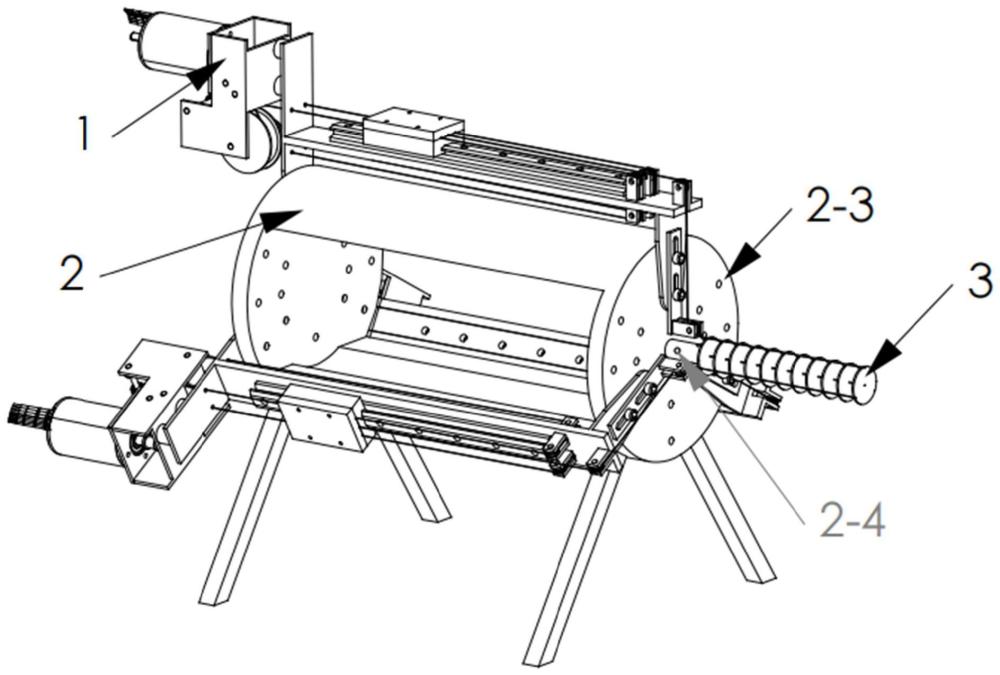
4、驱动装置支架,呈圆柱形,其中一个端面用于与连续体连接,圆周外侧均匀布置至少一组驱动丝牵引模块;
5、驱动丝牵引模块,包括连接在驱动电机输出轴上的电机导轮,电机导轮通过第一传动丝带动大变速轮转动,大变速轮同轴连接小变速轮,小变速轮通过第二传动丝带动滑块沿水平方向运动,滑块连接第三传动丝的一端,第三传动丝的另一端穿过连续体内部的穿孔并与连续体的末端圆盘连接。
6、进一步的,驱动丝牵引模块设有驱动丝牵引模块支架,驱动丝牵引模块支架一端设有变速箱,变速箱内设有至少两组减速导轮,减速导轮通过导轮支撑杆与变速箱壳体连接,减速导轮绕导轮支撑杆转动且不沿杆滑动。
7、进一步的,变速箱壳体与驱动电机连接,驱动电机输出轴连接电机导轮,第一传动丝依次经过电机导轮、其中一组减速导轮、大变速轮和另一组减速导轮后,回到电机导轮,形成闭环的丝传动单级减速机构;大变速轮与小变速轮同轴布置且固定连接,大变速轮在第一传动丝的带动下,将驱动电机的力矩放大至小变速轮。
8、进一步的,驱动丝牵引模块支架上表面设有滑轨,滑轨上设有滑动连接的滑块,第二传动丝由滑块的一端引出后,经过小变速轮回到滑块的另一端,期间经过多组水平传动丝导轮,使小变速轮的转动在多组水平传动丝的带动下,带动滑块沿滑轨进行水平运动。
9、进一步的,驱动丝牵引模块支架另一端设有垂直换向轮,垂直换向轮下方空间设有直径调节换向轮,第三传动丝的一端与滑块连接,另一端依次经过垂直换向轮和直径调节换向轮后,与连续体末端圆盘连接。
10、进一步的,第三传动丝通过垂直换向轮和直径调节换向轮完成两次换向,滑块水平方向的运动转换为垂直方向后,再转换为水平方向的运动,利用滑块的水平方向运动水,向第三传动丝传递拉力。
11、进一步的,通过改变直径调节换向轮与垂直换向轮之间的间距,适应不同直径的连续体。
12、进一步的,连续体具有位于轴线位置的中心弹性杆,沿中心弹性杆方向等距离布置多个导线圆盘,各导线圆盘上周向均布穿孔,连续体未发生弯曲时各圆盘上的穿孔轴线共线,位于末端的导线圆盘的穿孔用于连接传动丝,位于首端的导线圆盘为连续体基座。
13、进一步的,驱动装置支架的其中一个端面上设有连续体固定孔,用于与连续体基座上的连续体快接导向柱配合,连续体快接导向柱上设有连续体固定销孔,通过插入轴销,实现连续体与驱动装置支架的快速装配。
14、本发明的第二个方面提供一种模块化丝传动连续体驱动装置的工作方法,包括以下步骤:
15、驱动电机动作,带动输出轴上的电机导轮转动,电机导轮在减速导轮的配合下,通过第一传动丝带动大变速轮转动,大变速轮同轴带动小变速轮转动,将驱动电机的力矩放大至小变速轮;
16、小变速轮在水平传动丝导轮的配合下,通过第二传动丝带动滑块沿水平方向运动;
17、滑块水平方向的运动拉动第三传动丝,第三传动丝带动连续体在设定方向做弯曲运动。
18、与现有技术相比,以上一个或多个技术方案存在以下有益效果:
19、1、减速机构利用第一传动丝将力矩传递给小变速轮,形成丝传动的单级减速,提高了传动机构的逆驱灵敏度,连续体驱动丝张力可直接反映为电机的电流变化,配合驱动电机内置的霍尔传感器,可实现旋转角度编码,能够在不增加拉力传感器情况下,实现连续体的力矩控制及连续体末端负载力的直接检测。
20、2、采用模块化设计,圆柱形的驱动装置支架上能够容纳多个驱动丝牵引模块,能够根据连续体不同需求,增加或减少相应数量的模块,实现驱动丝数量的改变,例如单段三线连续体驱动、单段四线连续体驱动及双段三线连续体等多种驱动模式,通过驱动模块的组合扩展可进一步实现多种多段连续体驱动形式。
21、3、通过滑块在水平方向的行程,控制第三传动丝拉动连续体的变化量,而滑块在水平方向的行程能够根据大变速轮和小变速轮之间的速比,结合驱动电机的旋转角度来确定,驱动电机则内置霍尔传感器,可实现旋转角度编码,从而对连续体实施力矩控制、速度控制和位置控制,控制精度高。
22、4、通过改变驱动丝牵引模块中的直径调节换向轮与垂直换向轮之间的间距,适应不同直径的连续体,能够方便的实现对各种直径、驱动丝数量的连续体的驱动。
技术特征:1.一种模块化丝传动连续体驱动装置,其特征在于,包括:
2.如权利要求1所述的一种模块化丝传动连续体驱动装置,其特征在于,所述驱动丝牵引模块设有驱动丝牵引模块支架,驱动丝牵引模块支架一端设有变速箱,变速箱内设有至少两组减速导轮,减速导轮通过导轮支撑杆与变速箱壳体连接,减速导轮绕导轮支撑杆转动且不沿杆滑动。
3.如权利要求2所述的一种模块化丝传动连续体驱动装置,其特征在于,所述变速箱壳体与驱动电机连接,驱动电机输出轴连接电机导轮,第一传动丝依次经过电机导轮、其中一组减速导轮、大变速轮和另一组减速导轮后,回到电机导轮,形成闭环的丝传动单级减速机构;大变速轮与小变速轮同轴布置且固定连接,大变速轮在第一传动丝的带动下,将驱动电机的力矩放大至小变速轮。
4.如权利要求1所述的一种模块化丝传动连续体驱动装置,其特征在于,所述驱动丝牵引模块支架上表面设有滑轨,滑轨上设有滑动连接的滑块,第二传动丝由滑块的一端引出后,经过小变速轮回到滑块的另一端,期间经过多组水平传动丝导轮,使小变速轮的转动在多组水平传动丝的带动下,带动滑块沿滑轨进行水平运动。
5.如权利要求2所述的一种模块化丝传动连续体驱动装置,其特征在于,所述驱动丝牵引模块支架另一端设有垂直换向轮,垂直换向轮下方空间设有直径调节换向轮,第三传动丝的一端与滑块连接,另一端依次经过垂直换向轮和直径调节换向轮后,与连续体末端圆盘连接。
6.如权利要求1所述的一种模块化丝传动连续体驱动装置,其特征在于,所述第三传动丝通过垂直换向轮和直径调节换向轮完成两次换向,滑块水平方向的运动转换为垂直方向后,再转换为水平方向的运动,利用滑块的水平方向运动水,向第三传动丝传递拉力。
7.如权利要求1所述的一种模块化丝传动连续体驱动装置,其特征在于,通过改变直径调节换向轮与垂直换向轮之间的间距,适应不同直径的连续体。
8.如权利要求1所述的一种模块化丝传动连续体驱动装置,其特征在于,所述连续体具有位于轴线位置的中心弹性杆,沿中心弹性杆方向等距离布置多个导线圆盘,各导线圆盘上周向均布穿孔,连续体未发生弯曲时各圆盘上的穿孔轴线共线,位于末端的导线圆盘的穿孔用于连接传动丝,位于首端的导线圆盘为连续体基座。
9.如权利要求1所述的一种模块化丝传动连续体驱动装置,其特征在于,所述驱动装置支架的其中一个端面上设有连续体固定孔,用于与连续体基座上的连续体快接导向柱配合,连续体快接导向柱上设有连续体固定销孔,通过插入轴销,实现连续体与驱动装置支架的快速装配。
10.基于权利要求1-9任一项所述模块化丝传动连续体驱动装置的工作方法,其特征在于,包括以下步骤:
技术总结本发明涉及一种模块化丝传动连续体驱动装置及工作方法,包括驱动装置支架,呈圆柱形,其中一个端面用于与连续体连接,圆周外侧均匀布置至少一组驱动丝牵引模块;驱动丝牵引模块,包括连接在驱动电输出轴上的电机导轮,电机导轮通过第一传动丝带动大变速轮转动,大变速轮同轴连接小变速轮,小变速轮通过第二传动丝带动滑块沿水平方向运动,滑块连接第三传动丝的一端,第三传动丝的另一端穿过连续体内部的穿孔并与连续体的末端圆盘连接。技术研发人员:类延强,张丽萍,杨宇坤,宋华健,杜付鑫,宋锐,李贻斌受保护的技术使用者:临沂大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/51937.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表