一种全向自动巡检机器人
- 国知局
- 2024-07-08 11:05:41
本技术涉及机器人领域,特别是涉及一种全向自动巡检机器人。
背景技术:
1、当前,大数据的浪潮席卷全球,巨大革新让人类科技从制造型向技术型进行转变,人机智能广泛应用于生产生活中,机器人产业呈现出迅猛发展的势头。特别是随着中国制造业的快速发展,提高生产效率、安全生产和降低人工成本对于制造业企业来说尤为重要,这使得制造业企业逐步形成对于机器人代替人工进行各项生产经营活动的迫切需求,机器人代替人工劳动将成为发展趋势。
2、针对环境差、风险高的工作环境,比如电气机房,其中的电气设备因为使用频繁或老化等原因经常容易存在一定的安全隐患,往往需要人工进行周期性巡检,但这种方式极大地限制了电气机房的工作效率,而且对巡检人员具有一定的风险性。
3、针对人工巡检环境差、风险高、效率低等问题,近年来通过巡检机器人替代人工巡检方式,可以有效解决人工巡检效率较低,人工成本较高且事故发生率高的缺点。然而目前的巡检机器人主要存在如下问题:主要为定轨巡检机器人,定轨巡检机器人进行巡检的区域必须安装轨道,整个机器人不够灵活;而且机器人达到目的地进行检测时,很难实现多方位的检测;另外,机器人没有设置额外的作业机构指导机器人作业。
技术实现思路
1、为解决现有技术的不足,本实用新型提供一种全向自动巡检机器人。
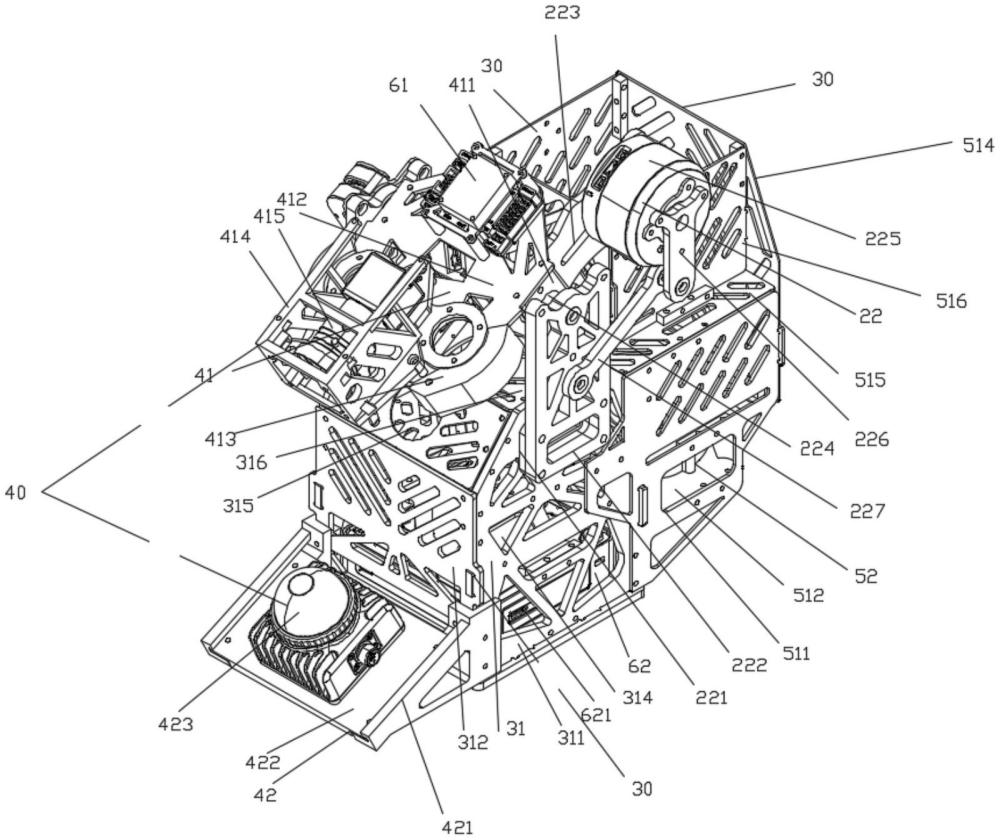
2、本实用新型是通过以下技术方案实现的:一种全向自动巡检机器人,包括底盘、云台转动机构和控制机构;所述底盘包括基座和轮组,所述基座包括第一顶板和与其相对设置的底板,所述轮组为多组,每组所述轮组固定在所述第一顶板和所述底板之间,多组所述轮组等间距分布;所述云台转动机构包括竖直轴转动模块,所述竖直轴转动模块包括第一电机安装架、第一电机、第一电机输出轴和云台底板,所述第一电机安装架安装在所述第一顶板的下表面,所述第一电机安装在所述第一电机安装架上,所述第一电机输出轴一端与所述第一电机连接,另一端穿过所述第一顶板的中心与所述云台底板连接;所述控制机构包括一控制器和通信模块,所述通信模块包括一minpc主机,所述控制器与所述minpc主机通信连接。
3、相对于现有技术,本实用新型所述的全向自动巡检机器人,通过使用独立悬挂的全向轮底盘使得机器人不需要转身就可以实现任一方向的移动,能够提高巡检效率并且保证巡检机器人的灵活性;同时通过在底盘上安装可多自由度转动的云台,使得设置在云台上的检测元件可以实现多方位的转动,从而使得机器人的检测覆盖的区域更加的全面和细致,提高了巡检效率;另外,通过一控制器和minipc之间的通信连接,可快速准确地获得机器人的位置和姿态并指导机器人相应的动作,使机器人更加智能化。
4、进一步地,所述轮组包括轮组驱动电机和全向轮,所述轮组驱动电机驱动与所述全向轮固定连接;每组所述轮组上的全向轮由独立的轮组驱动电机驱动,可通过控制每组的轮组驱动电机的转速和转向来控制每组全向轮的速度和方向,每组全向轮的速度和方向进行合成便是底盘的速度,进而实现机器人的全向移动。
5、进一步地,还包括电气机构,所述电气机构包括电气仓,所述电气仓包括电气仓侧板、电气仓前板和电气仓后板,所述电气仓侧板为两块且设置在所述云台底板的两端,所述电气仓前板和所述电气仓后板分别设置在两块所述电气仓侧板的前端和后端。所述电机机构用来放置所述minpc和电气元件,所述电气元件为设置在机器人上的各电机提供电源,保证机器人各部件之间的协同工作。
6、进一步地,所述云台转动机构还包括水平轴转动模块,所述水平轴转动模块包括第一安装板、第二安装板、水平轴、第二电机、主动连杆和传动连杆;所述第一安装板固定在一所述电气仓侧板上部的外侧,所述第二安装板与所述第一安装板平行设置,所述第二安装板一端通过所述水平轴与所述第一安装板的上部固定连接,另一端与所述第二电机固定连接,所述第二电机的另一端与所述主动连杆活动连接,所述主动连杆的另一端与所述第一安装板的中部活动连接。水平轴转动模块可以为设置在云台上的检测元件提供一个新的自由度的转动,从而使得检测元件的转动方向更广,机器人检测范围更全面。
7、进一步地,还包括一检测机构,所述检测机构包括传感器模块,所述传感器模块包括传感器支撑板、传感器安装板和检测元件,所述传感器支撑板固定安装在所述水平轴上,所述传感器安装板固定在所述传感器支撑板的上端,所述检测元件设置在所述传感器安装板上。所述传感器可以对周围环境进行检测,控制机构可以根据检测数据指导机器人进行相应的动作。
8、进一步地,所述检测机构还包括雷达模块,所述雷达模块包括雷达安装支架、雷达安装板和一激光雷达;所述雷达安装支架为两个分别固定在所述电气仓前板左右两端,雷达安装板固定安装在两个所述雷达安装支架上,所述激光雷达安装在所述雷达安装板的中部。通过设置一激光雷达可以在任意陌生机房环境内建立地图,根据建立的地图更好的实现机器人的定位,同时可以为机器人提供从当前位置到达目标位置的最优路线。
9、进一步地,还包括作业机构,所述作业机构包括储物仓,所述储物仓包括储物仓侧下板、储物仓固定板和储物仓后板,所述储物仓侧下板为两块,分别固定在两块所述电气仓侧板的后端,所述储物仓固定板设置在两块所述储物仓侧下板中下端,所述储物仓后板设置在两块所述储物仓侧下板的后端。所述储物仓用来放置储物传输驱动模块和放置一些根据作业任务所需的物料。
10、进一步地,所述作业机构还包括储物传输驱动模块,所述储物传输驱动模块安装在所述储物仓固定板上,所述储物传输驱动模块包括物料入管、传输电机和物料出管。所述储物传输驱动模块通过动力驱动将储物仓里的物料输出。
11、进一步地,所述作业机构还包储物传输模块,所述储物传输模块包括储物传输主管和储物传输弯管,所述储物传输主管一端与所述储物传输驱动模块的物料输出管连接,一端固定在未安装所述传动连杆的所述电气仓侧板上,并与所述储物传输弯管一端相通连接。用于传输从储物仓里泵出的物料到后面的输出模块。
12、进一步地,所述作业机构还包括一输出模块,所述传感器支撑板下端固定一作业安装板,所述输出模块设置在所述作业安装板上。用于将所述储物传输模块传送过来的物料输出到外界环境中的相应位置。
13、为了更好地理解和实施,下面结合附图详细说明本实用新型。
技术特征:1.一种全向自动巡检机器人,其特征在于:包括底盘、云台转动机构和控制机构;所述底盘包括基座和轮组,所述基座包括第一顶板和与其相对设置的底板,所述轮组为多组,每组所述轮组固定在所述第一顶板和所述底板之间,多组所述轮组等间距分布;所述云台转动机构包括竖直轴转动模块,所述竖直轴转动模块包括第一电机安装架、第一电机、第一电机输出轴和云台底板,所述第一电机安装架安装在所述第一顶板的下表面,所述第一电机安装在所述第一电机安装架上,所述第一电机输出轴一端与所述第一电机连接,另一端穿过所述第一顶板的中心与所述云台底板连接;所述控制机构包括一控制器和通信模块,所述通信模块包括一minpc主机,所述控制器与所述minpc主机通信连接。
2.根据权利要求1所述的一种全向自动巡检机器人,其特征在于:所述轮组包括轮组驱动电机和全向轮,所述轮组驱动电机与所述全向轮固定连接。
3.根据权利要求2所述的一种全向自动巡检机器人,其特征在于:还包括电气机构,所述电气机构包括电气仓,所述电气仓包括电气仓侧板、电气仓前板和电气仓后板,所述电气仓侧板为两块且设置在所述云台底板的两端,所述电气仓前板和所述电气仓后板分别设置在两块所述电气仓侧板的前端和后端。
4.根据权利要求3所述的一种全向自动巡检机器人,其特征在于:所述云台转动机构还包括水平轴转动模块,所述水平轴转动模块包括第一安装板、第二安装板、水平轴、第二电机、主动连杆和传动连杆;所述第一安装板固定在一所述电气仓侧板上部的外侧,所述第二安装板与所述第一安装板平行设置,所述第二安装板一端通过所述水平轴与所述第一安装板的上部固定连接,另一端与所述第二电机固定连接,所述第二电机的另一端与所述主动连杆活动连接,所述主动连杆的另一端与所述第一安装板的中部活动连接。
5.根据权利要求4所述的一种全向自动巡检机器人,其特征在于:还包括一检测机构,所述检测机构包括传感器模块,所述传感器模块包括传感器支撑板、传感器安装板和检测元件,所述传感器支撑板固定安装在所述水平轴上,所述传感器安装板固定在所述传感器支撑板的上端,所述检测元件设置在所述传感器安装板上。
6.根据权利要求5所述的一种全向自动巡检机器人,其特征在于:所述检测机构还包括雷达模块,所述雷达模块包括雷达安装支架、雷达安装板和一激光雷达;所述雷达安装支架为两个分别固定在所述电气仓前板左右两端,所述雷达安装板固定安装在两个所述雷达安装支架上,所述激光雷达安装在所述雷达安装板的中部。
7.根据权利要求6所述的一种全向自动巡检机器人,其特征在于:还包括作业机构,所述作业机构包括储物仓,所述储物仓包括储物仓侧下板、储物仓固定板和储物仓后板,所述储物仓侧下板为两块,分别固定在两块所述电气仓侧板的后端,所述储物仓固定板设置在两块所述储物仓侧下板中下端,所述储物仓后板设置在两块所述储物仓侧下板的后端。
8.根据权利要求7所述的一种全向自动巡检机器人,其特征在于:所述作业机构还包括储物传输驱动模块,所述储物传输驱动模块安装在所述储物仓固定板上,所述储物传输驱动模块包括物料入管、传输电机和物料出管。
9.根据权利要求8所述的一种全向自动巡检机器人,其特征在于:所述作业机构还包储物传输模块,所述储物传输模块包括储物传输主管和储物传输弯管,所述储物传输主管一端与所述储物传输驱动模块的物料输出管连接,一端固定在未安装所述传动连杆的所述电气仓侧板上,并与所述储物传输弯管一端相通连接。
10.根据权利要求9所述的一种全向自动巡检机器人,其特征在于:所述作业机构还包括一输出模块,所述传感器支撑板下端固定一作业安装板,所述输出模块设置在所述作业安装板上。
技术总结本技术涉及一种全向自动巡检机器人包括底盘、云台转动机构和控制机构;底盘包括基座和轮组,基座包括第一顶板和底板,轮组固定在第一顶板和底板之间;云台转动机构包括竖直轴转动模块,竖直轴转动模块包括第一电机安装架、第一电机、第一电机输出轴和云台底板,第一电机安装架安装在第一顶板下表面,第一电机安装在第一电机安装架上,第一电机输出轴一端与第一电机连接,另一端穿过第一顶板与云台底板连接;控制机构包括控制器和通信模块,通信模块包括minPC主机,控制器与minPC主机通信连接。本技术所述巡检机器人,在不需要转身的情况下可实现任意方向移动,巡检效率高且灵活性强,采用多自由度云台可获得更广的检测范围,且智能化程度高。技术研发人员:张闻悦,张子熠,朱颖,李宇浩,蒋荣桀受保护的技术使用者:华南师范大学技术研发日:20231120技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/51990.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表