清扫车作业控制方法、系统及清扫车与流程
- 国知局
- 2024-07-09 16:39:00
本发明涉及车辆清扫控制,具体为清扫车作业控制方法、系统及清扫车。
背景技术:
1、清扫车作业控制方法、系统及清扫车是一种使用自动化技术和人工智能算法来自主地执行垃圾清理任务的车辆。它利用各种传感器(如激光雷达、摄像头和红外线传感器)来感知周围环境,并使用实时数据处理和决策系统来规划行进路径和执行清理操作。清扫车作业控制方法、系统及清扫车的应用有助于提高垃圾清理效率、降低人力成本,并减少环境污染。
2、现有专利文献中,一份公布号为cn 113848917 a,专利名称为“清扫车作业控制方法、系统及清扫车”的专利,该专利中主要依靠感知及定位传感技术在路面上自动行驶并完成清扫,但是,其在自动行驶的过程中,特别是受到来往车辆或行人的影响,其无法保障百分百的行驶安全性,而且其工作时还会占用道路上一定的区域,也会干涉来往的车辆或行人。
3、因此,鉴于上述方案于实际制作及实施使用上的缺失之处,而加以修正、改良,同时本着求好的精神及理念,并由专业的知识、经验的辅助,以及在多方巧思、试验后,方创设出本发明,特提供清扫车作业控制方法、系统及清扫车,用于解决上述的问题。
技术实现思路
1、本发明提出清扫车作业控制方法、系统及清扫车,解决了现有技术中的问题。
2、本发明的技术方案是这样实现的:
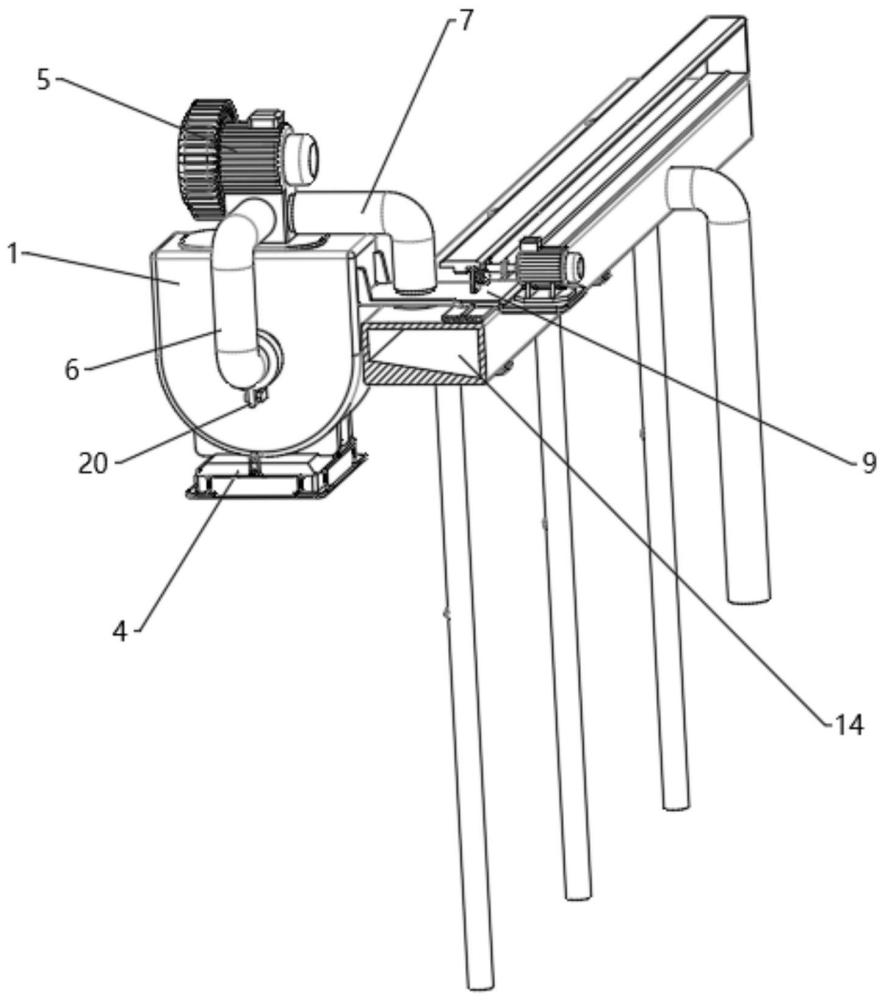
3、一种清扫车,包括清扫车架,清扫车架的内部安装有吸尘筒,吸尘筒通过吸尘布袋固定连接有吸尘盒,清扫车架的上方安装有吸尘风机,吸尘风机分别连接有管道一和管道二,管道一与吸尘筒相对接;清扫车架的外侧壁上安装有驱动吸尘筒旋转的电机一,吸尘筒旋转时能够卷收吸尘布袋并带动吸尘盒升降,清扫车架的外侧壁上还固定连接有滑座,管道二对接于滑座上,滑座滑动连接于滑轨上,滑座上安装有齿轮,滑轨内固定有与齿轮啮合传动的齿排,齿轮由安装在滑座上的电机二驱动旋转,滑轨的底部固定连接有垃圾滑道,垃圾滑道的底部固定有多处均匀分布的支撑柱。
4、采用此方案,将清扫车架悬挂驱动,在清扫时,选择就近的位置降落吸尘盒,通过清扫盒能够将此区域内的垃圾吸入至垃圾滑道内暂时储存,相较于现有的无人清扫车,该清扫车悬挂于空中,在清扫时几乎不会干涉到在路面上正常行驶的车辆和行人,在清扫时会更加安全。
5、作为清扫车优选的实施方式,管道一与吸尘筒之间限位连接有防转装置,防转装置的一端与吸尘筒滑道连接,防转装置的另一端与管道一固定连接。
6、采用此方案,为了避免管道一跟随吸尘筒一同旋转,通过设置防转装置,吸尘筒在旋转时实现吸尘盒升降的过程中,并不会引起管道一的转动。
7、作为清扫车优选的实施方式,防转装置通过两处以上的环形圆轨与吸尘筒滑动接触,且每相邻两处环形圆轨之间还固定有位于防转装置内壁上的密封圈,密封圈与吸尘筒的外侧壁相接触。
8、采用此方案,为了提升防转装置连接的密封性,通过设置更多数量的环形圆轨滑动接触,以此提升密封性;为了进一步再提升密封性,再设置密封圈,以此加强密封效果。
9、作为清扫车优选的实施方式,吸尘盒的四周均开设有吸尘口,其吸尘口处活动安装有侧挡板,侧挡板的两端滑动连接于固定在吸尘盒外的导向轴上,导向轴上装套有推动侧挡板始终向下的弹簧。
10、采用此方案,为了方便垃圾的吸入,在吸尘盒的四周均开设吸尘口,并通过侧挡板封堵,在吸尘时,可就近开启对应的侧挡板,从此吸尘口处将垃圾进行快速清理,无需再通过旋转吸尘盒来调节吸尘方向,在应用时更加便捷且省力。
11、作为清扫车优选的实施方式,侧挡板的上方固定有挂环,吸尘盒的外部固定有能够与挂环相配合的活动式挂钩,挂环与活动式挂钩配合时,吸尘口能够完全开启。
12、采用此方案,为了保持侧挡板的持续开启,在开启时将挂环与活动式挂钩配合,即可保证吸尘口能够完全开启。
13、作为清扫车优选的实施方式,清扫车架的底部固定连接有防偏挡块,吸尘盒的外部开设有防偏限位槽,防偏挡块能够限位装配于防偏限位槽内。
14、采用此方案,为了保证吸尘盒上升后防止偏转,清扫车架上升后,防偏挡块能够限位装配于防偏限位槽内,此时能够避免清扫车架在控制出现偏转或晃动等情况。
15、作为清扫车优选的实施方式,垃圾滑道的侧壁上连接有至少一处排放管,垃圾滑道的内腔底部倾斜设置,其斜面向排放管所在处降低。
16、采用此方案,为了方便垃圾滑道内的垃圾的处理,通过设置排放管,可以在排放管处放置垃圾箱,垃圾滑道内的垃圾会沿排放管下落至垃圾箱内。
17、一种清扫车作业控制系统,在清扫车中的支撑柱的侧壁上设置有清扫开关,垃圾滑道的上方开设有与支撑柱数量相等的注入口,注入口与支撑柱位于同一垂线上,电机二上电性连接有控制单元,控制单元与所有清扫开关电性连接;
18、吸尘盒的上方设置有开关组件,电机一的上方电性连接有控制部件,其中控制部件为指令寄存器,其内部寄存有控制电机一正向、反向旋转的程序,控制部件分别与开关组件、控制单元电性连接;
19、开关组件包括开关一和开关二,其中开关一启动后由电机二控制吸尘盒上升,其中开关二启动后由控制单元控制吸尘风机的开启或关闭。
20、控制单元主要包括中央处理器、单片机和矢量计算模块,单片机内寄存有电机二驱动滑座移动的最小距离单位x,x为相邻两支撑柱之间的间距;
21、矢量计算模块对所有支撑柱上的清扫开关依次按顺序排号为n,n=1、2、3...,并设定由1至2为正方向,由2至1为负方向,每次滑座移动时的矢量作差为δn,δn=n1-n0,在单片机和矢量计算模块共同控制下的滑座的位移为s,s=δn*x。
22、采用此方案,由该系统控制清扫时,该清扫车始终悬挂于空中,仅吸尘盒进行升降,由于吸尘盒体积较小,因此,在清扫时几乎不会干涉到在路面上正常行驶的车辆和行人,使得在清扫时会更加安全。
23、一种清扫车作业控制方法,按清扫车作业控制系统来控制该清扫车,其具体的控制步骤如下:
24、s1、根据垃圾的所在位置,就近按下支撑柱上的清扫开关,由控制单元向电机二发出控制信号,通过电机二驱动滑座移动至该支撑柱的正上方;
25、s2、随后,由控制单元向控制部件发出控制信号,由控制部件启动电机一正向旋转,由电机一带动吸尘筒正向旋转;
26、s3、此时吸尘布袋逐渐伸展,吸尘盒自动下落;
27、s4、根据垃圾的所在方位,开启对应方位处的侧挡板,并将挂环与活动式挂钩配合,即可保证吸尘口持续性开启;
28、s5、按下开关组件中的开关二,可开启吸尘风机,通过吸尘风机将垃圾吸入吸尘盒内,然后垃圾依次沿吸尘布袋、吸尘筒、管道一、管道二进入至垃圾滑道内,然后垃圾沿排放管下落至垃圾箱内;
29、s6、再次按下开关组件中的开关二,可关闭吸尘风机,再按下开关一,由控制部件启动电机一反向旋转,由电机一带动吸尘筒反向旋转;
30、s7、此时吸尘布袋逐渐卷收,吸尘盒自动上升。
31、采用了上述技术方案后,本发明的有益效果是:
32、1、将清扫车架悬挂驱动,在清扫时,选择就近的位置降落吸尘盒,通过清扫盒能够将此区域内的垃圾吸入至垃圾滑道内暂时储存,该清扫车无需人工驾驶,在应用时自动化程度较高。
33、2、为了避免管道一跟随吸尘筒一同旋转,通过设置防转装置,吸尘筒在旋转时实现吸尘盒升降的过程中,并不会引起管道一的转动;为了提升防转装置连接的密封性,通过设置更多数量的环形圆轨滑动接触,以此提升密封性;为了进一步再提升密封性,再设置密封圈,以此加强密封效果。
34、3、为了方便垃圾的吸入,在吸尘盒的四周均开设吸尘口,并通过侧挡板封堵,在吸尘时,可就近开启对应的侧挡板,从此吸尘口处将垃圾进行快速清理,无需再通过旋转吸尘盒来调节吸尘方向,在应用时更加便捷且省力。
35、4、由该系统控制清扫时,该清扫车始终悬挂于空中,仅吸尘盒进行升降,由于吸尘盒体积较小,因此,在清扫时几乎不会干涉到在路面上正常行驶的车辆和行人,使得在清扫时会更加安全。
本文地址:https://www.jishuxx.com/zhuanli/20240617/54118.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表