一种自适应焊缝识别跟踪激光-电弧复合焊接装置的制作方法
- 国知局
- 2024-06-20 16:41:46
本技术属于焊接加工,特别是涉及一种自适应焊缝识别跟踪激光-电弧复合焊接装置。
背景技术:
1、激光-电弧复合焊接技术是一种优质、高效的多热源复合焊接技术。传统弧焊具有设备成本低、液态金属搭桥能力强、应用范围广、设备操作简单等优点,但是弧焊也同时存在焊接速度慢、效率低、焊后变形大等诸多不足;激光焊则具有焊接速度快、焊后变形和残余应力小、深熔焊焊缝的深宽比大、焊接热影响区狭窄、易于实现自动化等诸多优点。但是,激光焊也存在对工件坡口装配要求高、焊接铝和铜的能量损失大等缺点。因此,传统弧焊和激光焊的这些缺点都制约着他们的大规模推广和应用。
2、激光-电弧复合焊是将激光焊和弧焊两种热源的能量通过复合的方式共同作用于工件产生同一个焊接熔池,并通过二者的耦合作用来实现材料的优质高效连接的一种焊接方法。激光-电弧复合焊同时兼具激光焊和弧焊的优点,而又相互弥补双方的缺点,以获得高速稳定的焊接过程,是一种极具应用前景的先进焊接工艺方法。
3、传统的激光-电弧复合焊接设备主要应用在易于实现熔池监控和观察的工作场景,而需要高空作业的位置或者密闭空间位置的一些特殊焊接结构则往往无法实现熔池的有效监控,从而无法保证焊接接头质量。
技术实现思路
1、有鉴于此,本实用新型旨在提出一种自适应焊缝识别跟踪激光-电弧复合焊接装置,以解决传统的激光-电弧复合焊接无法对熔池进行有效监控的问题。
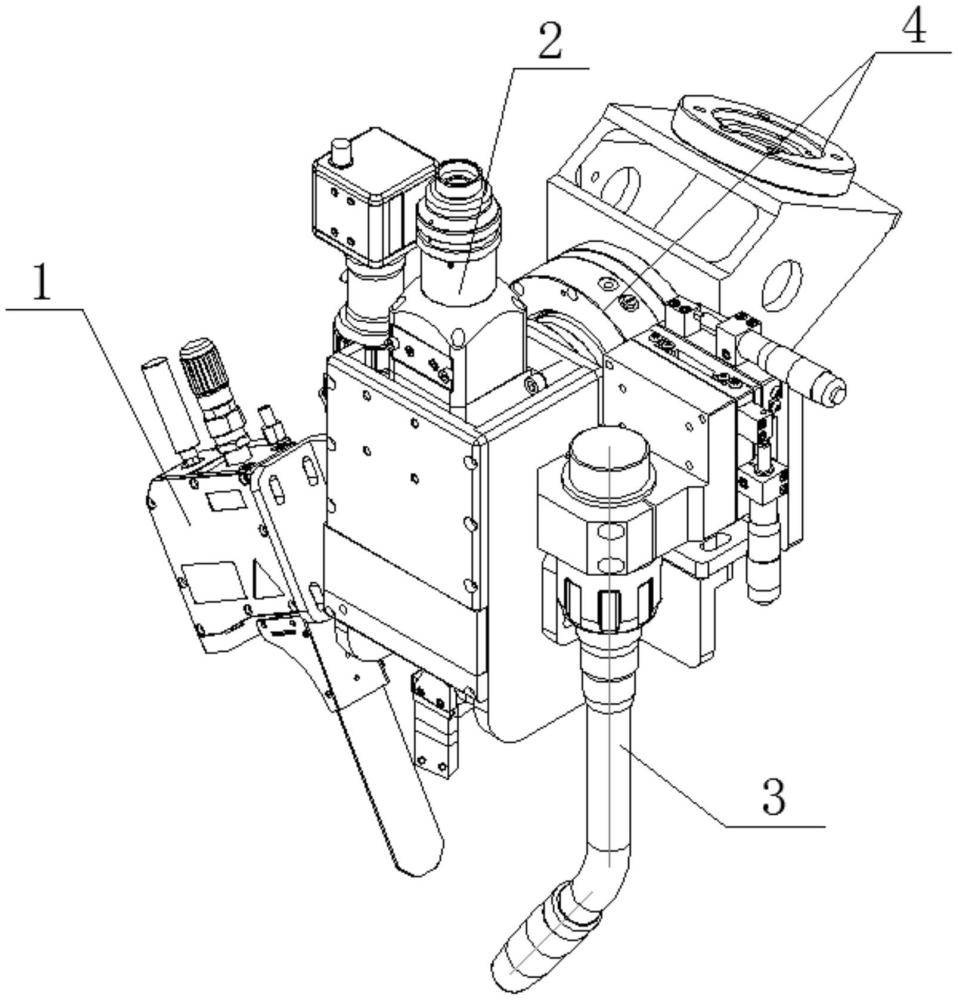
2、为实现上述目的,本实用新型采用以下技术方案:一种自适应焊缝识别跟踪激光-电弧复合焊接装置,所述复合焊接装置包括焊缝跟踪机构、激光枪头和弧焊枪头,所述激光枪头竖直设置,所述焊缝跟踪机构和弧焊枪头分别设置在激光枪头的两侧,所述焊缝跟踪机构中的识别光路与激光枪头之间的夹角为36.5°,所述弧焊枪头中的焊丝与激光枪头之间的夹角为36.5°。
3、更进一步的,所述焊缝跟踪机构包括激光发射器和图像识别机构,所述激光发射器和图像识别机构分别设置在焊缝的两侧。
4、更进一步的,所述图像识别机构前端设置有透镜。
5、更进一步的,所述图像识别机构为ccd相机或cmos传感器。
6、更进一步的,所述复合焊接装置设置在焊接机器人上。
7、更进一步的,所述焊接机器人包括机器人本体和机器人底座,所述复合焊接装置设置在机器人本体上,所述机器人本体下端与机器人底座相连。
8、更进一步的,所述机器人底座与移动平台相连。
9、更进一步的,所述移动平台上设置有焊接翻转台。
10、更进一步的,所述复合焊接装置与机器人本体之间设置有防碰撞器。
11、更进一步的,所述焊接机器人为8轴机器人。
12、与现有技术相比,本实用新型的有益效果是:本实用新型是一种可以自适应焊缝识别跟踪激光-电弧复合装置,可以进一步扩大激光-电弧复合焊接技术的应用领域及范围。通过合理的空间位置设置既可以避免相互发生物理干涉,也可以有效保证焊缝识别、熔池跟踪反馈、激光与电弧的共熔池、熔池与焊丝容易实现液桥过渡模式,从而保证焊接效率与质量。
技术特征:1.一种自适应焊缝识别跟踪激光-电弧复合焊接装置,其特征在于:所述复合焊接装置包括焊缝跟踪机构(1)、激光枪头(2)和弧焊枪头(3),所述激光枪头(2)竖直设置,所述焊缝跟踪机构(1)和弧焊枪头(3)分别设置在激光枪头(2)的两侧,所述焊缝跟踪机构(1)中的识别光路与激光枪头(2)之间的夹角为36.5°,所述弧焊枪头(3)中的焊丝(5)与激光枪头(2)之间的夹角为36.5°。
2.根据权利要求1所述的一种自适应焊缝识别跟踪激光-电弧复合焊接装置,其特征在于:所述焊缝跟踪机构(1)包括激光发射器(10)和图像识别机构(11),所述激光发射器(10)和图像识别机构(11)分别设置在焊缝(13)的两侧。
3.根据权利要求2所述的一种自适应焊缝识别跟踪激光-电弧复合焊接装置,其特征在于:所述图像识别机构(11)前端设置有透镜(12)。
4.根据权利要求2所述的一种自适应焊缝识别跟踪激光-电弧复合焊接装置,其特征在于:所述图像识别机构(11)为ccd相机或cmos传感器。
5.根据权利要求1所述的一种自适应焊缝识别跟踪激光-电弧复合焊接装置,其特征在于:所述复合焊接装置设置在焊接机器人上。
6.根据权利要求5所述的一种自适应焊缝识别跟踪激光-电弧复合焊接装置,其特征在于:所述焊接机器人包括机器人本体(6)和机器人底座(7),所述复合焊接装置设置在机器人本体(6)上,所述机器人本体(6)下端与机器人底座(7)相连。
7.根据权利要求6所述的一种自适应焊缝识别跟踪激光-电弧复合焊接装置,其特征在于:所述机器人底座(7)与移动平台(9)相连。
8.根据权利要求7所述的一种自适应焊缝识别跟踪激光-电弧复合焊接装置,其特征在于:所述移动平台(9)上设置有焊接翻转台(8)。
9.根据权利要求6所述的一种自适应焊缝识别跟踪激光-电弧复合焊接装置,其特征在于:所述复合焊接装置与机器人本体(6)之间设置有防碰撞器(4)。
10.根据权利要求6所述的一种自适应焊缝识别跟踪激光-电弧复合焊接装置,其特征在于:所述焊接机器人为8轴机器人。
技术总结本技术提出了一种自适应焊缝识别跟踪激光‑电弧复合焊接装置,属于焊接加工技术领域。解决了传统的激光‑电弧复合焊接无法对熔池进行有效监控的问题。它包括焊缝跟踪机构、激光枪头和弧焊枪头,所述激光枪头竖直设置,所述焊缝跟踪机构和弧焊枪头分别设置在激光枪头的两侧,所述焊缝跟踪机构中的识别光路与激光枪头之间的夹角为36.5°,所述弧焊枪头中的焊丝与激光枪头之间的夹角为36.5°。它主要用于自适应焊缝识别跟踪。技术研发人员:方乃文,朱闯,林晓辉,武鹏博,于春洋,孙徕博,吴妍,李爱民受保护的技术使用者:中国机械总院集团哈尔滨焊接研究所有限公司技术研发日:20231010技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240618/14069.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表