一种具有智能清理功能的电池片焊接用工业机器人的制作方法
- 国知局
- 2024-06-20 16:42:56
本发明涉及电池片焊接机械手,具体为一种具有智能清理功能的电池片焊接用工业机器人。
背景技术:
1、随着社会的不断进步,对环境污染的问题越来越重视,而二氧化碳的大量排放是造成温室效应的重要原因之一,太阳能作为一种清洁能源,其大规模使用能够有效减少碳排放,太阳能作为一种低碳可再生能源,与常规能源相比,其使用方便且成本低廉,太阳能光伏组件用于把太阳能直接转换为电能,光伏组件在日常生活中,能够将太阳能转换为电能,大大减少能源的消耗,目前光伏组件正在逐渐被普及使用,为用电设备供电或者向电网传送电能,在光伏组件的生产过程中,太阳能电池板由电池片拼接而成,而电池片是光伏板中最重要的转换元件,为了增大受光照面积、提高光电转换效率,光伏板一般做得越大越好,这也就意味着需要将更多的电池片焊接成一块整体,因此需要将相邻两块电池片的电极相连接,要通过焊带将相邻两块电池片进行焊接。
2、现有的电池片焊接用工业机器人在使用时,由于焊接所产生的焊烟及焊渣会附着在工业机器人的机械手上,且现有的机械手不具备智能清理功能,导致机械手被侵蚀,会影响机械手的使用寿命。
技术实现思路
1、本发明的目的在于提供一种具有智能清理功能的电池片焊接用工业机器人,以解决上述背景技术中提出的问题。
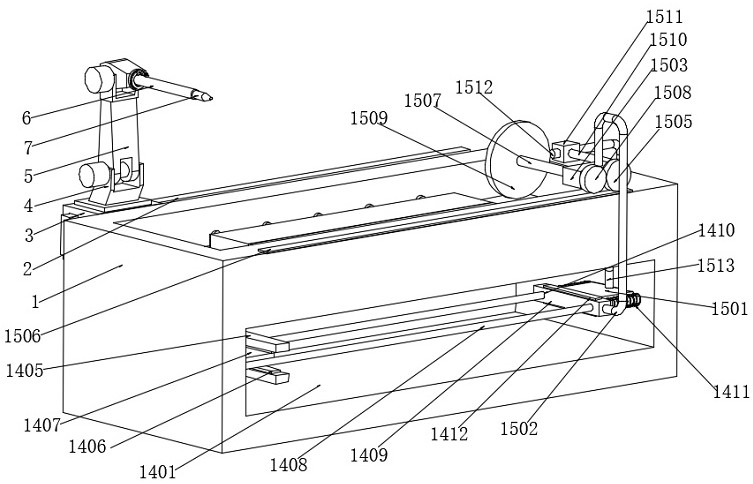
2、为了解决上述技术问题,本发明提供如下技术方案:一种具有智能清理功能的电池片焊接用工业机器人,该具有智能清理功能的电池片焊接用工业机器人包括台体,所述台体上安装有模组滑轨,所述模组滑轨上滑动安装有移动座,所述移动座上安装有底座,所述底座上安装有机械大臂,所述机械大臂上安装有机械小臂,所述机械小臂上安装有焊枪头,所述机械小臂上安装有模组环轨,所述模组环轨上滑动安装有滑座,所述滑座上安装有电动伸缩杆,所述电动伸缩杆上安装有连接块,所述连接块上安装有清洁垫,且连接块上安装有焊烟传感器,当需要对台体上的电池片进行焊接时,通过机械大臂和机械小臂所组成的机械手能够控制焊枪头调整至连接处,再通过运行模组滑轨,使移动座带动焊枪头能够沿着连接处进行焊接,与此同时,当焊烟传感器检测到焊烟产生时,焊烟传感器可以控制模组环轨运行,使滑座可以通过电动伸缩杆带动清洁垫绕着机械小臂进行圆周清理,再通过运行电动伸缩杆可以带动清洁垫沿着机械小臂进行擦拭清理,从而能够实现在焊接过程中对机械手的智能清理。
3、作为优选技术方案,所述焊烟传感器与模组环轨电性连接,当焊烟传感器检测到焊烟时,模组环轨控制滑座进行圆周轨迹移动,方便滑座带动清洁垫对机械小臂进行全面清理。
4、作为优选技术方案,所述台体上设置有轨迹一级利用组件和轨迹二级利用组件,通过移动座的移动轨迹为轨迹一级利用组件和轨迹二级利用组件提供运行驱动力。
5、作为优选技术方案,所述轨迹一级利用组件包括工作室、滑道、滑块、联动杆、叉形板、第一磁力块、固定杆、滑板、滑孔和第二磁力块;
6、所述台体上设有工作室,所述工作室靠近模组滑轨的一侧开设有滑道,所述滑道内滑动安装有滑块,所述滑块与移动座通过联动杆相连接,所述滑块远离联动杆的一侧安装有叉形板,所述叉形板的叉口上对称安装有第一磁力块,所述工作室内固定安装有固定杆,所述固定杆上安装有滑板,所述滑板上开设有滑孔,所述固定杆贯穿滑孔,且为滑动配合,所述滑板上对称安装有第二磁力块,当移动座沿着模组滑轨移动至最远处时,移动座在移动过程中可以通过联动杆带动滑块在滑道内进行同步移动,从而让滑块可以带动叉形板移动至滑板处,使得第一磁力块和第二磁力块相互吸附固定,此时,在移动座沿着模组滑轨进行复位时,叉形板可以带动滑板沿着固定杆进行同步移动。
7、作为优选技术方案,所述第一磁力块与第二磁力块相接触时,在异性磁场作用下相互吸附,所述工作室内安装有推板,所述滑板与工作室通过连接弹簧相连接,初始状态下,所述推板处于叉形板的叉口内,当叉形板带动滑板进行移动时,滑板能够在移动过程中拉伸连接弹簧,当叉形板到达初始位置时,滑板能够在推板的作用下从叉形板中拖出,从而让第一磁力块和第二磁力块脱离,使得滑板可以在连接弹簧的作用下进行复位,进而能够实现滑板的往复移动。
8、作为优选技术方案,所述轨迹二级利用组件包括传动杆、传动板、第一转轴、传动齿、齿板、第二转轴、从动齿和磨轮;
9、所述滑板上安装有传动杆,所述传动杆上安装有传动板,所述传动板上转动安装有第一转轴,所述第一转轴上安装有传动齿,所述台体的台面上安装有齿板,所述齿板与传动齿相啮合,所述传动板上转动安装有第二转轴,所述第二转轴靠近传动齿的端部安装有从动齿,所述从动齿与传动齿相啮合,所述第二转轴的另一端安装有磨轮,当滑板进行移动时,滑板可以通过传动杆带动传动板进行同步位移,利用传动板的位移,在传动齿与齿板所形成的齿轮齿条配合作用下,让传动齿可以驱动从动齿进行旋转,从而使从动齿通过第二转轴带动磨轮进行同步旋转,方便磨轮对焊缝进行打磨,从而能够将焊缝上的焊渣去除。
10、作为优选技术方案,所述磨轮与电池片焊缝处于同一轴线上,在传动板进行移动时,磨轮进行顺时针转动,当传动板进行复位时,磨轮进行逆时针转动,利用传动板的移动方向和磨轮的旋转方向的“同向”运动,能够提高磨轮对焊缝的打磨效果。
11、作为优选技术方案,所述轨迹二级利用组件还包括气囊、连接杆、排气管、喷头和气管;
12、所述滑板与工作室通过气囊相连接,所述传动板上安装有连接杆,所述连接杆上安装有排气管,所述排气管的输入端与气囊通过气管相连接,所述排气管的输出端上安装有喷头,当滑板进行移动时,滑板可以拉伸气囊,使气囊吸入外界的气流,当滑板进行复位时,滑板可以在连接弹簧的带动下挤压气囊,使挤压气囊内的气体可以通过气管进入到排气管内,方便排气管通过喷头喷射气流,利用喷射气流对磨轮进行清理,从而可以保障磨轮的打磨效果。
13、作为优选技术方案,所述气囊的输入端上安装有单向气阀,所述气管为单向软管,方便气囊内的气流进行定向流动,保障排气管的排气效果。
14、作为优选技术方案,台体的台面上开设有置物槽,所述置物槽内对称安装有两组电动顶杆,两组所述电动顶杆上安装有夹紧板,通过启动电动顶杆带动夹紧板夹紧固定电池片,能够保障电池片在焊接过程中的稳定。
15、与现有技术相比,本发明所达到的有益效果是:
16、当需要对台体上的电池片进行焊接时,通过机械大臂和机械小臂所组成的机械手能够控制焊枪头调整至连接处,再通过运行模组滑轨,使移动座带动焊枪头能够沿着连接处进行焊接,与此同时,当焊烟传感器检测到焊烟产生时,焊烟传感器可以控制模组环轨运行,使滑座可以通过电动伸缩杆带动清洁垫绕着机械小臂进行圆周清理,再通过运行电动伸缩杆可以带动清洁垫沿着机械小臂进行擦拭清理,从而能够实现在焊接过程中对机械手的智能清理。
17、当叉形板带动滑板进行移动时,滑板能够在移动过程中拉伸连接弹簧,当叉形板到达初始位置时,滑板能够在推板的作用下从叉形板中拖出,从而让第一磁力块和第二磁力块脱离,使得滑板可以在连接弹簧的作用下进行复位,进而能够实现滑板的往复移动,方便为轨迹二级利用组件进行运行驱动力。
18、当滑板进行移动时,滑板可以通过传动杆带动传动板进行同步位移,利用传动板的位移,在传动齿与齿板所形成的齿轮齿条配合作用下,让传动齿可以驱动从动齿进行旋转,从而使从动齿通过第二转轴带动磨轮进行同步旋转,方便磨轮对焊缝进行打磨,从而能够将焊缝上的焊渣去除。
本文地址:https://www.jishuxx.com/zhuanli/20240618/14107.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。