一种车架焊接生产线的制作方法
- 国知局
- 2024-06-21 09:35:35
本申请涉及电动车,具体而言,涉及一种车架焊接生产线。
背景技术:
1、电动自行车已经作为日常交通工具被消费者广泛使用,电动自行车的车架是整个车辆的支撑和固定部件,也是连接和承载其他零部件的重要部件,由多根管件和多个钣金件组合焊接而成。
2、电动自行车的车架的焊接生产是电动自行车制造过程中的重要环节之一,现有的车架通常是由机器人焊接和人工焊接配合完成。具体的,由于机器人焊接角度受限,有些位置机器人机械臂会与车架或工装干涉无法焊接,需要人工补焊,在人工补焊时,翻转、传递车架时容易造成车架表面划伤,最后还需要增加打磨工序。
技术实现思路
1、本申请的目的在于,针对上述现有技术中的不足,提供一种车架焊接生产线。
2、为实现上述目的,本申请实施例采用的技术方案如下:
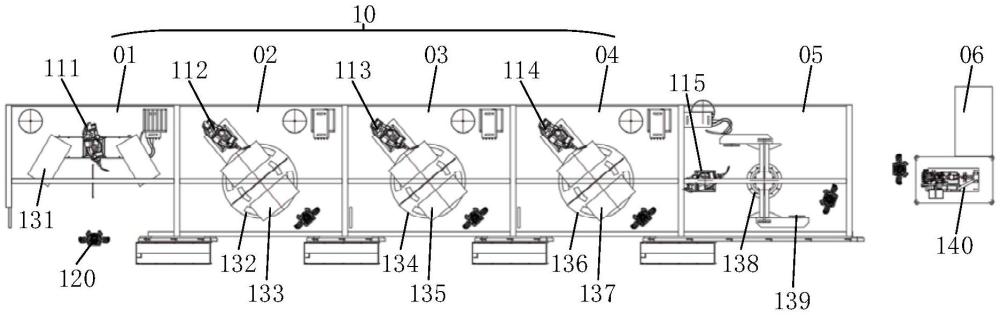
3、本申请实施例的一方面,提供一种车架焊接生产线,包括依工序顺次排布的焊接工位和补焊工位,在焊接工位设置有焊接机器人组,焊接机器人组用于焊接形成车架主体,在补焊工位设置有补焊机器人和补焊变位机构,补焊变位机构包括补焊回转基座以及转动设置于补焊回转基座上的多个补焊工作台,补焊工作台用于放置车架主体,补焊工作台的转动轴与补焊回转基座的转动轴垂直。
4、可选的,焊接工位包括第一焊接工位,焊接机器人组包括位于第一焊接工位的第一焊接机器人和两个第一焊接工作台,两个第一焊接工作台分布于第一焊接机器人的相对两侧,第一焊接机器人于两个第一焊接工作台之间交替焊接,并在第一焊接工作台上焊接形成前梁管组件。
5、可选的,焊接工位包括第二焊接工位,焊接机器人组包括位于第二焊接工位的第二焊接机器人和第二焊接变位机构,第二焊接变位机构包括第二回转基座以及设置于第二回转基座上的两个第二焊接工作台,第二回转基座受驱转动,以使两个第二焊接工作台交替位于第二焊接机器人的焊接区域,第二焊接机器人于第二焊接工作台上焊接形成整车框架。
6、可选的,焊接工位包括第三焊接工位,焊接机器人组包括位于第三焊接工位的第三焊接机器人和第三焊接变位机构,第三焊接变位机构包括第三回转基座以及设置于第三回转基座上的两个第三焊接工作台,第三回转基座受驱转动,以使两个第三焊接工作台交替位于第三焊接机器人的焊接区域,第三焊接机器人于第三焊接工作台上在整车框架上焊接正面配件。
7、可选的,焊接工位包括第四焊接工位,焊接机器人组包括位于第四焊接工位的第四焊接机器人和第四焊接变位机构,第四焊接变位机构包括第四回转基座以及设置于第四回转基座上的两个第四焊接工作台,第四回转基座受驱转动,以使两个第四焊接工作台交替位于第四焊接机器人的焊接区域,第四焊接机器人于第四焊接工作台上在整车框架上焊接背面配件以形成车架主体。
8、可选的,车架焊接生产线还包括依工序排布于补焊工位之后的矫正工位,在矫正工位内设置有矫正工作台,在矫正工作台上设置有用于矫正车架的矫正工装。
9、可选的,在第二回转基座上设置有位于两个第二焊接工作台之间的第一隔断板;在第三回转基座上设置有位于两个第三焊接工作台之间的第二隔断板;第四回转基座上的两个第四焊接工作台之间的第三隔断板。
10、可选的,第一焊接工位、第二焊接工位、第三焊接工位、第四焊接工位和补焊工位呈线性排布。
11、可选的,车架焊接生产线还包括流转于第一焊接工位、第二焊接工位、第三焊接工位、第四焊接工位和补焊工位之间的传输机构。
12、可选的,补焊机器人具有多轴机械臂。
13、本申请的有益效果包括:
14、本申请提供了一种车架焊接生产线,包括依工序顺次排布的焊接工位和补焊工位,在焊接工位设置有焊接机器人组,焊接机器人组用于焊接形成车架主体,在补焊工位设置有补焊机器人和补焊变位机构,补焊变位机构包括补焊回转基座以及转动设置于补焊回转基座上的多个补焊工作台,补焊工作台用于放置车架主体,补焊工作台的转动轴与补焊回转基座的转动轴垂直,能够避免造成车架表面划伤以及增加打磨工序的问题,无需专业的补焊工人,并且循环作业便可以提高补焊的作业效率。在此过程中,操作人员无需在两个补焊工作台之间来回移动,因此,也可以降低操作人员的劳动强度。在补焊的过程中,可以使得补焊工作台相对补焊回转基座进行转动,从而调整车架主体相对补焊机器人的角度,方便补焊机器人对关键部位进行补焊,降低干涉范围。
技术特征:1.一种车架焊接生产线,其特征在于,包括依工序顺次排布的焊接工位和补焊工位,在所述焊接工位设置有焊接机器人组,所述焊接机器人组用于焊接形成车架主体,在所述补焊工位设置有补焊机器人和补焊变位机构,所述补焊变位机构包括补焊回转基座以及转动设置于所述补焊回转基座上的多个补焊工作台,所述补焊工作台用于放置所述车架主体,所述补焊工作台的转动轴与所述补焊回转基座的转动轴垂直。
2.如权利要求1所述的车架焊接生产线,其特征在于,所述焊接工位包括第一焊接工位,所述焊接机器人组包括位于所述第一焊接工位的第一焊接机器人和两个第一焊接工作台,两个所述第一焊接工作台分布于所述第一焊接机器人的相对两侧,所述第一焊接机器人于两个所述第一焊接工作台之间交替焊接,并在所述第一焊接工作台上焊接形成前梁管组件。
3.如权利要求2所述的车架焊接生产线,其特征在于,所述焊接工位包括第二焊接工位,所述焊接机器人组包括位于所述第二焊接工位的第二焊接机器人和第二焊接变位机构,所述第二焊接变位机构包括第二回转基座以及设置于所述第二回转基座上的两个第二焊接工作台,所述第二回转基座受驱转动,以使两个所述第二焊接工作台交替位于所述第二焊接机器人的焊接区域,所述第二焊接机器人于所述第二焊接工作台上焊接形成整车框架。
4.如权利要求3所述的车架焊接生产线,其特征在于,所述焊接工位包括第三焊接工位,所述焊接机器人组包括位于所述第三焊接工位的第三焊接机器人和第三焊接变位机构,所述第三焊接变位机构包括第三回转基座以及设置于所述第三回转基座上的两个第三焊接工作台,所述第三回转基座受驱转动,以使两个所述第三焊接工作台交替位于所述第三焊接机器人的焊接区域,所述第三焊接机器人于所述第三焊接工作台上在所述整车框架上焊接正面配件。
5.如权利要求4所述的车架焊接生产线,其特征在于,所述焊接工位包括第四焊接工位,所述焊接机器人组包括位于所述第四焊接工位的第四焊接机器人和第四焊接变位机构,所述第四焊接变位机构包括第四回转基座以及设置于所述第四回转基座上的两个第四焊接工作台,所述第四回转基座受驱转动,以使两个所述第四焊接工作台交替位于所述第四焊接机器人的焊接区域,所述第四焊接机器人于所述第四焊接工作台上在所述整车框架上焊接背面配件以形成所述车架主体。
6.如权利要求1至5任一项所述的车架焊接生产线,其特征在于,所述车架焊接生产线还包括依工序排布于所述补焊工位之后的矫正工位,在所述矫正工位内设置有矫正工作台,在所述矫正工作台上设置有用于矫正车架的矫正工装。
7.如权利要求5所述的车架焊接生产线,其特征在于,在所述第二回转基座上设置有位于两个所述第二焊接工作台之间的第一隔断板;在所述第三回转基座上设置有位于两个所述第三焊接工作台之间的第二隔断板;所述第四回转基座上的两个第四焊接工作台之间的第三隔断板。
8.如权利要求5所述的车架焊接生产线,其特征在于,所述第一焊接工位、所述第二焊接工位、所述第三焊接工位、所述第四焊接工位和所述补焊工位呈线性排布。
9.如权利要求8所述的车架焊接生产线,其特征在于,所述车架焊接生产线还包括流转于所述第一焊接工位、所述第二焊接工位、所述第三焊接工位、所述第四焊接工位和所述补焊工位之间的传输机构。
10.如权利要求1所述的车架焊接生产线,其特征在于,所述补焊机器人具有多轴机械臂。
技术总结本申请提供一种车架焊接生产线,涉及电动车技术领域,包括依工序顺次排布的焊接工位和补焊工位,在焊接工位设置有焊接机器人组,焊接机器人组用于焊接形成车架主体,在补焊工位设置有补焊机器人和补焊变位机构,补焊变位机构包括补焊回转基座以及转动设置于补焊回转基座上的多个补焊工作台,补焊工作台的转动轴与补焊回转基座的转动轴垂直,在补焊过程中,操作人员无需在两个补焊工作台之间来回移动,可以使得补焊工作台相对补焊回转基座进行转动,从而调整车架主体相对补焊机器人的角度,方便补焊机器人对关键部位进行补焊,降低干涉范围。技术研发人员:刘洪强,任志新,苑琳辉,段福敏,孙利明受保护的技术使用者:天津爱玛车业科技有限公司技术研发日:20231122技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240618/15128.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表