一种并联式工业机器人实训机构的制作方法
- 国知局
- 2024-06-21 13:33:48
本技术涉及机器人实训机构,具体为一种并联式工业机器人实训机构。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中,并联式机器人是常用的一种工业机器人,并联机器人的特点呈现为无累积误差,精度较高,应用广泛;在工业院校或者生产线上,要对实训人员进行专业的培训,以了解并掌握工业机器人的工作方式;
2、现有实训方式中,缺乏有效的机器人实训机构,对于一些缺乏设备的院校来说,学生只能通过视频资料来了解并联式工业机器人的工作方式,而对与具有生产线的工厂来说,多由经验足的老师傅通过操作来进行讲解,无法给予学生动手学习的机会,无法起到较好的实训效果,为此,我们提出一种并联式工业机器人实训机构。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种并联式工业机器人实训机构,具有可靠的操控实训单元,能够使实训人员手动模拟机器人搬移物品的操作,从而帮助实训人员体验学习到工业机器人的工作方式,且具有可靠的并联执行单元,多个连杆能够共同执行搬移物品的操作,且方便实训人员观察并联机器人的工作方式,实训人员还可以根据手动模拟时的参数进行编程输入,进而对机器人的自动化工作进行模拟,提高了实训效果,可以有效解决背景技术中的问题。
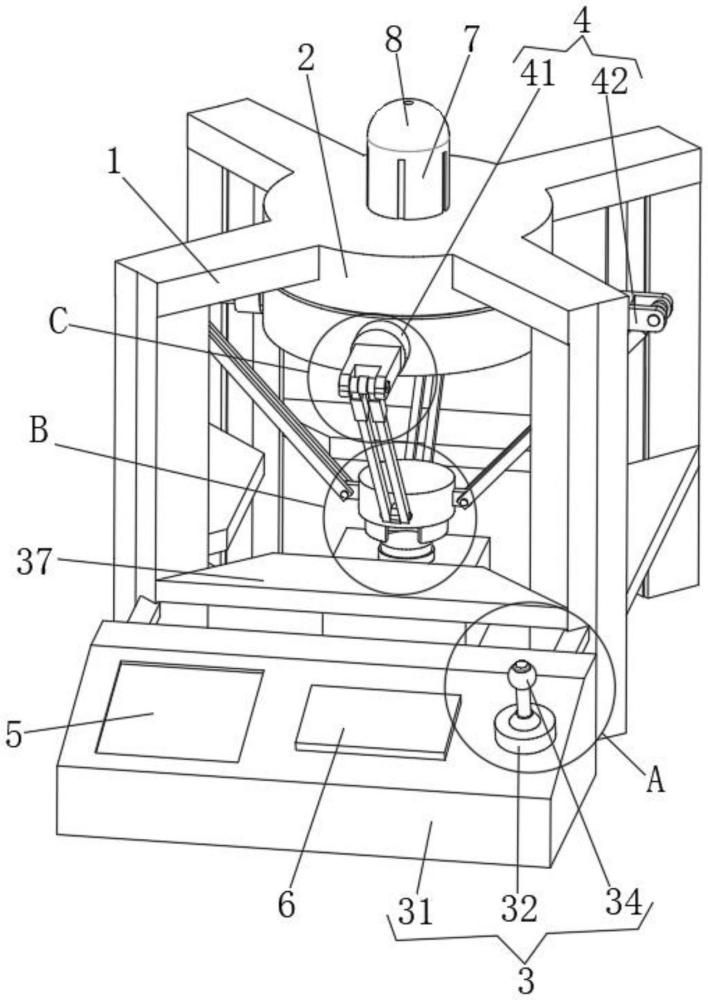
2、为实现上述目的,本实用新型提供如下技术方案:一种并联式工业机器人实训机构,包括安装架、操控实训单元和并联执行单元;
3、安装架:为l形结构且设有四个,四个安装架呈环形阵列分布且上侧水平段的端部均固定连接在圆柱形机器人主体的圆周外侧,所述机器人主体分为上下两部分,且在内部安装有plc控制器;
4、操控实训单元:包含实训台、安装座、摇杆控制器、手握把、放料台、搬移圆块、侧放置台和控制按钮,所述实训台设置在四个安装架的前侧,所述实训台斜前端的右侧固定连接有安装座,所述安装座的内部通过万向球活动连接有摇杆控制器,所述摇杆控制器的上端固定连接有球形的手握把,所述手握把的上侧安装有控制按钮,所述放料台放置在四个安装架的中间位置处,且放料台的上端放置有搬移圆块,每两个相邻的两个安装架之间均固定连接有一个水平的侧放置台,四个侧放置台分别固定连接在相邻两个安装架之间且呈环抱设置;
5、并联执行单元:安装在机器人主体的下侧。
6、安装架用于机器人主体的安装,机器人主体通过内部的plc控制器来控制下侧的执行部件工作启停,实训台用于学生观摩并参与实训操作,安装座用于摇杆控制器的安装,球形的手握把能够提高实训人员手部握持的舒适度,放料台用于搬移圆块的放置,实训人员通过手握把上的控制按钮控制电动卡盘夹住搬移圆块,并通过手握把摇动摇杆控制器来控制电动卡盘进行移动,当移动到侧放置台处时可以按控制按钮放下搬移圆块,从而使实训人员体验学习到工业机器人的工作方式,并联执行单元用于对移动搬移圆块的过程提供硬件支持。
7、进一步的,所述操控实训单元还包含防护皮套和线路套管,所述手握把的下侧套有防护皮套,所述防护皮套的下端固定连接在安装座的上侧,所述实训台与前侧的两个安装架之间均固定连接有一个线路套管。防护皮套用于防止外部灰尘进入,以免对摇杆控制器的活动造成不良影响,线路套管用于通信控制电路的铺设,并在电路线的外部形成防护。
8、进一步的,所述并联执行单元包含活动安装座、第二安装架、安装轴、连接套环、套筒液压缸和连接杆,所述机器人主体下部分前后左右四个方向上均转动连接有一个活动安装座,每个活动安装座的外端均固定连接有一个第二安装架,所述第二安装架的外端均开设有安装夹槽,所述安装夹槽的内部活动连接有安装轴,所述安装轴的中部固定连接有分隔块,所述安装轴的外部且在分隔块的两侧均套有一个连接套环,每个连接套环的圆周侧均固定连接有一个连接杆,两个连接杆平行斜向设置且朝向装置中部,每个连接杆的偏上位置处嵌设安装有套筒液压缸,所述套筒液压缸具有两个控制回路,两个控制回路的输入端分别通过摇杆控制器和机器人主体内部的plc控制器与外部电源的输出端电连接。第二安装架用于安装轴的安装,连接杆通过连接套环与安装轴活动连接,套筒液压缸用于控制连接杆进行伸缩,当控制电动卡盘竖直升降时,四组套筒液压缸同时工作,当控制电动卡盘往一个给定方向移动时,移动方向上的两组筒液压缸控制连接杆一收一放,活动安装座使得与移动方向垂直的两个连接杆能够发生倾斜,从而有效实现电动卡盘的位移,进而对并联式工业机器人的工作方式进行展示。
9、进一步的,所述并联执行单元还包含电动卡盘和连接块,所述电动卡盘的环形侧面圆周阵列固定连接有四个连接块,四个连接块分别卡置在相邻侧两个连接杆之间,且连接块与连接杆的下端通过销柱活动连接,所述电动卡盘的输入端通过控制按钮以及机器人主体内部的plc控制器与外部电源的输出端电连接。连接块用于电动卡盘与连接杆之间的活动连接,电动卡盘用于实现机器人抓取搬移物品的功能。
10、进一步的,还包括参数显示屏和编程输入板,所述实训台斜前端的左侧前侧安装有参数显示屏,所述实训台斜前端的中部安装有编程输入板,所述参数显示屏和编程输入板的输入端与机器人主体内部的plc控制器双向电连接。参数显示屏用于显示在手动模式下套各个筒液压缸伸缩量的数据,从而可以方便实训人员记录,并从编程输入板输入以进行机器人自动化工作的模拟实验。
11、进一步的,还包括蜂鸣提示器和操作提示灯,所述机器人主体的上端圆心处安装有柱状的蜂鸣提示器,且在蜂鸣提示器的上端安装有操作提示灯,所述蜂鸣提示器和操作提示灯的输入端均通过机器人主体内部的plc控制器与外部电源的输出端电连接。蜂鸣提示器和操作提示灯在机器人内部plc控制器控制套筒液压缸或电动卡盘工作时发出声音以及灯光指示,从而向实训人员提供视听上的操作反馈,帮助实训人员更好地学习使用并联式工业机器人。
12、与现有技术相比,本实用新型的有益效果是:本并联式工业机器人实训机构,具有以下好处:
13、1、具有可靠的操控实训单元,能够通过模拟搬移物品的操作,从而帮助实训人员体验学习到工业机器人的工作方式:实训台用于学生观摩并参与实训操作,安装座用于摇杆控制器的安装,球形的手握把能够提高实训人员手部握持的舒适度,放料台用于搬移圆块的放置,实训人员通过手握把上的控制按钮控制电动卡盘夹住搬移圆块,并通过手握把摇动摇杆控制器来控制电动卡盘进行移动,当移动到侧放置台处时可以按控制按钮放下搬移圆块,从而使实训人员体验学习到工业机器人的工作方式;
14、2、具有可靠的并联执行单元,多个连杆能够共同执行搬移物品的操作,且方便实训人员观察并联机器人的工作方式:第二安装架用于安装轴的安装,连接杆通过连接套环与安装轴活动连接,套筒液压缸用于控制连接杆进行伸缩,连接块用于电动卡盘与连接杆之间的活动连接,电动卡盘用于实现机器人抓取搬移物品的功能;当控制电动卡盘竖直升降时,四组套筒液压缸同时工作,当控制电动卡盘往一个给定方向移动时,移动方向上的两组筒液压缸控制连接杆一收一放,活动安装座使得与移动方向垂直的两个连接杆能够发生倾斜,从而有效实现电动卡盘的位移,进而对并联式工业机器人的工作方式进行展示;
15、3、本实用新型具有可靠的操控实训单元,能够使实训人员手动模拟机器人搬移物品的操作,从而帮助实训人员体验学习到工业机器人的工作方式,且具有可靠的并联执行单元,多个连杆能够共同执行搬移物品的操作,且方便实训人员观察并联机器人的工作方式,实训人员还可以根据手动模拟时的参数进行编程输入,进而对机器人的自动化工作进行模拟,提高了实训效果。
本文地址:https://www.jishuxx.com/zhuanli/20240618/33189.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表