一种用于模拟飞机对接的六自由度运载平台
- 国知局
- 2024-06-21 14:09:09
本发明属于飞机加油,尤其涉及一种用于模拟飞机对接的六自由度运载平台。
背景技术:
1、现有空中加油分为软管式和硬管式加油,二者主要依赖于加油操作员的操作,通过人工观察慢慢调整加油管位置,以实现受油机与加油机的对接。该方式存在工作效率低,且精度无法评估的问题,因此提出一种用于模拟飞机对接的六自由度运载平台。
技术实现思路
1、为解决上述技术问题,本发明提出了一种用于模拟飞机对接的六自由度运载平台,在地面模拟受油机实物环境,该运载平台可以实现模拟受油机近距离动态接近、与加油机实现加油对接、信息交互等过程,在实验室内即可模拟飞机姿态,完成加油任务的仿真与验证,充分支持航电系统地面试验各项试验项目验证,同时利用大量地面模拟可使得飞行试验提高效率、降低风险。
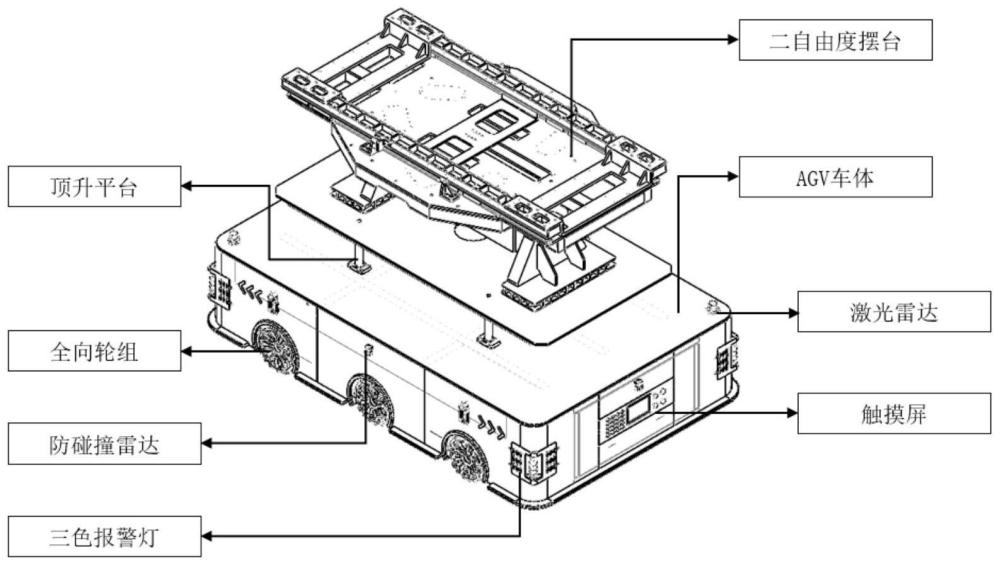
2、为实现上述目的,本发明提供了一种用于模拟飞机对接的六自由度运载平台,包括:智能导航多自由度agv车体、顶升平台和二自由度摇摆平台;
3、所述顶升平台安装于所述智能导航多自由度agv车体内部,所述顶升平台的上端与所述二自由度摇摆平台连接;
4、所述顶升平台,用于所述运载平台的z轴升降;
5、所述二自由度摇摆平台,用于模拟飞机的俯仰和翻滚动作;
6、所述智能导航多自由度agv车体为全向移动平台的主体。
7、可选的,所述智能导航多自由度agv车体还包括:全向轮组、防碰撞雷达、三色报警灯、激光雷达和触摸屏;
8、所述全向轮组,用于伺服电机控制各全向轮的转向和转速;
9、所述防碰撞雷达,用于防止任何可能的碰撞和伤害;
10、所述三色报警灯,用于警告示意危险情况;
11、所述激光雷达,用于获取环境信息;
12、所述触摸屏,用于显示六自由度agv运载平台各模块状态及控制所述运载平台。
13、可选的,所述智能导航多自由度agv车体采用模块化设计,材料为q235钢,搭载6套全向轮组,所述全向轮组配置独立悬挂。
14、可选的,所述二自由度平台的翻滚和俯仰动作由俯仰台体和翻滚台体独立实现,翻滚台体和俯仰台体固定于顶升平台上,通过螺栓连接。
15、可选的,所述运载平台包括:集成功能模块、自动导航功能模块、安全防护功能模块、姿态模拟功能模块和运动控制功能模块;
16、所述集成功能模块,用于基于麦克纳姆轮技术的全向移动平台作为底盘,通过合理布局搭载所述顶升平台、所述二自由度平台、飞机模型及各类传感器;
17、所述自动导航功能模块,用于获取的环境信息进行自动导航;
18、所述安全防护功能模块,用于确保所述运载平台运动过程中的安全;
19、所述姿态模拟功能模块,用于所述智能导航多自由度agv车体、所述顶升平台和所述二自由度摇摆平台的姿态模拟;
20、所述运动控制功能模块,用于底盘全向移动控制、自动导航控制、升降系统控制、二自由度平台旋转控制,与上位总体控制系统进行通讯以及给平台电气模块供电功能,其中所述上位机总体控制系统,用于控制整个运载平台,给各模块发送运动指令,控制零部件按照要求运动;所述运载平台电气模块,用于给整体平台供电、接受电气指令。
21、可选的,所述自动导航功能模块包括:视觉导航单元和激光导航单元;
22、所述视觉导航单元,用于通过在环境中设置可见的标识或特征,所述运载平台通过识别所述标识或所述特征进行导航;
23、所述激光导航单元,用于利用激光雷达等设备获取环境信息,通过对比实际检测到的和预先设定的环境模型进行导航。
24、可选的,所述安全防护功能模块的工作过程包括:在六自由度agv运载平台的显著位置,设置紧急停止按钮;在紧急情况下,用户按下此按钮,立即停止所述运载平台各模块的运行;平台配备限位装置,以限制所述运载平台移动范围;同时所述运载平台设置避障和安全触边,避障是指所述运载平台在移动过程中,通过感知周围环境自动避开障碍物或危险区域;安全触边是运动平台在接触到物体后,紧急停止以避免超出安全范围。
25、可选的,所述姿态模拟功能模块中所述顶升平台用于模拟飞机的升降姿态,所述飞机模型固定于所述二自由度平台,所述二自由度平台旋转用于模拟飞机的翻滚和俯仰姿态。
26、本发明技术效果:本发明公开了一种用于模拟飞机对接的六自由度运载平台,在地面模拟受油机实物环境,该运载平台可以实现模拟受油机近距离动态接近、与加油机实现加油对接、信息交互等过程,在实验室内即可模拟飞机姿态,完成加油任务的仿真与验证,充分支持航电系统地面试验各项试验项目验证,同时利用大量地面模拟可使得飞行试验提高效率、降低风险。
技术特征:1.一种用于模拟飞机对接的六自由度运载平台,其特征在于,包括:
2.如权利要求1所述的用于模拟飞机对接的六自由度运载平台,其特征在于,所述智能导航多自由度agv车体还包括:全向轮组、防碰撞雷达、三色报警灯、激光雷达和触摸屏;
3.如权利要求1所述的用于模拟飞机对接的六自由度运载平台,其特征在于,所述智能导航多自由度agv车体采用模块化设计,材料为q235钢,搭载6套全向轮组,所述全向轮组配置独立悬挂。
4.如权利要求1所述的用于模拟飞机对接的六自由度运载平台,其特征在于,所述二自由度平台的翻滚和俯仰动作由俯仰台体和翻滚台体独立实现,翻滚台体和俯仰台体固定于顶升平台上,通过螺栓连接。
5.如权利要求1所述的用于模拟飞机对接的六自由度运载平台,其特征在于,所述运载平台包括:集成功能模块、自动导航功能模块、安全防护功能模块、姿态模拟功能模块和运动控制功能模块;
6.如权利要求5所述的用于模拟飞机对接的六自由度运载平台,其特征在于,所述自动导航功能模块包括:视觉导航单元和激光导航单元;
7.如权利要求5所述的用于模拟飞机对接的六自由度运载平台,其特征在于,所述安全防护功能模块的工作过程包括:在六自由度agv运载平台的显著位置,设置紧急停止按钮;在紧急情况下,用户按下此按钮,立即停止所述运载平台各模块的运行;平台配备限位装置,以限制所述运载平台移动范围;同时所述运载平台设置避障和安全触边,避障是指所述运载平台在移动过程中,通过感知周围环境自动避开障碍物或危险区域;安全触边是运动平台在接触到物体后,紧急停止以避免超出安全范围。
8.如权利要求5所述的用于模拟飞机对接的六自由度运载平台,其特征在于,所述姿态模拟功能模块中所述顶升平台用于模拟飞机的升降姿态,所述飞机模型固定于所述二自由度平台,所述二自由度平台旋转用于模拟飞机的翻滚和俯仰姿态。
技术总结本发明公开了一种用于模拟飞机对接的六自由度运载平台,包括:智能导航多自由度AGV车体、顶升平台和二自由度摇摆平台;所述顶升平台安装于所述智能导航多自由度AGV车体内部,所述顶升平台的上端与所述二自由度摇摆平台连接;所述顶升平台,用于所述运载平台的Z轴升降;所述二自由度摇摆平台,用于模拟飞机的俯仰和翻滚动作;所述智能导航多自由度AGV车体为全向移动平台的主体。本发明利用大量地面模拟可使得飞行试验提高效率、降低风险。技术研发人员:张颖,马春光,宋凯,张沪松,楼佩煌,钱晓明,夏超受保护的技术使用者:南京航空航天大学苏州研究院技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240618/36295.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。