一种防堆积式注塑模具下料转运系统的制作方法
- 国知局
- 2024-07-17 13:25:03
本技术涉及注塑模具脱模后的工件转运领域,具体的说是一种防堆积式注塑模具下料转运系统。
背景技术:
1、采用注塑模具成型工件时,脱模后的工件需要被转运至盛料框内以进行后续的操作,该过程为工件的下料转运过程。
2、现有技术中将工件转运至盛料框的过程如下:首先控制机械手向下移动夹持从模具中脱出的工件,再控制机械手向上移动一定距离后将机械手水平移动,待机械手移动至盛料框上方后再下行一定距离,打开机械手,工件即可落入盛料框内。
3、但是,由于机械手的行程固定,现有技术中工件落入盛料框内的位置往往是固定不变的,而重新更换新的多维度移动机械手成本较高。因此,在生产现场,常常需要安排有工作人员定时查看,当工件在盛料框内堆积较高时,人工将工件拨平,这种操作方式一方面会造成人力资源的浪费,另一方面还可能会由于工作人员的疏忽造成工件在盛料框内堆积、溢出盛料框,此时则需要拾取、整理工件再进行转运,影响整个工序的平稳进行,降低了工作效率。
技术实现思路
1、本实用新型旨在提供一种防堆积式注塑模具下料转运系统,以解决现有移动机械手不便更换情况下的盛料框内工件易堆积的技术问题。
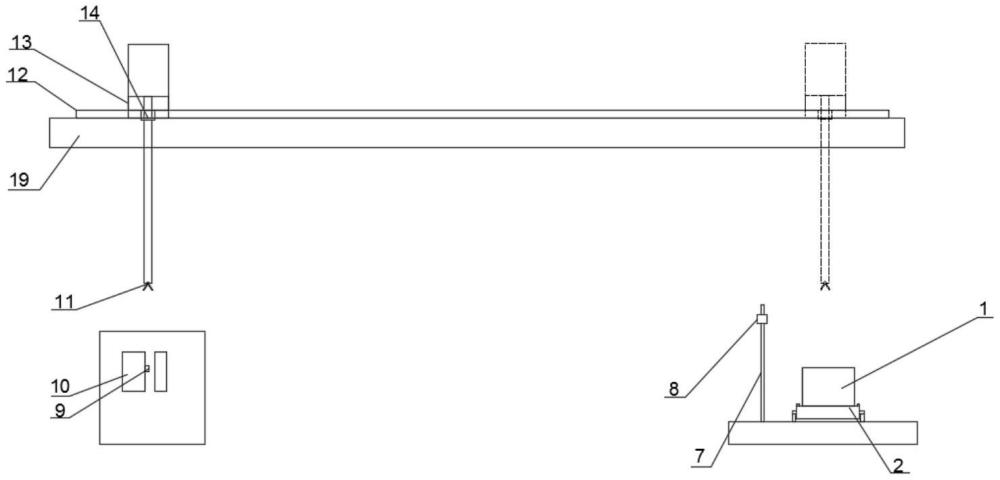
2、为了解决以上技术问题,本实用新型采用的具体方案为:一种防堆积式注塑模具下料转运系统,包括用于夹持待转运工件的移动机械手和盛放工件的盛料框,还包括传感器和控制器,盛料框放置在转运平台的水平移动机构上,水平移动机构能够带动盛料框直线运动;传感器设置在移动机械手向盛料框转运工件的路径处,传感器将工件通过的信号传递至控制器,控制器控制水平移动机构带动盛料框移动。
3、作为上述技术方案的进一步优化:在转运平台上竖直设置有用于固定传感器的安装杆。
4、作为上述技术方案的进一步优化:传感器为红外传感器。
5、作为上述技术方案的进一步优化:水平移动机构为传送带机构。
6、作为上述技术方案的进一步优化:传送带机构的传送带上表面固定设置多个限位挡块,多个限位挡块组成放置盛料框的放置区。
7、作为上述技术方案的进一步优化:传送带机构的传送带上下层之间设置有支撑板。
8、作为上述技术方案的进一步优化:水平移动机构包括托盘和直线驱动元件,托盘滑动安装在转运平台上,直线驱动元件的伸缩端与托盘连接。
9、作为上述技术方案的进一步优化:直线驱动元件为电动推杆或液压杆。
10、作为上述技术方案的进一步优化:托盘上设置有多个限位挡块,多个限位挡块组成放置盛料框的放置区。
11、作为上述技术方案的进一步优化:移动机械手包括夹持头、控制夹持头移动的竖直移动组件和水平移动组件。
12、与现有技术相比,本实用新型的有益效果如下:本实用新型通过将盛料框设置在水平移动机构上,通过水平移动机构控制盛料框与机械手之间的距离,使工件落入盛料框内的不同位置,避免工件堆积。
13、通过设置控制器可以根据传感器的信号,控制水平移动机构带动盛料框直线运动,在机械手夹持的工件落入盛料框之后,控制器控制水平移动机构移动,使移动机械手夹持的下一工件落入盛料框内的其他位置,一方面避免工件堆积,另一方面为落入盛料框内的工件散热留存充足的时间。
技术特征:1.一种防堆积式注塑模具下料转运系统,包括用于夹持待转运工件(9)的移动机械手和盛放工件(9)的盛料框(1),其特征在于:还包括传感器(8)和控制器,盛料框(1)放置在转运平台(5)的水平移动机构上,水平移动机构能够带动盛料框(1)直线运动;传感器(8)设置在移动机械手向盛料框(1)转运工件(9)的路径处,传感器(8)将工件(9)通过的信号传递至控制器,控制器控制水平移动机构带动盛料框(1)移动。
2.根据权利要求1所述的一种防堆积式注塑模具下料转运系统,其特征在于:在转运平台(5)上竖直设置有用于固定传感器(8)的安装杆(7)。
3.根据权利要求1所述的一种防堆积式注塑模具下料转运系统,其特征在于:传感器(8)为红外传感器。
4.根据权利要求1所述的一种防堆积式注塑模具下料转运系统,其特征在于:水平移动机构为传送带机构。
5.根据权利要求4所述的一种防堆积式注塑模具下料转运系统,其特征在于:传送带机构的传送带(2)上表面固定设置多个限位挡块(15),多个限位挡块(15)组成放置盛料框(1)的放置区。
6.根据权利要求4所述的一种防堆积式注塑模具下料转运系统,其特征在于:传送带机构的传送带(2)上下层之间设置有支撑板(6)。
7.根据权利要求1所述的一种防堆积式注塑模具下料转运系统,其特征在于:水平移动机构包括托盘(16)和直线驱动元件(17),托盘(16)滑动安装在转运平台(5)上,直线驱动元件(17)的伸缩端与托盘(16)连接。
8.根据权利要求7所述的一种防堆积式注塑模具下料转运系统,其特征在于:直线驱动元件(17)为电动推杆或液压杆。
9.根据权利要求7所述的一种防堆积式注塑模具下料转运系统,其特征在于:托盘(16)上设置有多个限位挡块(15),多个限位挡块(15)组成放置盛料框(1)的放置区。
10.根据权利要求1所述的一种防堆积式注塑模具下料转运系统,其特征在于:移动机械手包括夹持头(11)、控制夹持头(11)移动的竖直移动组件(14)和水平移动组件(12)。
技术总结一种防堆积式注塑模具下料转运系统,涉及注塑模具脱模后的工件转运领域,包括用于夹持待转运工件的移动机械手和盛放工件的盛料框,还包括传感器和控制器,盛料框放置在转运平台的水平移动机构上,水平移动机构能够带动盛料框直线运动;传感器设置在移动机械手向盛料框转运工件的路径处,传感器将工件通过的信号传递至控制器,控制器控制水平移动机构带动盛料框移动。本技术通过将盛料框设置在水平移动机构上,通过水平移动机构控制盛料框与机械手之间的距离,使工件落入盛料框内的不同位置,避免工件堆积。技术研发人员:李雷雷,李志永受保护的技术使用者:洛阳力诺模具有限公司技术研发日:20231027技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240711/109453.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表