一种轨道运输机远程控制及安全监测系统
- 国知局
- 2024-08-01 08:46:32
本发明涉及轨道运输机控制及监测领域,尤其涉及一种轨道运输机远程控制及安全监测系统。
背景技术:
1、山区闲置的山地资源多,难以利用的主要原因就是山地交通不便,运输极为困难。山地轨道运输机等农机的推广使用,极大程度的降低农民的劳动强度,也为农民致富开辟了一条捷径。山地轨道运输机用于解决丘陵山区果园、水果采摘后、农作物等的运输,日常管理时肥料和农药等物资的运输以及小型耕种机具、打药器械和除草等机械的运输。大幅度帮助农户减少运输成本提高工作效率,也增强了老百姓对农作物种植的积极性。
2、在山区复杂的地形和环境中,轨道运输机必须能够检测前方道路上的障碍物及自身的缺陷检测,以便于及时采取措施来避免碰撞和事故发生。然而,目前的山地轨道运输机检测技术还需要进一步改进和完善,以提高对前方障碍物和周围环境的准确检测能力。
3、现有技术中,主要通过人工检查、超声波检测技术来检测运输机的运行状态,该方法受到操作人员主观判断和经验的影响,可能存在主观偏差。不同的操作人员可能会对同一问题有不同的看法,导致结果的不一致性。大型轨道运输机通常具有复杂的结构和大量的部件,完全依靠人工视察进行全面检测可能需要耗费大量时间和人力资源。利用超声波传感器测量轨道运输机表面超声波的传播和回波信号,以检测缺陷、裂纹或材料的疲劳程度。该方法原理简单、实时性好,但对于深埋或难以到达的部位可能存在局限性。然而轨道运输机在运输过程中,需要实时了解前方障碍物情况,以避免撞击障碍物而发生事故,此外对运输机自身的定位和检测也很重要,能有效的掌握运输机的运行状态。
技术实现思路
1、为了解决上述问题,本发明的目的在于提供一种轨道运输机远程控制及安全监测系统,通过5g技术实现轨道运输机的远程控制,包括运输机运行的速度、方向、制动,采用多元感知技术实现对运输机的实时安全监测,包括采用视频图像和雷达进行结合检测前方障碍物,实现自动避障,采用红外热成像仪检测齿轮和齿条的缺陷,采用加速度传感器检测运输机的晃动情况。可以提高轨道运输机的操作灵活性、安全性和效率,降低事故风险,并为维护和管理提供了重要的支持和依据。
2、为了实现上述目的,本发明提供的一种轨道运输机远程控制及安全监测系统是这样实现的:
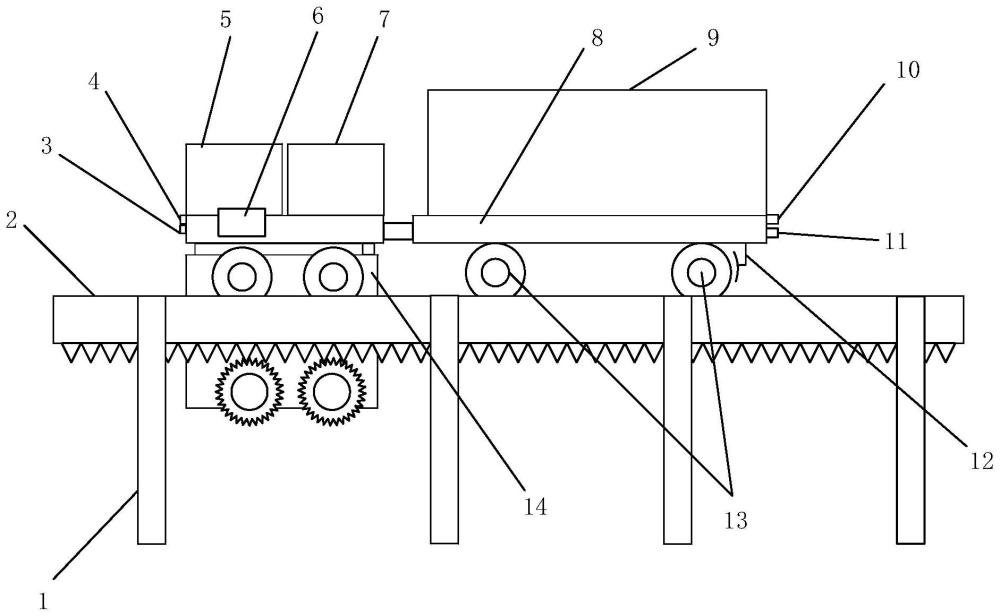
3、一种轨道运输机远程控制及安全监测系统,包括支柱、轨道、前雷达、前摄像头、发动机、控制箱、油箱、车架、货箱、后摄像头、后雷达、制动装置、从动轮、动力装置,轨道安装在支柱上方,由发动机、控制箱、油箱、车架、货箱、制动装置、从动轮、动力装置组成运输机,发动机、控制箱、油箱安装在车架前上方,货箱安装在车架后上方,采用两个相同的从动轮安装在货箱下方的车架底部,用于辅助运输机行驶,动力装置安装在车架前下方,用于带动运输机在轨道上行驶,前雷达和前摄像头安装在车架前方,用于检测前方的障碍物,后摄像头和后雷达安装在车架后方,制动装置安装在货箱后下方的车架底部,用于为运输机提供制动,由油箱为发动机供油,发动机发出来的电传输给动力装置,使动力装置在轨道上行驶,在动力装置行驶时带动车架行驶,由车架带动货箱中的货物运行,实现货物的运输,在从动轮的辅助下,运输机能够更加平稳的在轨道上行驶,前雷达、前摄像头、后摄像头、后雷达将采集到的数据传输至控制箱,在控制箱中将这些信息进行融合识别障碍物,以便运输机及时采取制动来避免安全事故的发生,并通过5g技术将这些数据传输至监控中心,在监控中心能够通过5g技术远程控制运输机的运行,包括运行速度、运行方向和制动,由控制箱控制动力装置带动运输机运行,且控制制动装置对运输机进行制动操作。
4、本发明的轨道包括滑槽、齿条,在轨道上开槽作为滑槽,用于为运输机提供支撑点和导向,轨道下方设置成齿条,便于动力装置与齿条咬合后为运输机提供前进或后退的动力。
5、本发明的动力装置包括伺服电机、减速器、振动传感器、上齿轮、轴承支架、主齿轮、主动轮、三轴加速度传感器、红外热成像仪、直齿轮、下齿轮、旋转轴、轴承、速度传感器,伺服电机的转轴与减速器的动力输入端连接,主齿轮与减速器的动力输出端连接,轴承支架与减速器安装在一起,采用旋转轴将上齿轮和主动轮连接在一起,并安装在轴承支架上,采用旋转轴将下齿轮和直齿轮连接在一起,并安装在轴承支架上,旋转轴与轴承支架之间采用轴承连接,由伺服电机为减速器传动,减速器带动主齿轮转动,主齿轮为上齿轮和下齿轮传动,进而带动主动轮在轨道的滑槽中运动,带动直齿轮在轨道的齿条上运动,振动传感器安装在轴承支架内部,用于监测减速器、轴承、上齿轮、主齿轮、下齿轮是否存在缺陷,三轴加速度传感器和红外热成像仪安装在轴承支架外表面,三轴加速度传感器用于检测动力装置的晃动情况,通过检测动力装置的晃动来反映整个运输机的晃动情况,红外热成像仪用于检测直齿轮和轨道上齿条的缺陷,速度传感器安装在减速器的动力输出端,用于检测减速器的输出速度,用采集到的速度转换后值作为运输车的运行速度,振动传感器、三轴加速度传感器、红外热成像仪、速度传感器采集到的数据信息传输至控制箱,由控制箱将这些数据信息传输至监控中心进行实时监测,且控制箱接收到速度传感器传来的速度信息后,会调节伺服电机的转速,使运输车处于预设速度范围内行驶。
6、本发明的主动轮和直齿轮各采用两个,且每个主动轮都通过旋转轴与一个上齿轮连接,该旋转轴再安装在轴承支架上;每个直齿轮都通过旋转轴与一个下齿轮连接,该旋转轴再安装在轴承支架上,采用双齿轮设计可以提高运输机的稳定性、传动效率和承载能力,同时减轻了每个主动轮的负荷,提高了系统的可靠性和耐久性。
7、本发明的从动轮采用铁脚轮,铁脚轮与车架之间通过液压减震连接,液压减震能吸收和减缓由振动和冲击产生的能量,从而减少对车架的影响。
8、本发明的制动装置包括支撑箱、伸缩电机、闸瓦,支撑箱安装在车架底部,伸缩电机安装在支撑箱中,闸瓦与伸缩电机的伸缩杆连接在一起,需要实现运输机的制动时,控制箱控制伺服电机停止转动,直齿轮与齿条之间的咬合摩擦达到一次制动,减缓运输机的速度,紧接着控制箱控制伸缩电机伸出伸缩杆,将闸瓦顶到铁脚轮上,实现二次制动,通过闸瓦与铁脚轮的接触,产生更大的刹车力,进一步减速甚至停止运输机。
9、本发明的控制箱包括金属铝盒、稳压器、伸缩电机驱动板、伺服电机驱动板、控制电路板、5g模块,稳压器、伸缩电机驱动板、伺服电机驱动板、控制电路板、5g模块均安装在金属铝盒中,5g模块的天线放置在金属铝盒外表面,稳压器与发电机连接,用于将发电机发出来的电源电压稳定在其设定值范围内,使伺服电机和伸缩电机能在额定工作电压下正常工作,伸缩电机驱动板、伺服电机驱动板均与控制电路板、稳压器电性连接,经稳压器稳压后的电源分别输入伸缩电机驱动板、伺服电机驱动板中,再由伸缩电机驱动板、伺服电机驱动板分别与伸缩电机和伺服电机连接,由控制电路板控制伸缩电机驱动板、伺服电机驱动板的输出,进而控制伸缩电机和伺服电机的转动,5g模块与控制电路板连接,且前摄像头、前雷达、后摄像头、后雷达、振动传感器、三轴加速度传感器、红外热成像仪、速度传感器与控制电路板电性连接,并将采集到的数据信息传输至控制电路板,经控制电路板处理后控制5g模块将这些数据信息传输至监控中心的pc机上进行实时监测,在pc机上实时显示运输机前后的环境视频图像,实时显示减速器、轴承、上齿轮、主齿轮、下齿轮、直齿轮、齿条的信息,监控这些部件是否存在缺陷,且pc机中会记录运输机晃动的位置,便于工作人员前往查看该处的齿条是否断裂,且控制电路板接收到速度传感器传来的速度信息后,会通过调节伺服电机驱动板的输出来调节伺服电机的转速,使运输车处于预设速度范围内行驶,此外,工作人员可以通过pc机向5g模块发送速度、方向、制动的指令,5g模块将指令发送给控制电路板,再由控制电路板控制伺服电机驱动板的输出来调节伺服电机的转动和转速,通过控制伺服电机的正转来控制运输机前进,控制伺服电机的反转来控制运输机后退,控制电路板控制伸缩电机驱动板来控制伸缩电机的推动闸瓦来实现制动。
10、本发明通过视频图像和雷达数据进行决策融合来检测运输机前进或后退方向上的障碍物,在视频图像检测方面,采用目标跟踪算法实现障碍物的检测,在雷达检测方面,采用支持向量机算法实现障碍物的检测,当两种检测算法识别到有障碍物时,进行雷视融合决策,当目标比对成功时,输出报警,雷视融合决策方案为:
11、s1.时间对齐,前雷达、后雷达与前摄像头、后摄像头对轨道周界环境进行实时监测,将采集到的雷达数据与视频数据分别送入到目标跟踪算法和支持向量机算法中,并行开启实时检测,雷达刷新率为12帧/秒,视频帧率为36帧/秒,视频的采集率为雷达的3倍,在检测时间起点进行对齐后,根据雷达数据的采集的时间戳,每间隔一帧对视频数据进行采样,达到时间同步。
12、s2.空间对齐,因为雷达检测数据带有坐标信息,因此当其检测到目标后,同步提取目标世界坐标,视频经算法检测到目标,可以得到目标质心像素坐标,并将其转化到成像坐标,最后将成像坐标转换到世界坐标,前雷达与前摄像头在同一高度并列安装,可近似为同一世界坐标,后雷达与后摄像头在同一高度并列安装,可近似为同一世界坐标,两种算法检测到目标后,同时提取与转换目标坐标,统一在一个世界坐标系中,完成空间同步。
13、s3.目标决策当两种检测算法识别到目标后,计算提取目标世界坐标,将识别结果信息输入到决策融合模块,模块基于逻辑融合判断规则进行决策报警。
14、s4.融合比对,基于雷达识别时间与视频识别时间,计算时间差值t。时间差值t与设定阈值ts进行比对,若t<ts,认为两种方式的识别结果为同一时间段内发生,进一步提取雷达识别目标世界坐标与视频识别目标世界坐标,计算目标之间的距离,并与距离阈值ds进行比较,若d<ds,则毫米波雷达与视频融合检测目标比对成功,输出融合报警结果;若t>ts或d>ds,表示比对失败,将视频与毫米波雷达识别结果,分别作为单独检测到情况,跳转到步骤s5和步骤s6。
15、s5.当视频单独检测到目标,等待时间tw。在等待时间内,不出现新结果,则结束判断,若出现新的识别结果,判断识别方式,若为雷达检测到目标,则跳转步骤s4;若仍是视频报警,进行累计计算,判断时间段td内报警数超过阈值s,若超过s,获取当前时间与计算画面亮度,判断是否为夜晚中极低照度场景,若不是该场景则将报警输出,若是,则进入人工复核。
16、s6.当毫米波雷达单独检测到目标,等待时间tw。在等待时间内,不出现新结果,则结束判断,若出现新的识别结果,判断识别方式,若为视频,则跳转步骤s4;若仍是毫米波雷达报警,进行累计计算,在时间段td报警数超过s,则输出报警结果。
17、本发明采用目标跟踪算法实现视频检测障碍物的方案为:
18、s1.视频采集:使用前摄像头、后摄像头采集设备录制周围环境的实时视频。
19、s2.预处理:对视频进行预处理,包括去噪、图像增强、调整亮度、对比度等,以提高后续检测算法的效果。
20、s3.目标检测:使用卷积神经网络对视频进行处理,识别出视频帧中的障碍物。
21、s4.目标跟踪:对于连续的视频帧,利用目标跟踪算法跟踪障碍物的位置和运动轨迹,以确定其在不同帧之间的关联性。
22、s5.障碍物分类:采用随机森林算法对检测到的障碍物进行分类,以区分不同类型的障碍物。
23、本发明采用支持向量机算法实现雷达检测障碍物的方案为:
24、s1.数据采集与预处理:使用前雷达、后雷达采集周围环境中的信号数据,对采集到的原始数据进行预处理,包括去除噪声、滤波和标准化等,以提高数据质量。
25、s2.特征提取:从预处理后的数据中提取多普勒频移特征,这些特征应能更好地描述障碍物的特性。
26、s3.数据标注:根据实际情况,对数据进行标注,将数据分为障碍物和非障碍物两类。
27、s4.数据集划分:将标注完成的数据集划分为训练集和测试集,通常采用交叉验证的方式进行,以评估算法的性能。
28、s5.特征选择:通过方差分析特征选择方法,选择出对障碍物检测效果影响较大的特征。
29、s6.支持向量机模型训练:使用训练集数据和标签,利用支持向量机算法训练分类模型,支持向量机将数据映射到高维空间,并构建一个最优超平面来实现分类。
30、s7.模型评估:使用测试集对训练好的支持向量机模型进行评估,计算识别准确率、召回率、f1值等指标来评估算法性能。
31、s8.参数优化:根据实际情况,调整核函数类型、核函数参数、惩罚系数,以提高模型的泛化能力。
32、s9.障碍物检测:使用训练好的支持向量机模型对新的雷达数据进行障碍物检测,将提取的特征输入到支持向量机模型中,根据模型的输出结果进行障碍物的判断和分类。
33、由于本发明采用通过5g技术实现轨道运输机的远程控制,利用多元感知技术实现对运输机的实时安全监测的结构,从而可以得到以下有益效果:
34、1.本发明采用5g技术,可以实现对轨道运输机的远程控制。这意味着操作员可以通过网络连接远程操控运输机的速度、方向和制动,无需直接接近运输机。这不仅提高了操作灵活性,还可以降低操作风险。
35、2.通过多元感知技术,可以实时监测运输机前方的障碍物,并进行自动避障。当系统检测到前方有障碍物时,运输机可以自动停止或调整速度和方向,以避免与障碍物碰撞,保证运输的安全性。
本文地址:https://www.jishuxx.com/zhuanli/20240718/233258.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表