一种基于深度学习的矿内货运列车行驶方向判断方法与流程
- 国知局
- 2024-08-01 08:46:26
本发明涉及列车驾驶,尤其涉及一种基于深度学习的矿内货运列车行驶方向判断方法。
背景技术:
1、申请号为201910949944.6的发明专利,专利名称为一种列车的定位方法、装置、系统和存储介质,列车的定位方法是使用列车的初始位置和对列车速度进行时间积分运算的结果确定列车的实时位置,然后根据列车通信连接的基站的识别信息并确定所述基站的信号强度;根据预先存储的所述基站的信号强度与位置的对应关系,确定所述基站的信号强度所对应的位置;从而确定列车当前时刻所处位置。以上方法的实现,基于稳定的网络信号,但是针对于矿内的货运列车,其网络信号传输并不稳定,极大可能还是网络信号无法覆盖的环境,因此上述方法并不适用矿内货运列车(下文均称为列车)的定位和行进方向的判断,故而针对上述环境存在的问题丞待解决。
技术实现思路
1、为解决上述技术问题,本发明提供了一种基于深度学习的列车行驶方向判断方法,能够实现矿内行驶的列车在离线环境下位置的识别和行进方向的判断。
2、本发明提供了一种基于深度学习的列车行驶方向判断方法,包括:
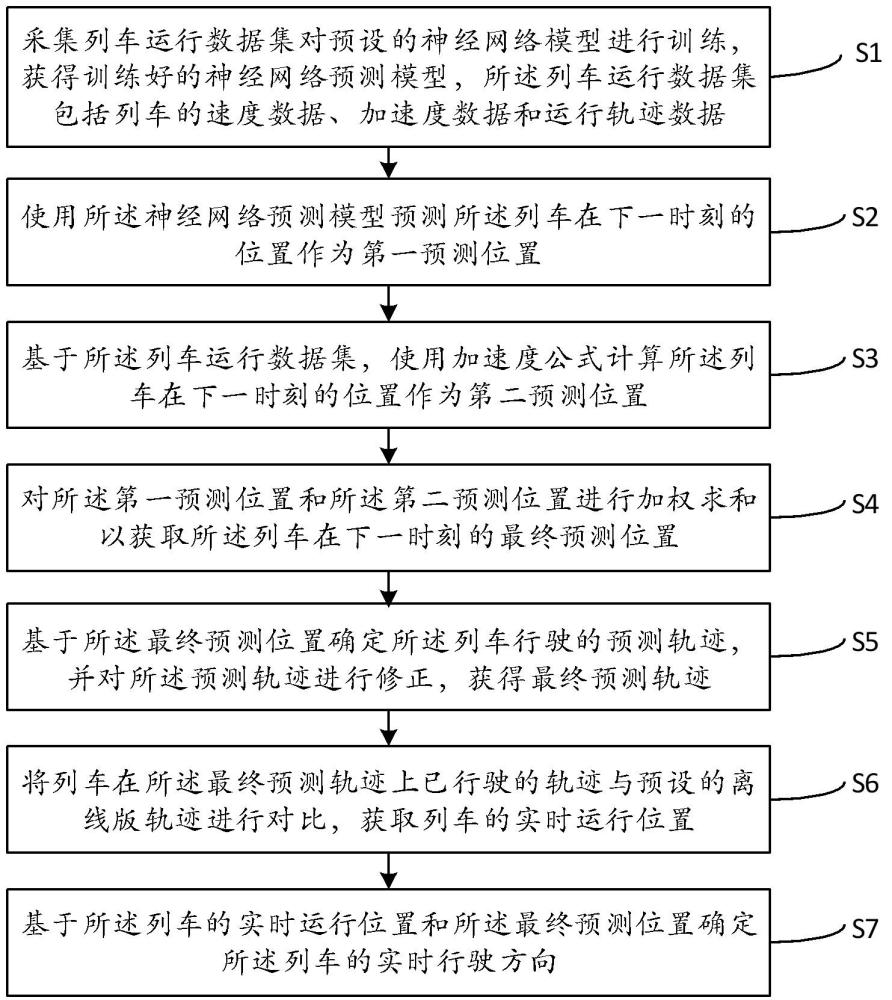
3、采集列车运行数据集对预设的神经网络模型进行训练,获得训练好的神经网络预测模型,所述列车运行数据集包括列车的速度数据、加速度数据和运行轨迹数据;
4、使用所述神经网络预测模型预测所述列车在下一时刻的位置作为第一预测位置;
5、基于所述列车运行数据集,使用加速度公式计算所述列车在下一时刻的位置作为第二预测位置;
6、对所述第一预测位置和所述第二预测位置进行加权求和以获取所述列车在下一时刻的最终预测位置;
7、所述第一预测位置的权重计算满足关系式:
8、
9、其中,为列车在第时刻下的第一预测位置的权重;为所述第一预测位置对应的神经网络模型输出的置信度;为第时刻下获取的第一预测位置和第二预测位置之间的欧式距离值;为第时刻下的第一预测位置的平滑程度值;
10、第二预测位置的权重计算满足关系式:
11、
12、其中,为第时刻下第二预测位置的权重;为第时刻下第二预测位置的平滑程度值;
13、基于所述最终预测位置确定所述列车行驶的预测轨迹,并对所述预测轨迹进行修正,获得最终预测轨迹;
14、将列车在所述最终预测轨迹上已行驶的轨迹与预设的离线版轨迹进行对比,获取列车的实时运行位置;
15、基于所述列车的实时运行位置和所述最终预测位置确定所述列车的实时行驶方向。
16、在一个实施例中,所述平滑程度值的计算方式为:
17、获取列车距离当前时刻最近的连续个历史时刻的最终预测位置;
18、按照时间先后顺序依次连接个最终预测位置,计算各相邻最终预测位置之间连线的角度值,并获取所有角度值的平均值;
19、获取列车第时刻的最终预测位置、第时刻的位置与第时刻所对应的第一预测位置三者之间的连线角度值的平均值;
20、获取列车第时刻的最终预测位置、第时刻的位置与第时刻所对应的第二预测位置三者之间的连线角度值的平均值;
21、将与差值的绝对值作为第一预测位置的平滑程度值;
22、将与差值的绝对值作为第二预测位置的平滑程度值。
23、在一个实施例中,所述对所述第一预测位置和所述第二预测位置进行加权求和以获取所述列车在下一时刻的最终预测位置包括:
24、对第一预测位置的权重和第二预测位置的权重进行归一化处理,获取第一预测位置的权重比和第二预测位置的权重比;
25、所述第一预测位置的权重比满足关系式:
26、
27、所述第二预测位置的权重比满足关系式:
28、
29、基于所述第一预测位置的权重比和第二预测位置的权重比对所述第一预测位置和所述第二预测位置进行加权求和,获得所述列车在下一时刻的最终预测位置。
30、在一个实施例中,所述列车的位置由三维坐标确定,所述最终预测位置的计算方法为:
31、将与第一预测位置中的三个坐标值分别相乘后,得到第一预测点位的权重坐标;
32、将与第二预测位置中的三个坐标值分别相乘后,得到第二预测点位的权重坐标;
33、对第一预测点位的权重坐标和第二预测点位的权重坐标进行相加得到最终预测位置,所述最终预测位置的坐标为:
34、
35、其中,为在第时刻下第一预测点位的空间坐标,为在第时刻下第二预测点位的空间坐标。
36、在一个实施例中,所述对所述预测轨迹进行修正包括:
37、使所述预测轨迹的起点和离线版轨迹的相同位置点重合,然后旋转所述预测轨迹,使所述预测轨迹与离线版轨迹保持最大化重合。
38、在一个实施例中,旋转所述预测轨迹的旋转角度的获取方式为:
39、计算最终预测位置与离线版轨迹重合的重合度权重,满足关系式:
40、
41、在不同旋转角度下,对与离线版轨迹重合的所有最终预测位置的重合度权重进行累加获得最大累加值;
42、以所述最大累加值对应的旋转角度旋转所述预测轨迹,获得最终预测轨迹。
43、有益效果
44、1、结合神经网络模型和加速计算公式,在离线状态下实现列车在下一时刻位置的预测,以此获取预测轨迹,并与离线版轨迹进行比对,最终实现行驶方向的确定,当列车在行驶过程中突然发生离线状况时,能够进一步提升列车的安全性。
45、2、行驶方向的判断方法中具备第一预测位置和第二预测位置的初次校正,并且依据校正后的最终预测位置生成预测轨迹,在获得最终预测轨迹时,还对预测轨迹进行了校正,多角度的预测信息校正有效保证了最终预测轨迹的可取性,提高了对矿内货运列车的行驶方向进行获取的准确性。
技术特征:1.一种基于深度学习的矿内货运列车行驶方向判断方法,其特征在于:
2.如权利要求1所述的一种基于深度学习的矿内货运列车行驶方向判断方法,其特征在于,所述平滑程度值的计算方式为:
3.如权利要求1所述的一种基于深度学习的矿内货运列车行驶方向判断方法,其特征在于,所述对所述第一预测位置和所述第二预测位置进行加权求和以获取所述列车在下一时刻的最终预测位置包括:
4.如权利要求3所述的一种基于深度学习的矿内货运列车行驶方向判断方法,其特征在于,所述列车的位置由三维坐标确定,所述最终预测位置的计算方法为:
5.权利要求1-4任意一项所述的一种基于深度学习的矿内货运列车行驶方向判断方法,其特征在于,所述对所述预测轨迹进行修正包括:
6.权利要求5所述的一种基于深度学习的矿内货运列车行驶方向判断方法,其特征在于,旋转所述预测轨迹的旋转角度的获取方式为:
技术总结本发明涉及列车驾驶技术领域,尤其涉及一种基于深度学习的矿内货运列车行驶方向判断方法,该方法包括:获取列车的第一预测位置和第二预测位置,然后对第一预测位置和第二预测位置加权求和,获取最终预测位置,依据最终预测位置生成预测轨迹,对预测轨迹修正后获取最终预测轨迹,从而确定列车的行驶方向。本发明具备第一预测位置和第二预测位置的初次校正,并且依据校正后的最终预测位置生成预测轨迹,再获得最终预测轨迹时,还对预测轨迹进行了校正,多角度的预测信息校正有效保证了最终预测轨迹的可取性,提高了对矿内货运列车的行驶方向进行获取的准确性。技术研发人员:杨静,裴立军,张付岗,王栋,崔海娥受保护的技术使用者:山西阳光三极科技股份有限公司技术研发日:技术公布日:2024/3/31本文地址:https://www.jishuxx.com/zhuanli/20240718/233245.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。