一种自动调车系统和自动调车方法与流程
- 国知局
- 2024-08-01 08:46:18
本发明涉及一种自动调车系统和自动调车方法。
背景技术:
1、在车站调车业务中,不论是机车牵引、机车推送、摘编、解编,都需要人工进行观察,确定机车当前位置、前方目标距离,确保调车作业安全进行。在目前的自动调车方案中,为实现调车的自动运行功能,需要有一种手段能够替代人工观察的功能,确定机车位置和前方目标距离,特别是对于信号系统无法定位的前方目标,例如存车。对于机车牵引作业(机车运行前方没有挂车辆),可以在车头前方安装探测设备(激光雷达、摄像头等)进行前方目标的检测,从而确定前方目标距离、以及摘挂钩作业是否成功实施。而对于推送作业(机车运行前方挂有车辆),由于机车头前方被车辆遮挡,在车头前方安装探测设备不可行。对于这种情况,目前有一种已经实施过的方案,对车辆的车钩进行改造,将车钩由纯机械车钩改造成可进行电力、信息传输的车钩。这样改造之后,就可以在所有的车辆上安装探测设备,进行电力和信息的传输,从而达到探测前方目标、摘挂钩作业确认的目的。但是这种方案涉及到探测设备安装、车辆的改造,特别是对于车辆改造,需要专业的车辆厂进行车辆设计、改造,技术难度较大,改造成本非常高,
2、这里的陈述仅提供与本发明有关的背景技术,而并不必然地构成现有技术。
技术实现思路
1、本发明的目的在于提供一种自动调车系统和自动调车方法,提升了自动调车的智能化水平,减少了车辆设计和改造成本。
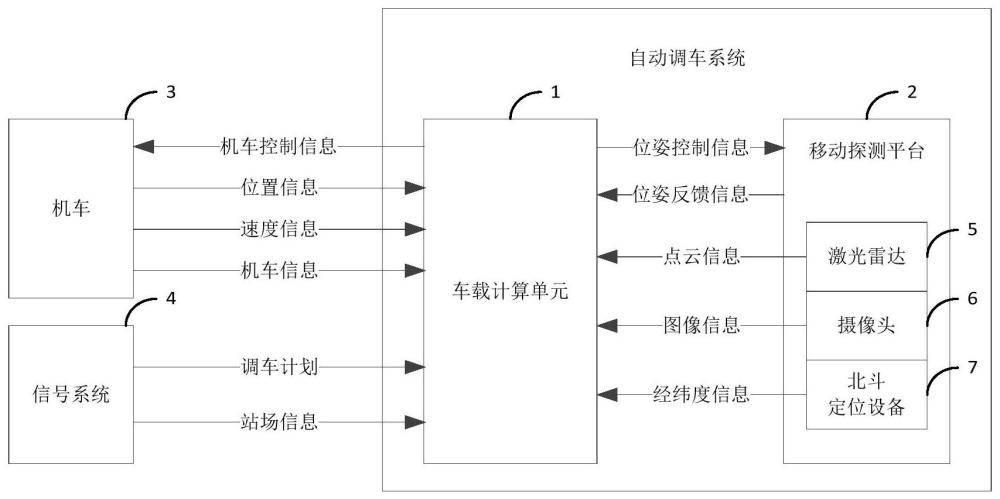
2、为了达到上述目的,本发明提供一种自动调车系统,包含:车载计算单元和移动探测平台,所述车载计算单元和移动探测平台之间通过无线方式进行通信,所述车载计算单元控制所述移动探测平台的位姿,使其朝向车列前进方向进行目标物探测,所述车载计算单元根据所述移动探测平台的探测信息控制机车走行和停止。
3、所述移动探测平台的平台载体上搭载激光雷达、摄像头和北斗定位设备,所述激光雷达用于采集点云信息,所述摄像头用于采集图像视频信息,所述北斗定位设备用于采集经纬度信息,所述激光雷达、摄像头和北斗定位设备都通过无线通信的方式与所述车载计算单元直接通信。
4、所述移动探测平台的平台载体采用无人机或机器狗。
5、所述车载计算单元安装于机车上,利用机车为所述车载计算单元供电。
6、所述车载计算单元通过无线通信方式从安装在车站的信号系统收集调车计划和站场信息。
7、本发明还提供一种自动调车方法,包含:
8、车载计算单元利用调车计划和站场信息计算得到机车的当前作业阶段和机车前进方向;
9、车载计算单元控制移动探测平台进行姿态转换并移动到指定位置,移动探测平台在指定位置进行目标物探测,将探测数据发送给车载计算单元;
10、车载计算单元利用移动探测平台在指定位置获得的点云数据和图像视频信息计算识别出机车车列前端与前方存车之间的距离;
11、车载计算单元控制机车推送车辆运行,直至机车车列前端与存车挂钩。
12、当所述移动探测平台的平台载体采用无人机,车载计算单元控制无人机飞行到机车车列前方,采用悬浮飞行模式,在机车车列运行侧面悬浮飞行,探测方向朝向机车车列和机车车列前方,进行目标物探测。
13、当所述移动探测平台的平台载体采用机器狗,车载计算单元控制机器狗走行到机车车列前方,攀爬到机车车列的最前方车辆上,利用电磁吸附于车辆的顶端、侧面或者前端,探测方向朝向机车车列前进方向,进行目标物探测。
14、车载计算单元利用摄像头采集的图像视频信息或激光雷达采集的点云信息来识别车钩状态,如果车钩是张开状态,则车钩为解挂状态,如果车钩是闭合状态,则车钩为连挂状态。
15、确认车钩为连挂状态后,车载计算单元控制机车反向运行,如果车钩状态仍然为连挂状态,则确定机车车列前端与存车挂钩成功,如果机车车列前端与存车之间的距离变大,则挂钩失败,重新进行挂钩。
16、车载计算单元利用摄像头采集的图像视频信息或激光雷达采集的点云信息来识别车钩插销状态处于插入状态还是拔出状态。
17、本发明具有以下有益效果:
18、1、充分利用人工智能进行目标识别和测距定位,极大提升了自动调车的智能化水平。
19、2、利用可移动的探测平台,避免了在机车上安装探测设备,大大减少了机车改造的工作和成本。
20、3、采用可移动的探测平台可以保证每套自动调车只需要配置一台探测平台,而不需要配置多台探测设备,减少了设备成本。
21、4、采用可灵活移动的探测平台,避免了对数量庞大的车辆进行改造,极大地消减了车辆设计和改造成本,为运营方节省了大量的成本。
技术特征:1.一种自动调车系统,其特征在于,包含:车载计算单元和移动探测平台,所述车载计算单元和移动探测平台之间通过无线方式进行通信,所述车载计算单元控制所述移动探测平台的位姿,使其朝向车列前进方向进行目标物探测,所述车载计算单元根据所述移动探测平台的探测信息控制机车走行和停止。
2.如权利要求1所述的自动调车系统,其特征在于,所述移动探测平台的平台载体上搭载激光雷达、摄像头和北斗定位设备,所述激光雷达用于采集点云信息,所述摄像头用于采集图像视频信息,所述北斗定位设备用于采集经纬度信息,所述激光雷达、摄像头和北斗定位设备都通过无线通信的方式与所述车载计算单元直接通信。
3.如权利要求2所述的自动调车系统,其特征在于,所述移动探测平台的平台载体采用无人机或机器狗。
4.如权利要求1所述的自动调车系统,其特征在于,所述车载计算单元安装于机车上,利用机车为所述车载计算单元供电。
5.如权利要求1所述的自动调车系统,其特征在于,所述车载计算单元通过无线通信方式从安装在车站的信号系统收集调车计划和站场信息。
6.一种利用如权利要求1-5中任意一项所述的自动调车系统进行的自动调车方法,其特征在于,包含:
7.如权利要求6所述的自动调车方法,其特征在于,当所述移动探测平台的平台载体采用无人机,车载计算单元控制无人机飞行到机车车列前方,采用悬浮飞行模式,在机车车列运行侧面悬浮飞行,探测方向朝向机车车列和机车车列前方,进行目标物探测。
8.如权利要求6所述的自动调车方法,其特征在于,当所述移动探测平台的平台载体采用机器狗,车载计算单元控制机器狗走行到机车车列前方,攀爬到机车车列的最前方车辆上,利用电磁吸附于车辆的顶端、侧面或者前端,探测方向朝向机车车列前进方向,进行目标物探测。
9.如权利要求6所述的自动调车方法,其特征在于,车载计算单元利用摄像头采集的图像视频信息或激光雷达采集的点云信息来识别车钩状态,如果车钩是张开状态,则车钩为解挂状态,如果车钩是闭合状态,则车钩为连挂状态。
10.如权利要求9所述的自动调车方法,其特征在于,确认车钩为连挂状态后,车载计算单元控制机车反向运行,如果车钩状态仍然为连挂状态,则确定机车车列前端与存车挂钩成功,如果机车车列前端与存车之间的距离变大,则挂钩失败,重新进行挂钩。
11.如权利要求9所述的自动调车方法,其特征在于,车载计算单元利用摄像头采集的图像视频信息或激光雷达采集的点云信息来识别车钩插销状态处于插入状态还是拔出状态。
技术总结一种自动调车系统和自动调车方法,车载计算单元利用调车计划和站场信息计算得到机车的当前作业阶段和机车前进方向,车载计算单元控制移动探测平台进行姿态转换并移动到指定位置,移动探测平台在指定位置进行目标物探测,将探测数据发送给车载计算单元,车载计算单元利用移动探测平台在指定位置获得的点云数据和图像视频信息计算识别出机车车列前端与前方存车之间的距离,车载计算单元控制机车推送车辆运行,直至机车车列前端与存车挂钩。本发明提升了自动调车的智能化水平,减少了车辆设计和改造成本。技术研发人员:岳锦俞,季志均,陈智新受保护的技术使用者:卡斯柯信号有限公司技术研发日:技术公布日:2024/3/27本文地址:https://www.jishuxx.com/zhuanli/20240718/233233.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表