一种基于速度差值的机车定速控制方法及机车控制系统与流程
- 国知局
- 2024-08-01 08:46:40
本发明涉及机车速度控制,尤其是涉及一种基于速度差值的机车定速控制方法及机车控制系统。
背景技术:
1、工矿企业采用铁路运输无人驾驶系统,可提高运输安全性,降低运输成本,有助于提高企业的竞争力和可持续发展能力。无人驾驶系统的运行速度精准控制至关重要,直接关系到系统行驶安全。电动轨道机车因其污染少、噪音小、成本低、性能好等优点,更适用于工矿企业。为了确保电动轨道机车在无人驾驶系统中安全可靠、满足运输需求,定速控制技术成为其关键的控制策略之一。电动轨道机车定速控制的目标在于精确地控制机车的运行速度,以适应铁路线路的曲线、坡度和其他特殊条件,提高行车的平稳性和运输效率。定速控制不仅仅是简单地维持机车的目标速度,还需要考虑到各种外部因素对机车速度的影响,如风速、曲线半径、坡度等。因此,该控制系统需要智能化的算法和准确的传感器来实现。
2、当前电动轨道机车定速控制技术面临的问题主要包括对复杂运行环境的适应性不足、控制精度有待提高以及系统的实时性和可靠性等方面。
3、现有技术主要包括基于pid控制、模型预测控制(mpc)、动态矩阵控制(dmc)以及模糊控制等多种方法。基于pid控制的电动轨道机车定速技术是最常见的一种方法,通过调节比例、积分和微分三个参数,实现对机车速度的闭环控制。然而,pid控制受到系统非线性和时变性的限制,在应对复杂线路和突发状况时表现不佳。模型预测控制(mpc)通过建立系统的数学模型,预测未来一段时间内的系统响应,然后进行优化以制定控制策略。尽管mpc在处理多变量系统和约束条件上表现较好,但其计算复杂度较高,实时性较差。而动态矩阵控制(dmc)是一种基于过程模型的控制方法,通过更新动态矩阵来调整控制策略,dmc对于多变量系统和约束条件有较好的适应性,但需要较为准确的系统模型,模型误差容易导致控制性能下降。
4、现有技术普遍存在的不足主要包括对复杂运行环境适应性不足、控制精度待提高、系统实时性和可靠性有待增强等方面。在电动轨道机车行驶过程中,可能面临曲线、坡度、风速等多变因素,传统控制方法对这些复杂环境的适应性相对较差,容易导致不稳定或控制性能下降。此外,由于机车系统的非线性和时变性,现有技术在控制精度上仍有提升空间,特别是在高速和高精度要求的运输场景。同时,一些技术在实时性和可靠性方面仍有待增强,以满足现代铁路运输对实时性的要求。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种基于速度差值的机车定速控制方法及机车控制系统。
2、第一方面,本发明提供了一种基于速度差值的机车定速控制方法,该方法包括:
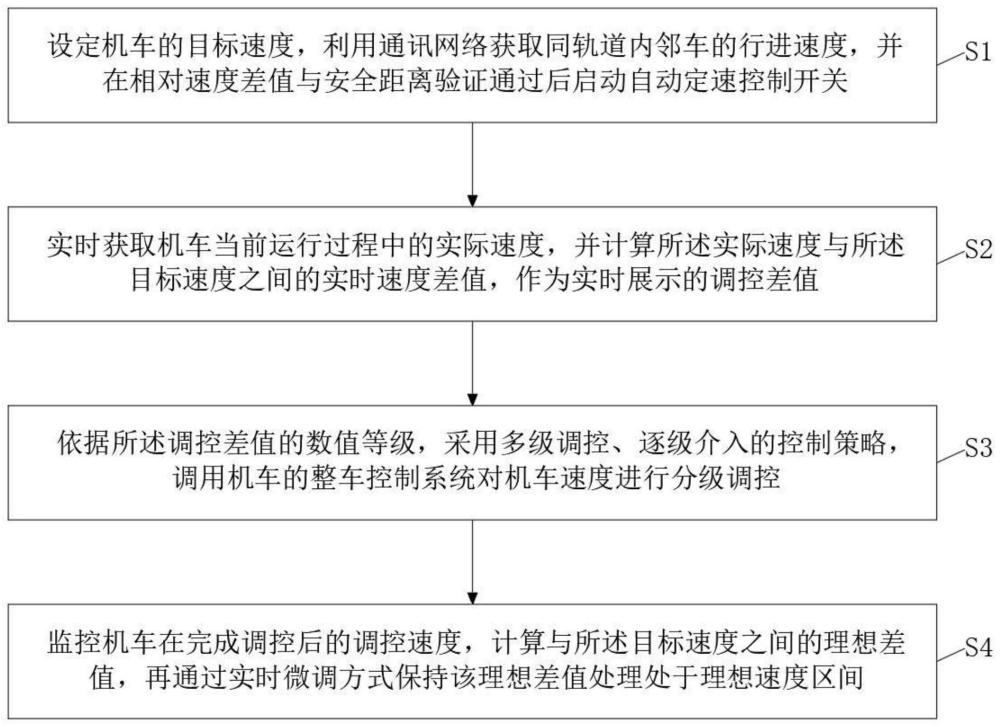
3、s1、设定机车的目标速度,利用通讯网络获取同轨道内邻车的行进速度,并在相对速度差值与安全距离验证通过后启动自动定速控制开关;
4、s2、实时获取机车当前运行过程中的实际速度,并计算实际速度与目标速度之间的实时速度差值,作为实时展示的调控差值;
5、s3、依据调控差值的数值等级,采用多级调控、逐级介入的控制策略,调用机车的整车控制系统对机车速度进行分级调控;
6、s4、监控机车在完成调控后的调控速度,计算与目标速度之间的理想差值,再通过实时微调方式保持该理想差值处理处于理想速度区间。
7、进一步的,利用通讯网络获取同轨道内邻车的行进速度,并在相对速度差值与安全距离验证通过后启动自动定速控制开关包括:
8、s11、优先计算同轨道内邻车与本机车之间的相邻距离,再计算邻车实时的行进速度与目标速度之间的相对速度差值;
9、s12、依据机车的动力学特性及其制动性能计算在目标车速下机车完全停止的制动距离,作为机车的安全距离;
10、s13、若当前机车的相邻距离小于安全距离,且相对速度差值满足安全差值要求,则目标速度验证通过,若当前机车的相邻距离大于安全距离,且相对速度差值不满足安全差值要求,则目标速度验证不通过,降低目标速度直至满足安全差值要求。
11、进一步的,依据调控差值的数值等级,采用多级调控、逐级介入的控制策略,调用机车的整车控制系统对机车速度进行分级调控包括:
12、s31、将当前机车的调控差值输入等级划分规则进行比对,依据调控差值的数值所位于的速度区间,选择调用相应级别的调控策略;
13、s32、当调用第一级别调控策略时,利用大差值驱动策略调整机车的电机扭矩,通过一级扭矩输出将实际速度调控至二级速度区间;
14、s33、当调用第二级别调控策略时,通过机车制动力及阻力参数结合的驱动策略对电机扭矩进行比例调整,将实际速度调控至三级速度区间;
15、s34、当调用第三级别调控策略时,综合多项机车速度评估指标,利用综合控制策略对电机扭矩进行微分调控,达到目标速度的理想速度区间。
16、进一步的,利用大差值驱动策略调整机车的电机扭矩,通过一级扭矩输出将实际速度调控至二级速度区间包括:
17、s321、获取机车当前运行状态下的电池状态数据、电机状态数据及油门踏板信号,依据电池状态数据计算机车当前的可控扭矩上限;
18、s322、提取油门踏板信号中的油门踏板开合度,将该油门踏板开合度的百分比值与机车电机的峰值扭矩的乘积作为油门需求扭矩;
19、s323、选择可控扭矩上限与油门需求扭矩两者中的最小值作为当前机车电机的扭矩输出,并在进行平滑处理后作为最终的一级目标扭矩,通过数据总线发送至电机控制器执行电机驱动响应;
20、s324、通过一级目标扭矩执行机车加速行驶,实时监控机车的目标速度,直至到达二级速度区间,反馈提醒并调用第二级别调控策略。
21、进一步的,依据电池状态数据计算机车当前的可控扭矩上限包括:
22、s3211、获取电池状态数据中的当前电池电压,将当前电池电压与电池允许放电电流相乘得到电池允许放电最大功率;
23、s3212、选取允许放电最大功率的75%作为电机允许输出功率,在将该电机允许输出功率与9550的乘积再除以当前电机的转速,得到机车当前的可控扭矩上限。
24、进一步的,通过机车制动力及阻力参数结合的驱动策略对电机扭矩进行比例调整,将实际速度调控至三级速度区间包括:
25、s331、获取机车当前运行状态下的制动力与阻力参数,利用机车的牵引力、制动力及阻力参数之间的关联关系计算二级目标扭矩;
26、s332、监控获得机车当前运行状态下的实际扭矩,将二级目标扭矩减去实际扭矩的扭矩差值作为电机扭矩调整量;
27、s333、计算比例系数,通过比例系数计算机车的二级扭矩输出,通过下达指令对机车的电机进行转速调整,二级扭矩输出的计算公式为:
28、
29、式中,stwo表示二级扭矩输出;s0表示机车当前的实际扭矩;wtwo表示二级目标扭矩;p表示比例系数;nmin与nmax分别表示机车电机的可控扭矩下限与可控扭矩上限;
30、s334、设定二级目标扭矩的计算周期,通过迭代的方式进行调整,持续性监控机车当前的实际速度与实际扭矩,并周期性计算二级扭矩输出进行电机扭矩调整,直至实际速度到达三级速度区间。
31、进一步的,获取机车当前运行状态下的制动力与阻力参数,利用机车的牵引力、制动力及阻力参数之间的关联关系计算二级目标扭矩包括:
32、s3311、利用机车内置的牵引力传感器与制动力传感器获取机车当前运行状态下的牵引力与制动力;
33、s3312、获取机车的整车整备重量、荷载重量与整车基本阻力,依次计算机车的行驶风阻与轨道阻力,通过将整车基本阻力、行驶风阻与轨道阻力相加之和作为机车当前运行状态下的阻力参数;
34、s3313、利用机车当前的实际速度对应条件下的牵引力依次减去制动力与阻力参数的差计算机车待调控的二级目标扭矩。
35、进一步的,综合多项机车速度评估指标,利用综合控制策略对电机扭矩进行微分调控,达到目标速度的理想速度区间包括:
36、s341、利用车载传感器获取机车运行状态下的多项评估指标,评估指标包括轨道曲率、轨道坡度、风向风速、轨道阻力、紧急制动参数、机车整车整备重量及机车荷载重量;
37、s342、根据评估指标定义多组模糊变量,为每个模糊变量定义相应的模糊集合,并确定隶属函数,再将电机扭矩定义为输出变量,同时为输出变量定义模糊集合与相应的隶属函数;
38、s343、基于数据驱动制定模糊规则,关联模糊变量与输出变量;
39、s344、依据输入的评估指标、实际速度及当前电机扭矩,利用模糊预测控制器对电机扭矩的调控力度进行预测与校正,实现模糊输出;
40、s345、对模糊输出进行去模糊化,转换为确定性的数值后计算电机扭矩的调整量,作为三级扭矩输出对电机扭矩进行微分调控;
41、s346、通过迭代的方式进行调整,不断监测实际速度,应用模糊预测控制器计算新的三级扭矩输出,直至实际速度到达理想速度区间。
42、进一步的,利用模糊预测控制器对电机扭矩的调控力度进行预测与校正,实现模糊输出包括:
43、s3441、设定预测周期,在当前预测周期根据输入的机车的实际速度与评估指标,利用模糊规则进行推理,预测得到下一个预测周期的预测速度;
44、s3442、计算当前实际速度值下一个预测周期的预测速度之间的扭矩增量,通过反馈校正的方式计算利用该扭矩增量的条件下,机车在下一个预测周期能达到的校正速度,再计算预测速度与校正速度之间的误差值;
45、s3443、记录每个预测周期的误差值,并计算相邻两个预测周期的误差变化率,再将误差值与误差变化率作为输入变量,利用预设的模糊控制规则进行关联匹配,实现模糊输出。
46、第二方面,本发明还提供了一种基于速度差值的机车控制系统,该控制系统包括:定速设定模块、差值展示模块、分级调控模块及监控调优模块,其中:
47、定速设定模块,用于设定机车的目标速度,利用通讯网络获取同轨道内邻车的行进速度,并在相对速度差值与安全距离验证通过后启动自动定速控制开关;
48、差值展示模块,用于实时获取机车当前运行过程中的实际速度,并计算实际速度与目标速度之间的实时速度差值,作为实时展示的调控差值;
49、分级调控模块,用于依据调控差值的数值等级,采用多级调控、逐级介入的控制策略,调用机车的整车控制系统对机车速度进行分级调控;
50、监控调优模块,用于监控机车在完成调控后的调控速度,计算与目标速度之间的理想差值,再通过实时微调方式保持该理想差值处理处于理想速度区间。
51、本发明的有益效果为:
52、1、通过实时获取与邻车的相对速度差值和安全距离的验证,实现了自适应的定速控制,有效避免了车辆之间相对速度变化导致的潜在冲突,提高了行车的安全性;而通过实时计算实际速度与目标速度的速度差值,并采用多级调控策略,在不同情况下能够灵活调整机车的速度,以适应复杂多变的行车环境,增强了系统的稳定性和适应性;而通过实时微调方式保持理想差值处于理想速度区间,能够在动态运行中对车速进行精准控制,提高了整体的行车平稳性和舒适性,从而具备了智能化的适应性和安全性,有效克服了传统控制方法在复杂环境下的局限性,提高铁路运输系统的运行效率和安全性。
53、2、通过依据调控差值的数值等级采用多级调控、逐级介入的控制策略,调用机车的整车控制系统对机车速度进行分级调控,能够更加精细地对机车速度进行调整,适应不同的行车场景,从而提高了整体行车的稳定性;当采用大差值驱动策略调整电机扭矩,使机车能够快速响应于较大的速度偏差,有效地缩短了速度调整的响应时间,提高了系统的实时性;当通过机车制动力及阻力参数结合的比例调整,对电机扭矩进行精准控制,不仅在速度调整的过程中实现了平稳过渡,还减小了能耗,提高了能效;当综合多项机车速度评估指标,并采用综合控制策略进行微分调控,使得机车在实现目标速度的同时考虑了更多的影响因素,提高了系统的智能化水平,更好地适应了复杂多变的行车环境。
本文地址:https://www.jishuxx.com/zhuanli/20240718/233272.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。