一种机器人底盘避碰结构的制作方法
- 国知局
- 2024-08-02 16:27:58
本申请涉及机器人底盘,更具体地说,涉及一种机器人底盘避碰结构。
背景技术:
1、机器人(robot)是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,而机器人底盘,就是机器人的底部的重要组成部分,在使用时,具有带动机器人主体移动的作用。
2、根据检索发现,专利公开号为cn113319851a的中国专利公开了一种机器人底盘避碰结构,包括底盘架,所述底盘架沿着宽度方向两侧的中心处均设置有主移动轮,所述底盘架沿着宽度方向的两侧且位于主移动轮的两侧均设置有副移动轮,所述底盘架的外侧且与副移动轮的位置相对应处对称设置有支架,所述底盘架沿着长度方向的两侧均安装有避碰机构,所述底盘架顶部的四个拐角处均设置有避碰雷达,本发明中,通过设置的机器人底盘避碰结构,利用避碰雷达和避碰机构的配合,大大提高了机器人移动时的安全性,避免碰撞对自身内部元件产生的伤害,也防止撞伤他人的可能性,而防撞条和避碰条的设计则起到对碰撞时的力起到缓冲的作用,加强了机器人底盘防碰撞的性能。
3、针对上述中的相关技术,申请人认为,上述的机器人底盘通过避碰雷达的安装实现避碰效果,并且同时通过缓冲弹簧和避碰板来进行缓冲,从而进行防护,但是在受到碰撞时,缓冲弹簧虽然会收缩进行缓冲,但是弹簧收缩缓冲之后具有反弹反作用力,而上述底盘并没有对反作用力进行处理,因此在底盘和机器人较轻的情况下,缓冲弹簧较大反作用力的释放会容易导致底盘出现侧翻的情况,从而影响机器人主体,为此我们提出一种机器人底盘避碰结构。
技术实现思路
1、为了解决上述问题,本申请提供一种机器人底盘避碰结构,采用如下的技术方案:
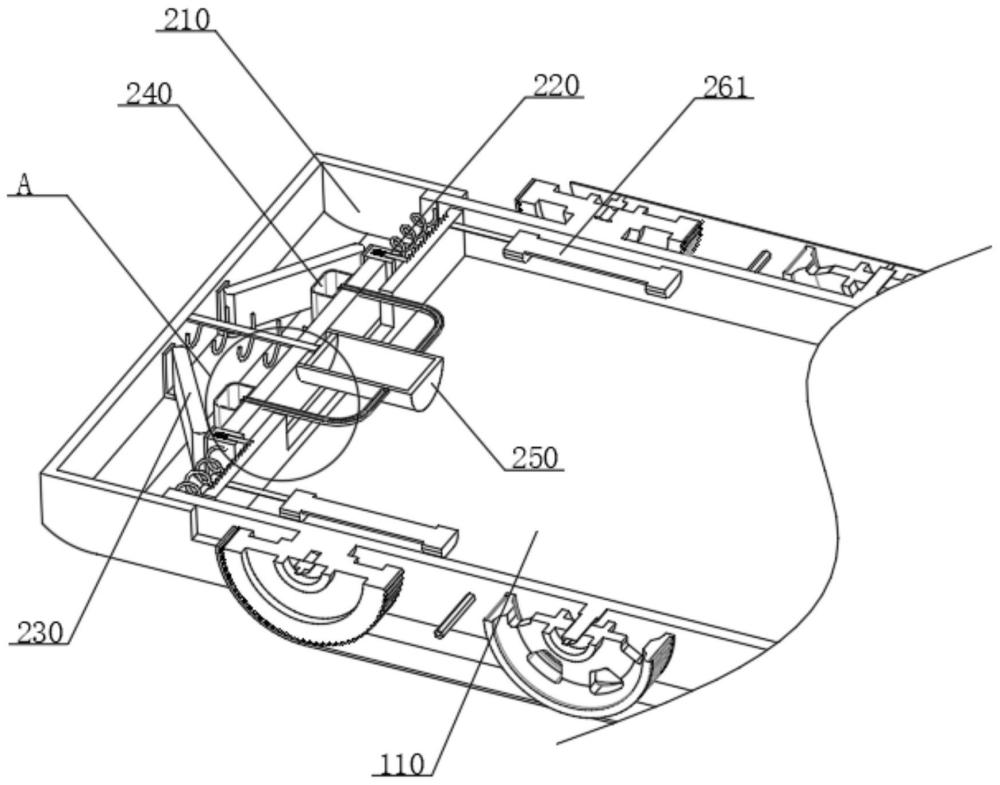
2、一种机器人底盘避碰结构,包括主体模块和两个缓冲模块,所述主体模块包括底盘主体,所述底盘主体的两侧均设置有移动履带,所述底盘主体的顶部设置有四个避碰雷达,四个所述避碰雷达呈矩形分布,两个所述缓冲模块分别设置在底盘主体的前端面和后端面,所述缓冲模块包括活动连接在底盘主体前端面的防护壳,所述底盘主体的前端面的两侧均设置有缓冲组件,两个所述缓冲组件与防护壳内壁的前端面之间均铰接有衔接板,两个所述衔接板呈倾斜设置,所述底盘主体的前端面固定连接有两个缓冲气囊,两个所述缓冲气囊分别位于两个衔接板的后方,所述防护壳内壁的前端面与底盘主体的前端面之间设置有缓冲加压组件,所述缓冲加压组件与两个缓冲气囊连接,所述底盘主体内壁的两侧之间设置有锁定组件,两个所述缓冲组件均与锁定组件连接。
3、进一步的,所述缓冲组件包括开设在底盘主体前端面一侧的滑槽,所述滑槽的内部滑动连接有h形滑块,所述h形滑块与滑槽内壁的一端之间固定连接有第一缓冲弹簧,其中一个所述衔接板的一端与h形滑块的前端面铰接。
4、通过采用上述技术方案,使得在防护壳受到碰撞时,将会通过两个衔接板来推动h型滑块按压第一缓冲弹簧进行缓冲。
5、进一步的,所述缓冲组件还包括开设在h形滑块后端面的安装槽,所述安装槽的内部滑动连接有棘齿块,所述棘齿块的一端与安装槽内壁的一端之间固定连接有卡接弹簧。
6、通过采用上述技术方案,使得对棘齿块进行安装,便于后续的自锁。
7、进一步的,所述锁定组件包括两个分别固定连接在底盘主体内壁两侧的电推杆,两个所述电推杆的输出轴之间固定连接有中空板,所述中空板前端面的两侧均开设有棘轮槽,所述棘齿块的另一端活动连接在其中一个棘轮槽的内部。
8、通过采用上述技术方案,使得棘齿块与棘轮槽进行配合,从而可以进行自锁。
9、进一步的,所述缓冲加压组件包括固定连接在底盘主体内壁前端面的加压筒,所述防护壳内壁的后端面固定连接有压杆,所述压杆的一端延伸至加压筒的内部并固定连接有活塞块,所述活塞块活动连接在加压筒的内部,所述加压筒的外表面固定连接有两个衔接管,两个所述衔接管分别与两个缓冲气囊连接。
10、通过采用上述技术方案,通过两个缓冲气囊的设置,可以对衔接板进行缓冲。
11、进一步的,所述缓冲加压组件还包括固定连接在防护壳内壁前端面和底盘主体前端面之间的第二缓冲弹簧,所述第二缓冲弹簧位于压杆的外部。
12、通过采用上述技术方案,通过第二缓冲弹簧可以对防护壳进行进一步缓冲,同时便于带动后续活塞块进行复位。
13、进一步的,所述缓冲模块还包括四个分别开设在底盘主体顶部和底部的限位滑槽,四个所述限位滑槽的内部均滑动连接有限位滑块,四个所述限位滑块分别与防护壳内壁的顶部和底部固定连接。
14、通过采用上述技术方案,可以对防护壳进行限位,让其活动时更加稳定。
15、进一步的,所述主体模块还包括开设在底盘主体顶部且位于四个避碰雷达之间的主体安装槽,所述主体安装槽内壁的底部开设有四个安装螺孔,四个所述安装螺孔呈矩形分布。
16、通过采用上述技术方案,使得可以对机器人主体进行安装。
17、综上所述,本申请包括以下有益技术效果:
18、(1)本申请通过缓冲组件、衔接板、缓冲气囊、缓冲加压组件和锁定组件的设置,使得通过缓冲组件和锁定组件之间的配合,在缓冲组件、缓冲气囊和缓冲加压组件对冲击力进行吸收后,可以对缓冲组件、缓冲气囊和缓冲加压组件的状态进行锁定,从而避免反作用力导致的底盘主体侧翻,进而避免侧翻影响安装的机器人主体,提升本底盘安全性;
19、(2)本申请通过第二缓冲弹簧、缓冲气囊和第一缓冲弹簧的设置,可以进行多重缓冲,从而避免冲击力较大导致机器人主体内部零件受到影响,进而提升缓冲效果。
技术特征:1.一种机器人底盘避碰结构,包括主体模块(100)和两个缓冲模块(200),其特征在于:所述主体模块(100)包括底盘主体(110),所述底盘主体(110)的两侧均设置有移动履带(120),所述底盘主体(110)的顶部设置有四个避碰雷达(150),四个所述避碰雷达(150)呈矩形分布,两个所述缓冲模块(200)分别设置在底盘主体(110)的前端面和后端面;
2.根据权利要求1所述的一种机器人底盘避碰结构,其特征在于:所述缓冲组件(220)包括开设在底盘主体(110)前端面一侧的滑槽,所述滑槽的内部滑动连接有h形滑块(221),所述h形滑块(221)与滑槽内壁的一端之间固定连接有第一缓冲弹簧(222),其中一个所述衔接板(230)的一端与h形滑块(221)的前端面铰接。
3.根据权利要求2所述的一种机器人底盘避碰结构,其特征在于:所述缓冲组件(220)还包括开设在h形滑块(221)后端面的安装槽,所述安装槽的内部滑动连接有棘齿块(223),所述棘齿块(223)的一端与安装槽内壁的一端之间固定连接有卡接弹簧(224)。
4.根据权利要求3所述的一种机器人底盘避碰结构,其特征在于:所述锁定组件(260)包括两个分别固定连接在底盘主体(110)内壁两侧的电推杆(261),两个所述电推杆(261)的输出轴之间固定连接有中空板(262),所述中空板(262)前端面的两侧均开设有棘轮槽(263),所述棘齿块(223)的另一端活动连接在其中一个棘轮槽(263)的内部。
5.根据权利要求4所述的一种机器人底盘避碰结构,其特征在于:所述缓冲加压组件(250)包括固定连接在底盘主体(110)内壁前端面的加压筒(251),所述防护壳(210)内壁的后端面固定连接有压杆(252),所述压杆(252)的一端延伸至加压筒(251)的内部并固定连接有活塞块(253),所述活塞块(253)活动连接在加压筒(251)的内部,所述加压筒(251)的外表面固定连接有两个衔接管(254),两个所述衔接管(254)分别与两个缓冲气囊(240)连接。
6.根据权利要求5所述的一种机器人底盘避碰结构,其特征在于:所述缓冲加压组件(250)还包括固定连接在防护壳(210)内壁前端面和底盘主体(110)前端面之间的第二缓冲弹簧(255),所述第二缓冲弹簧(255)位于压杆(252)的外部。
7.根据权利要求6所述的一种机器人底盘避碰结构,其特征在于:所述缓冲模块(200)还包括四个分别开设在底盘主体(110)顶部和底部的限位滑槽(270),四个所述限位滑槽(270)的内部均滑动连接有限位滑块(280),四个所述限位滑块(280)分别与防护壳(210)内壁的顶部和底部固定连接。
8.根据权利要求7所述的一种机器人底盘避碰结构,其特征在于:所述主体模块(100)还包括开设在底盘主体(110)顶部且位于四个避碰雷达(150)之间的主体安装槽(130),所述主体安装槽(130)内壁的底部开设有四个安装螺孔(140),四个所述安装螺孔(140)呈矩形分布。
技术总结本申请公开了一种机器人底盘避碰结构,属于机器人底盘技术领域,包括主体模块和两个缓冲模块,所述主体模块包括底盘主体,所述底盘主体的两侧均设置有移动履带,所述底盘主体的顶部设置有四个避碰雷达,四个所述避碰雷达呈矩形分布,两个所述缓冲模块分别设置在底盘主体的前端面和后端面,所述缓冲模块包括活动连接在底盘主体前端面的防护壳,使得通过缓冲组件和锁定组件之间的配合,在缓冲组件、缓冲气囊和缓冲加压组件对冲击力进行吸收后,可以对缓冲组件、缓冲气囊和缓冲加压组件的状态进行锁定,从而避免反作用力导致的底盘主体侧翻,进而避免侧翻影响安装的机器人主体,提升本底盘安全性。技术研发人员:段俊快受保护的技术使用者:无锡普菲特工业产品设计有限公司技术研发日:20231229技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240718/250812.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表