获知挂车耦联器的联接状态的方法、状态获知组件和车辆与流程
- 国知局
- 2024-08-02 16:31:10
本发明涉及用于获知挂车耦联器的联接状态的方法、用于执行该方法的状态获知组件以及具有这种状态获知组件的车辆,尤其是商用车辆。
背景技术:
1、如果挂车要经由挂车耦联器与牵引车耦接,即与牵引车能摆动地连接,则须对挂车耦联器准确锁定进行查验,也就是查验挂车耦联器的锁定状态是否也实际存在。现有的系统利用摄像头通过如下方式来做到这一点,即,根据所拍摄到的图像来直接确认所形成的连接是否存在。然而,在商用车辆中,挂车耦联器安装在车辆下方或挂车下方,从而有必要安装附加摄像头用来完整观察挂车耦联器。
2、此外,还已知有位置传感器或锁定传感器,利用它们来查验各自的锁定机构是否锁闭。然而,这不足以可靠确认,能摆动的连接是否实际存在,这是因为例如在栓式耦联器中,牵引扣眼例如可能从牵引钩口脱出,或者牵引钩口在牵引扣眼正确就位之前就锁定了。在手动运行的车辆中,能摆动的连接的实际存在性可以由驾驶员手动查验。然而,在全自动车辆中这是无法实现的,并且即使是在手动运行的车辆中,驾驶员也可能会遗漏这种查验步骤。
3、为此,由现有技术根据us20200361397 a1已知的是,借助摄像头、激光雷达传感器、雷达传感器或超声波传感器来获知在针对乘用车辆情况下挂车的准确耦接。在乘用车俩中,各自的传感器系统在此可以如上所述那样检测挂车耦联器的耦联元件。然而,在载重车辆中这不是总能实现的,从而无法像us20200361397 a1中那样仅仅通过调用各自的传感器系统就能够获知是否存在准确的能摆动的连接。
4、在de 10 2020 103 099 a1和de 10 2020 102 667 a1中分别描述了耦接辅助系统,在其中,摄像头对准耦联球体,以便控制牵引车与挂车之间的接近过程。在此,确定车辆行驶路线,并随后使车辆沿该车辆行驶路线行进。在这里,没有设置结合一个或多个传感器信号来验证,耦接过程是否实际上顺利或者挂车耦联器是否实际处于锁定位置。在de 102014 003 953 a1还描述了用于将挂车与牵引车耦联起来的辅助系统,其中,摄像头被用于获知在倒退行驶时挂车的牵引杆上的扣眼的位置。然后据此获知牵引车接近挂车所沿的轨迹,其中,并未检查挂车耦联器是否处于锁定状态。
5、在de 10 2019 007 662 a1中还描述了如何将牵引车和挂车调整至正确的高度,其中,为此动用摄像头、激光雷达传感器、雷达传感器或超声波传感器的传感器信号。在de10 2018 122 224 a1中描述了用于将牵引车和挂车耦联起来的监控单元,其中,为此监控车辆的运动。为此,由传感器装置对牵引车或挂车的运动信息进行评估。然而,没有对耦联是否准确完成进行查验。
6、在ep 1 580 043 b1中还描述了,在全挂车钩挂到牵引车上时,借助单个的传感器装置监控牵引钩口,通过该传感器装置能生成发送信号告知挂车的机械联接状态的信号。假如不存在准确联接,则挂入牵引车和/或挂车的制动器。在ep 0 794 110 b1中还描述了经由传感器进行锁定指示,该传感器测量锁定机构何时处于锁闭位置中。在de 102020 115065a1中,进行了对在挂车耦联器上的传感器销的定位的获知,以便获知耦联状态。
7、在de 10 2004 029 129 a1中还描述了摄像头的图像传感器,该图像传感器对与挂车耦联器相配属的闭锁元件的运动进行监控。如果闭锁元件指明挂车耦联器已锁定,则使牵引车减速。如果使用到具有用于探测挂车耦联器的打开状态的传感器的挂车耦联器,则当根据该传感器获知锁定状态时,也可以使牵引车减速。然而,在此,这两个传感器并未组合使用,以便获知实际的耦联状态。
技术实现思路
1、本发明任务在于提供一种方法和一种状态获知组件,利用它们可以进行对挂车耦联器的耦联状态的可靠获知和监控。任务还在于提供一种车辆。
2、该任务通过根据独立权利要求的方法、状态获知组件和车辆来解决。从属权利要求说明了优选的改进方案。
3、因而,根据本发明,设置有一种用于监控或获知牵引车与挂车之间的挂车耦联器的联接状态的方法,其中,在挂车耦联器的锁定状态下,在牵引车上的牵引车侧的耦联元件与挂车上的挂车侧的耦联元件之间构成能摆动的连接,优选是在牵引车与挂车之间不会发生间距变化的相对运动的情况下,其中,方法至少设置有以下步骤:
4、-获知联接信息,其中,联接信息依赖于挂车耦联器的锁定机构的位置和/或牵引车急动度和/或挂车急动度来表明:挂车耦联器是否可能处于锁定状态,其中,锁定机构被构造成在其锁闭位置中,在耦联元件相对于彼此准确定位的情况下,在耦联元件之间建立或维持有能摆动的连接;
5、-获知定位信息,其中,定位信息依赖于基于波的传感器装置的传感器信号来表明:挂车耦联器是否可能处于锁定状态,其中,结合基于波的传感器装置的传感器信号获知关于利用其检测到的、尤其是参与构成能摆动的连接的对象的姿态信息,并且由此推导出挂车耦联器是否可能处于锁定状态;并且
6、-依赖于联接信息和定位信息获知联接结果,其中,联接结果表明:经由挂车耦联器是否在牵引车与挂车之间构成能摆动的连接,或者挂车耦联器实际上是否处于锁定位置。
7、因此有利的是,动用了至少两种彼此无关地且作用也不同的测量原理,以便验证挂车耦联器的联接状态。由此确保,不会由于错误地获知的联接信息而输出错误的联接状态,这是因为只有当定位信息也指明同一联接状态时,才能够具有高可靠性地假定联接结果准确。因而,可以查验这些信息,即联接信息和定位信息的相互可信度,并然后才输出最终的联接结果。因此优选设置的是,如果联接信息和定位信息都表明:挂车耦联器处于锁定状态,则联接结果表明:大概率在牵引车与挂车之间构成了能摆动的连接,否则不是这种情况。
8、为此,优选动用基于波的传感器装置,即对在可见和不可见的波长范围内的波或辐射进行评估的传感器装置,例如通过摄像头对可见光、在激光雷达传感器的请下对激光辐射、在雷达传感器的情况下对雷达辐射以及在超声波传感器的情况下对超声波辐射进行评估。所有这些基于波的传感器装置都允许获知关于在周围环境中参与能摆动的连接的对象的姿态信息。
9、优选为此设置的是,获知定位信息具有以下步骤:
10、-通过基于波的传感器装置检测周围环境中的至少一个对象并输出传感器信号,其中,基于波的传感器装置布置在牵引车或挂车上,也就是说,它提供了对象的成像并且以传感器信号方式进行输出以用于进一步处理;
11、-获知检测到的对象的姿态信息,尤其是获知检测到的对象相对于基于波的传感器装置或者相对于其上布置有基于波的传感器装置的牵引车或挂车的实际定位和/或实际取向,
12、其中,至少一个检测到的对象是牵引车和/或挂车,或者是在周围环境中的与其连接的参与构成能摆动的连接的对象,例如牵引车侧的耦联元件和/或挂车侧的耦联元件。
13、为此,基于波的传感器装置例如可以是车辆中现有的驾驶员辅助系统的组成部分,例如倒车辅助系统的组成部分,从而无需为了通过获知定位信息对能摆动的连接进行可信度监控而在车辆中安装另外的传感器件。在此尤其设置的是,牵引车和/或挂车上的耦联元件并不强制地位于基于波的传感器装置的检测范围内,这是因为实际定位和/或实际取向可以通过几何上的观察例如根据牵引车或挂车的实际定位和/或实际取向来重建。因而一般可以设置的是,如果周围环境中的参与构成能摆动的连接的对象无法或无法完全被基于波的传感器装置检测到,则该对象的姿态信息可以根据与周围环境中的与之连接的检测到的对象相关的姿态信息推导出。因而,就不用在挂车耦联器的区域内明确设置可以完全辨别出挂车耦联器或所有耦联元件的基于波的传感器装置。
14、此外优选设置的是,获知定位信息还具有以下步骤:
15、-读取与检测到的对象相配属的目标定位和/或与检测到的对象相配属的目标取向,其中,目标定位和/或目标取向表明:在挂车耦联器的锁定状态下,分别配属的对象相对于基于波的传感器装置或者相对于其上布置有基于波的传感器装置的牵引车或挂车如何定位和/或取向;
16、-依赖于以下因素来获知定位信息,即
17、--分别检测到的对象的所获知的实际定位与该分别检测到的对象的目标定位相一致还是与其有偏差,和/或
18、--分别检测到的对象的所获知的实际取向与该分别检测到的对象的目标取向相一致还是与其有偏差,
19、其中,如果分别检测到的对象的所获知的实际定位与目标定位相一致和/或分别检测到的对象的所获知的实际取向与目标取向相一致,则定位信息优选表明:挂车耦联器可能处于锁定状态。因此有利地,发生了能简单执行的实际-目标比较,以便根据基于波的传感器装置的传感器信号或者根据对象的像来获知或推导出联接状态。
20、此外还可以设置的是,获知定位信息还具有以下步骤:
21、-依赖于以下因素来获知定位信息,即
22、--如果牵引车(或挂车)运动,检测到的对象的所获知的实际定位和/或所获知的实际取向和/或所获知的姿态信息是否发生变化以及在多大程度上发生变化,
23、和/或以相同的方式
24、--根据所获知的实际定位和/或所获知的实际取向和/或所获知的姿态信息是否得出在牵引车与挂车之间的相对运动,
25、其中,当牵引车运动时,如果检测到的对象的所获知的实际定位和/或所获知的实际取向和/或所获知的姿态信息没有发生变化,和/或牵引车与挂车之间不存在相对运动,则定位信息优选表明:挂车耦联器可能处于锁定状态。有利的是,因此也可以根据基于波的传感器装置的传感器信号得出牵引车是否仍会相对于挂车运动的结论,这可以被考虑用于验证联接信息,也就是说以便使该联接信息得到认可或不被认可。
26、此外,优选设置的是,根据检测到的对象的实际定位和/或实际取向和/或根据检测到的对象的姿态信息获知实际间距和/或实际角度,其中,实际间距表征牵引车侧的耦联元件与挂车侧的耦联元件的距离有多远,而实际角度表征牵引车侧的耦联元件相对于挂车侧的耦联元件如何取向。关于此也可以从几何上进行确认,锁定位置是否可能存在还是不存在,其中,为此例如补充性设置的是,如果实际间距已达到目标间距或超过该目标间距,则定位信息表明:挂车耦联器可能处于锁定状态。结合该间距因此已经可以获知,是否可能存在联接状态,其中,如已经提到的,各自的耦联元件为此并不强制地处于传感器装置的检测范围内,这是因为例如从几何上的观察,牵引车的后侧与挂车的前侧之间的实际间距也指明了两个耦联元件之间存在何种间距。因而总是也能重建相关的实际间距,以便估计联接状态。
27、优选地可以补充性设置的是,如果实际角度超过了边界角度,则定位信息表明:挂车耦联器并未处于锁定状态,其中,边界角度被选择成,使得在超过边界角度的情况下,挂车侧的耦联元件不再能与牵引车侧的耦联元件耦接。有利地,因此也可以查验,在给定的姿态信息的情况下联接是否完全可能。
28、此外,优选设置的是,如果根据挂车耦联器的锁定机构的运动和/或根据用于操纵锁定机构的电操纵机构的控制信号得出锁定机构处于锁闭位置中,则联接信息表明:挂车耦联器可能处于锁定状态。因而,可以以简单的方式从位于其中一个耦联元件上的联接传感器或锁定传感器推导出有关耦联状态的信息。
29、此外,优选可以设置的是,用于获知第一联接信息的牵引车急动度和/或挂车急动度经由
30、-牵引车和/或挂车上的速度传感器,和/或
31、-牵引车和/或挂车上的加速度传感器
32、来获知。这种速度传感器或加速度传感器例如可以是车轮转速传感器,优选是检测各自的车轮处的转速的主动式的车轮转速传感器,其中,可以根据转速推断出速度或加速度。然而,其他传感器也是能想到的。
33、因而,可以动用现有的传感器,以便推断出急动度,该急动度同样可以指明是否已经发生了耦接。通常,在耦联元件碰触时导致在牵引车或挂车处的速度或加速度的突然变化。因而优选设置的是,如果牵引车急动度和/或挂车急动度指明:挂车侧的耦联元件已碰触到牵引车侧的耦联元件,例如如果达到或超过针对各自的急动度所规定的急动度边界值,则联接信息指明:挂车耦联器可能处于锁定状态。
34、此外,优选设置的是,联接信息和定位信息依次或彼此并行地获知。因而,可以视应用而定灵活决定,以何种顺序来获知信息并进行评估。在此,可以优选设置的是,只有当联接信息表明挂车耦联器可能处于锁定状态时,才获知定位信息,或者反之亦然。有利的是,这可以通过如下方式来实现,即,首先仅针对其中一个可能性进行数据采集和评估,并随后才进行对数据的进一步评估以用于可信度查验或验证。
35、此外,优选设置的是,如果联接信息和定位信息都表明:挂车耦联器可能处于锁定状态,则补充性地还获知,牵引车急动度和/或挂车急动度是否达到或超过规定的急动度阈值,尤其是在牵引车发生运动后的时移之内,并且如果达到规定的急动度阈值,则该联接结果表明:牵引车与挂车之间构成了能摆动的连接。因而,即使在验证了耦联状态之后,也可以再次获知,在牵引车起步之后挂车是否由于耦联器中的游隙而有时移地被牵引带动。
36、根据本发明还涉及一种用于获知牵引车与挂车之间的挂车耦联器的联接状态的状态获知组件,状态获知组件至少具有:
37、-用于获知挂车耦联器的锁定机构的位置的位置传感器,和/或
38、-牵引车和/或挂车上的用于根据各自的加速度的时间导数获知牵引车急动度和/或挂车急动度的加速度传感器,和/或
39、-牵引车和/或挂车上的用于根据各自的速度的二阶时间导数获知牵引车急动度和/或挂车急动度的速度传感器,
40、-用于检测周围环境中的对象并且输出传感器信号的基于波的传感器装置,以及
41、-状态获知单元,其中,状态获知单元被构造成实施根据本发明的方法。
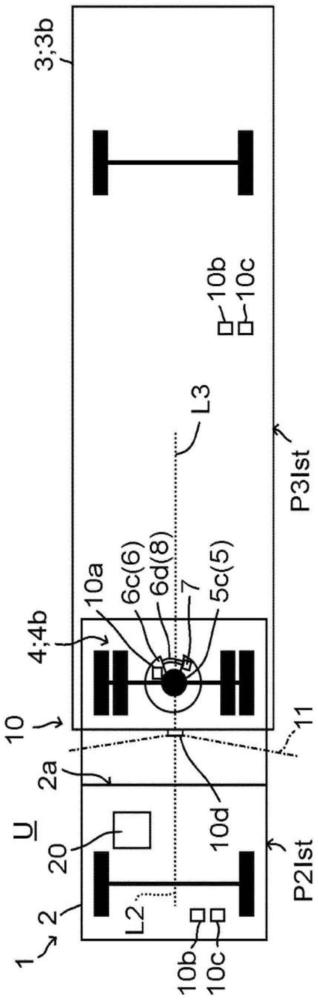
42、此外,根据本发明设置有一种车辆,尤其是商用车辆,该车辆优选可以自动运行,其由牵引车和挂车构成,其中,当挂车耦联器的锁定机构被带到锁闭位置中时,可以经由挂车耦联器在牵引车上的牵引车侧的耦联元件与挂车上的挂车侧的耦联元件之间构成能摆动的连接,其中,车辆还具有根据本发明的用于获知挂车耦联器的联接状态的状态获知组件。在此,挂车耦联器优选被实施为栓式耦联器,其中,作为挂车侧的耦联元件的牵引杆上的扣眼经由作为锁定机构的耦联栓可以保持在作为牵引车侧的耦联元件的牵引钩口内,以便构成能摆动的连接,或者
43、-被实施为鞍式耦联器,其中,作为挂车侧的耦联元件的鞍座主销经由作为锁定机构的耦联爪可以保持在作为牵引车侧的耦联元件的鞍板上,以便构成能摆动的连接。因而灵活应用于不同类型的耦联器。
本文地址:https://www.jishuxx.com/zhuanli/20240718/251083.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表