一种电气化公路智能化双极受电弓的制作方法
- 国知局
- 2024-08-02 16:47:02
本发明涉及一种电气化公路设备,尤其涉及一种电气化公路智能化双极受电弓。
背景技术:
1、重卡汽车作为公路货运长途运输的主力车型,存在运行里程长、油耗大、碳排放量高等问题,是我国交通运输行业节能减排的关键。当前技术条件下,电池技术无法支持长途重载运输、氢能源制取储存成本高,均不适用于长途重载运输。借鉴电气化铁路成熟的弓网受流技术,应用于公路运输,即电气化公路,是当前较为可行的方案。
2、受电弓是电气化公路重卡汽车受流的关键部件之一,安装在重卡汽车车顶,从车顶上方接触网取流,驱动车辆行驶,这种驱动方式实现了长途重载运输的“零排放”。轨道交通机车或动车组采用ac25kv牵引供电,车辆上方只需架设一根接触线,通过轮对与钢轨接触形成回路。重卡汽车由于对地绝缘,因此需采用直流供电,这要求接触线及受电弓都需要采用正负极的“双极”结构。这种“双极”受电弓较传统受电弓,从结构、导流方式、绝缘设计上均存在较大差别。
3、重卡汽车受运行环境、司机驾驶习惯等影响,车辆运行过程中不可能像轨道交通列车一样沿固定轨道行驶,其运行过程中极易产生横向偏移,若偏移过大会导致受电弓碳滑板离线,甚至钻网,影响车辆正常运行。
4、针对这种运行过程中产生的横向偏移,需通过一定的检测手段来感知及反馈,进而通过控制受电弓动作来进行反向补偿,保证受电弓与接触网的良好接触,避免发生受电弓离线或钻网。
5、有鉴于此,提出本发明。
技术实现思路
1、本发明的目的是提供一种电气化公路智能化双极受电弓,以解决现有技术中存在的上述技术问题。
2、本发明的目的是通过以下技术方案实现的:
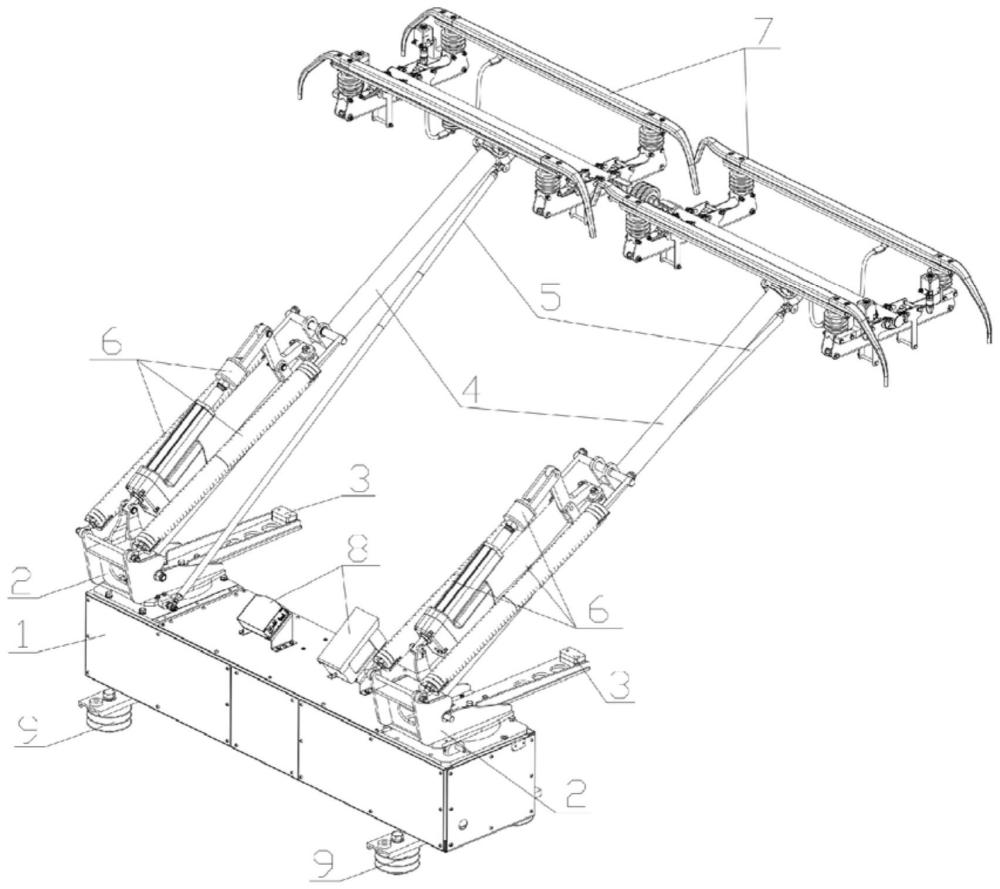
3、本发明的电气化公路智能化双极受电弓,所述受电弓包括:固定箱体1、弓臂安装座2、弓臂支撑3、弓臂4、平衡杆5、升降弓装置6、弓头7、监控系统8、安装绝缘子9;
4、所述固定箱体1底部通过安装绝缘子9与重卡汽车固定连接,顶部两侧与弓臂安装座2连接,箱体1为密封结构设计,内部有受电弓控制装置13、横向摆动驱动装14置;
5、所述弓臂安装座2通过铰点a固定在箱体1两侧,能绕底部的轴左右转动;
6、所述弓臂支撑3安装在弓臂安装座2上,用于落弓时支撑弓臂4,落弓位时,弓臂4与地面夹角为0°;
7、所述弓臂4末端通过铰点b固定在弓臂安装座2上,能绕安装座上下转动;顶端通过铰点c与弓头7连接,实现弓臂4上下动作、左右动作的多方向铰接;
8、铰点c为一种复合铰接结构,既能实现受电弓升降弓的铰接,又能实现受电弓左右摆动的铰接;
9、受电弓的横向摆动结构,由弓头7、两侧弓臂4及固定箱体1构成,为单边固定的平行四边形结构,这种结构保证受电弓在左右摆动时滑板始终是垂直车辆前进方向的;
10、弓臂支撑3、弓臂4、平衡杆5均在弓臂安装座2上,当受电弓横摆时,随安装座一起摆动;这样,升弓时能保持弓头7水平,落弓时亦能保证对弓臂4的支撑;
11、绝缘子22位于弓臂4中间部分,两侧通过法兰与弓臂4连接,作为受电弓绝缘防护的一部分;
12、所述平衡杆5通过铰点d固定在弓臂安装座2上,能绕安装座上下转动,与弓臂4平行设计,形成平行四边形结构,任意升弓高度下能保持弓头水平;
13、所述升降弓装置6位于弓臂4上方,由升弓弹簧21和电动推杆20组成,其中,升弓弹簧21两端通过铰点e和f分别与弓臂4、弓臂安装座2连接;
14、电动推杆20两端通过铰点g和h分别与弓臂安装座4、换向板19连接,换向板19与弓臂4通过铰点j连接;升弓时电动推杆20收缩,弹簧21拉动弓臂4实现升弓,降弓时电动推杆20伸长,克服弹簧21拉力实现降弓;
15、所述弓头7包括碳滑板25、弓头弹簧箱26、绝缘结构27,碳滑板25为左右双极设计,中间通过绝缘子隔离;
16、所述监控系统8包括监测装置和控制装置13,其中,监测装置由雷达36、高清相机37及接近开关28组成;
17、雷达36和高清相机37能实时监测受电弓碳滑板与接触线的相对位置,通过判断其位置关系下达受电弓横向摆动命令,保证碳滑板与接触线始终在设定的接触范围内;
18、当车辆短时横向偏移过大导致碳滑板与接触线瞬时脱开,此时接近开关28检测到接触线进行,触发降弓指令,受电弓降弓,避免发生钻网。
19、由上述本发明提供的电气化公路智能化双极受电弓,通过全新设计的受电弓结构和智能监控系统,实现了重卡汽车长途运输的电气化,降低了车辆离网风险,提高了弓网受流的连续性,具有结构简单,运行平稳可靠、智能化控制等特点。
技术特征:1.一种电气化公路智能化双极受电弓,其特征在于,所述受电弓包括:固定箱体(1)、弓臂安装座(2)、弓臂支撑(3)、弓臂(4)、平衡杆(5)、升降弓装置(6)、弓头(7)、监控系统(8)、安装绝缘子(9);
2.根据权利要求1所述的电气化公路智能双极受电弓,其特征在于,其升降弓过程包括:
3.根据权利要求2所述的电气化公路智能双极受电弓,其特征在于,当受电弓正负极滑板分别与接触线正负极接触后,电流通过受电弓上的柔性电缆从弓头沿弓臂流至固定箱体,进入车辆内部,除弓头(7)带电外,受电弓其它部分均不带电,弓头(7)通过中间的绝缘子将正负极进行隔离。
4.根据权利要求3所述的电气化公路智能双极受电弓,其特征在于,固定在受电弓箱体(1)上方的雷达(36)和高清相机(37)能实时监测弓网状态,并将受电弓与接触网的实时位置关系传递至受电弓控制装置(13),当车辆偏移量达到一定数值,控制装置(13)下达横向补偿指令,此时位于箱体内的横向驱动装置(14)动作,通过传动轴带动旋转支承(15)及弓臂安装座(2)一起转动,位于弓臂安装座(2)上方的弓臂2、弓臂支撑(3)、平衡杆(5)同步转动,弓头(7)在弓臂(4)的带动下亦会横向动作,从而保证碳滑板(25)与接触线在正常工作范围内,实现横向偏移的补偿,保证正常受流,此过程中碳滑板(25)始终是垂直于车辆前进方向的,间接保证了碳滑板(25)的有效工作范围。
5.根据权利要求4所述的电气化公路智能双极受电弓,其特征在于,当车辆偏移距离过大,导致网线脱离碳滑板(25),控制装置(13)接收到位于弓头两侧的接近开关(28)传递的信号,下达降弓指令,受电弓降弓,防止钻网。
6.根据权利要求5所述的电气化公路智能双极受电弓,其特征在于,当司机室下达降弓指令或因网线脱离而下达降弓指令,电动推杆(20)伸长,克服升弓弹簧(21)的拉力,电动推杆(20)的前端通过换向板(19)作用于弓臂(4),推动弓臂(4)下降,此时弓臂(4)、平衡杆(5)、升弓弹簧(21)及电动推杆(20)分别绕固定铰点b、d、g、f转动,弓头下降;
技术总结本发明公开了一种电气化公路智能化双极受电弓,包括固定箱体、弓臂安装座、弓臂支撑、弓臂、平衡杆、升降弓装置、弓头、监控系统、安装绝缘子等。该受电弓采用正负极的“双极”受流结构设计,通过从架设在公路上方的接触网取流,经受电弓上的柔性电缆将电流传递至车辆,驱动重卡汽车行驶。受电弓通过电动推杆和弹簧的配合实现升降弓。受电弓具备智能监控装置,能够实时监控弓网状态,并通过横向摆动补偿因车辆横向偏移产生的弓网位置偏差,弓头的接近开关可检测弓网离线,实现紧急降弓。该智能化双极受电弓结构简单,运行平稳可靠,智能化程度高,实现了重卡汽车长途运输的零排放。技术研发人员:赵志远,黄思俊,袁骞,郗汭,贾荣,吴玉启,张奇,吴楠受保护的技术使用者:北京中车赛德铁道电气科技有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/252475.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表