一种自动泊车的碰撞检测方法、系统、车辆、介质及程序与流程
- 国知局
- 2024-08-02 16:50:37
本发明涉及自动泊车碰撞检测,特别是涉及一种自动泊车的碰撞检测方法、系统、车辆、介质及程序。
背景技术:
1、车辆自动泊车系统是自动驾驶车辆辅助系统中倍受消费者青睐和常用的系统。目前的车辆自动泊车系统能完成多种场景的泊车,如窄车位、窄过道、墙角车位等,且绝大多数自动泊车系统的路径规划都是采用搜索型或几何型的规划算法。在这类算法中,车辆的碰撞检测模块不可避免的要对整个全局地图进行一个遍历,以确保车辆泊车过程中的安全性。传统的车辆避撞算法采用实时计算车辆外轮廓与周边障碍物的碰撞关系,在复杂的场景下,此方法计算时间长,占用cpu loading高,是影响规划和泊车效率的主要原因之一。
技术实现思路
1、本发明的目的在于,提出一种自动泊车的碰撞检测方法、系统、车辆、介质及程序,解决如何提高车辆碰撞检测精确度和效率的技术问题。
2、一方面,提供一种自动泊车的碰撞检测方法,包括:
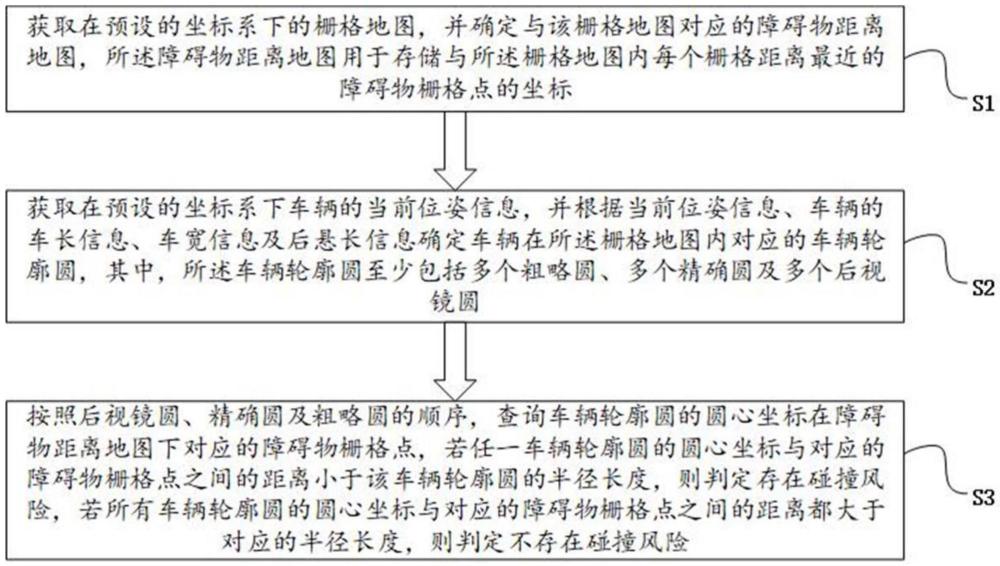
3、获取在预设的坐标系下的栅格地图,并确定与该栅格地图对应的障碍物距离地图,所述障碍物距离地图用于存储与所述栅格地图内每个栅格距离最近的障碍物栅格点的坐标;
4、获取在预设的坐标系下车辆的当前位姿信息,并根据当前位姿信息、车辆的车长信息、车宽信息及后悬长信息确定车辆在所述栅格地图内对应的车辆轮廓圆,其中,所述车辆轮廓圆至少包括多个粗略圆、多个精确圆及多个后视镜圆;
5、按照后视镜圆、精确圆及粗略圆的顺序,查询车辆轮廓圆的圆心坐标在障碍物距离地图下对应的障碍物栅格点,根据车辆轮廓圆的圆心坐标与对应的障碍物栅格点的距离判断是否存在碰撞风险。
6、另一方面,还提供一种自动泊车的碰撞检测系统,用以实现所述的自动泊车的碰撞检测方法,包括:
7、定位模块,用以获取在预设的坐标系下的栅格地图,并确定与该栅格地图对应的障碍物距离地图,所述障碍物距离地图用于存储与所述栅格地图内每个栅格距离最近的障碍物栅格点的坐标;
8、获取在预设的坐标系下车辆的当前位姿信息,并根据当前位姿信息、车辆的车长信息、车宽信息及后悬长信息确定车辆在所述栅格地图内对应的车辆轮廓圆,其中,所述车辆轮廓圆至少包括多个粗略圆、多个精确圆及多个后视镜圆;
9、碰撞检测模块,用以按照后视镜圆、精确圆及粗略圆的顺序,查询车辆轮廓圆的圆心坐标在障碍物距离地图下对应的障碍物栅格点,根据车辆轮廓圆的圆心坐标与对应的障碍物栅格点的距离判断是否存在碰撞风险。
10、另一方面,还提供一种车辆,包括:
11、一个或多个处理器;
12、存储器;
13、探测组件;
14、一个或多个计算机程序,其中所述一个或多个计算机程序被存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个计算机程序配置用于执行所述的自动泊车的碰撞检测方法。
15、另一方面,还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述自动泊车的碰撞检测方法的步骤。
16、另一方面,还提供一种自动泊车的碰撞检测的处理程序,其特征在于,使计算机执行下述处理:
17、获取在预设的坐标系下的栅格地图,并确定与该栅格地图对应的障碍物距离地图,所述障碍物距离地图用于存储与所述栅格地图内每个栅格距离最近的障碍物栅格点的坐标;
18、获取在预设的坐标系下车辆的当前位姿信息,并根据当前位姿信息、车辆的车长信息、车宽信息及后悬长信息确定车辆在所述栅格地图内对应的车辆轮廓圆,其中,所述车辆轮廓圆至少包括多个粗略圆、多个精确圆及多个后视镜圆;
19、按照后视镜圆、精确圆及粗略圆的顺序,查询车辆轮廓圆的圆心坐标在障碍物距离地图下对应的障碍物栅格点,根据车辆轮廓圆的圆心坐标与对应的障碍物栅格点的距离判断是否存在碰撞风险。
20、综上,实施本发明的实施例,具有如下的有益效果:
21、本发明提供的自动泊车的碰撞检测方法、系统、车辆、介质及程序,采用3粗略圆+12精确圆+2后视镜圆的方式代替车辆的车身轮廓,比传统的矩形车身更能精确的覆盖车辆在栅格地图中的几何;且判断最近障碍物距离时,只需要判断点与圆的几何关系,而非判断点与矩形的位置关系或者判断车辆角点向量之间的关系,大大的提升了车辆碰撞检测的效率。离线存储每个栅格点距离障碍物的最近距离,因此在一次规划过程中,不需要每时每刻都重新计算多个栅格点与车身的欧式距离,避免了多次开方运算,提升了碰撞检测的效率。除了车辆轮廓圆本身超出车辆真实轮廓一定距离外,再额外加上一个可变的安全距离参数,在提升窄车位泊车成功率的同时,也增加了库外泊车的安心感。
技术特征:1.一种自动泊车的碰撞检测方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述获取在预设的坐标系下的栅格地图,包括,
3.如权利要求2所述的方法,其特征在于,所述确定与该栅格地图对应的障碍物距离地图,包括,
4.如权利要求1所述的方法,其特征在于,所述根据当前位姿信息、车辆的车长信息、车宽信息及后悬长信息确定车辆在所述栅格地图内对应的车辆轮廓圆,包括,
5.如权利要求1所述的方法,其特征在于,所述根据车辆轮廓圆的圆心坐标与对应的障碍物栅格点的距离判断是否存在碰撞风险,包括:
6.如权利要求1所述的方法,其特征在于,所述按照后视镜圆、精确圆及粗略圆的顺序,查询车辆轮廓圆的圆心坐标在障碍物距离地图下对应的障碍物栅格点,根据车辆轮廓圆的圆心坐标与对应的障碍物栅格点的距离判断是否存在碰撞风险,包括,
7.如权利要求6所述的方法,其特征在于,还包括,
8.一种自动泊车的碰撞检测系统,用以实现如权利要求1-7任一项所述的方法,其特征在于,包括:
9.一种车辆,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
11.一种自动泊车的碰撞检测的处理程序,其特征在于,使计算机执行下述处理:
技术总结本发明提供一种自动泊车的碰撞检测方法、系统、车辆、介质及程序,包括,获取栅格地图和障碍物距离地图,障碍物距离地图用于存储与每个栅格距离最近的障碍物栅格点的坐标;根据当前位姿信息、车辆的车长信息、车宽信息及后悬长信息确定车辆在所述栅格地图内对应的车辆轮廓圆;若任一车辆轮廓圆的圆心坐标与对应的障碍物栅格点之间的距离小于该车辆轮廓圆的半径长度,则判定存在碰撞风险,若所有车辆轮廓圆的圆心坐标与对应的障碍物栅格点之间的距离都大于对应的半径长度,则判定不存在碰撞风险。本发明提升了车辆碰撞检测的效率,不需要每时每刻都重新计算多个栅格点与车身的欧式距离,避免了多次开方运算,提升了碰撞检测的效率。技术研发人员:胡云浩受保护的技术使用者:广州汽车集团股份有限公司技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240718/252692.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表