一种具有稳定轨道结构的巡检机器人
- 国知局
- 2024-08-05 13:32:46
本技术涉及巡检机器人,具体为一种具有稳定轨道结构的巡检机器人。
背景技术:
1、轨道巡检机器人是设计用于执行监测、检查和巡视任务的自主机器人系统。
2、轨道机器人被用于各种环境和行业,从工厂和仓库到建筑物和基础设施,甚至是在危险或难以接触的地区,但现有的轨道巡检机器人存在以下缺点:
3、(1)现有的巡检机器人在轨道上移动的稳定性不佳,容易产生左右晃动影响巡检任务;
4、(2)现有的巡检机器人两侧缺乏防撞缓冲结构,在轨道上移动时不慎与阻拦物碰撞会引起机器人的损坏。
技术实现思路
1、本实用新型的目的在于提供一种具有稳定轨道结构的巡检机器人,以解决上述背景技术中提出的现有的巡检机器人在轨道上移动的稳定性不佳,容易产生晃动影响巡检任务,巡检机器人两侧缺乏防撞缓冲结构,在轨道上移动时不慎与阻拦物碰撞会引起机器人的损坏的问题。
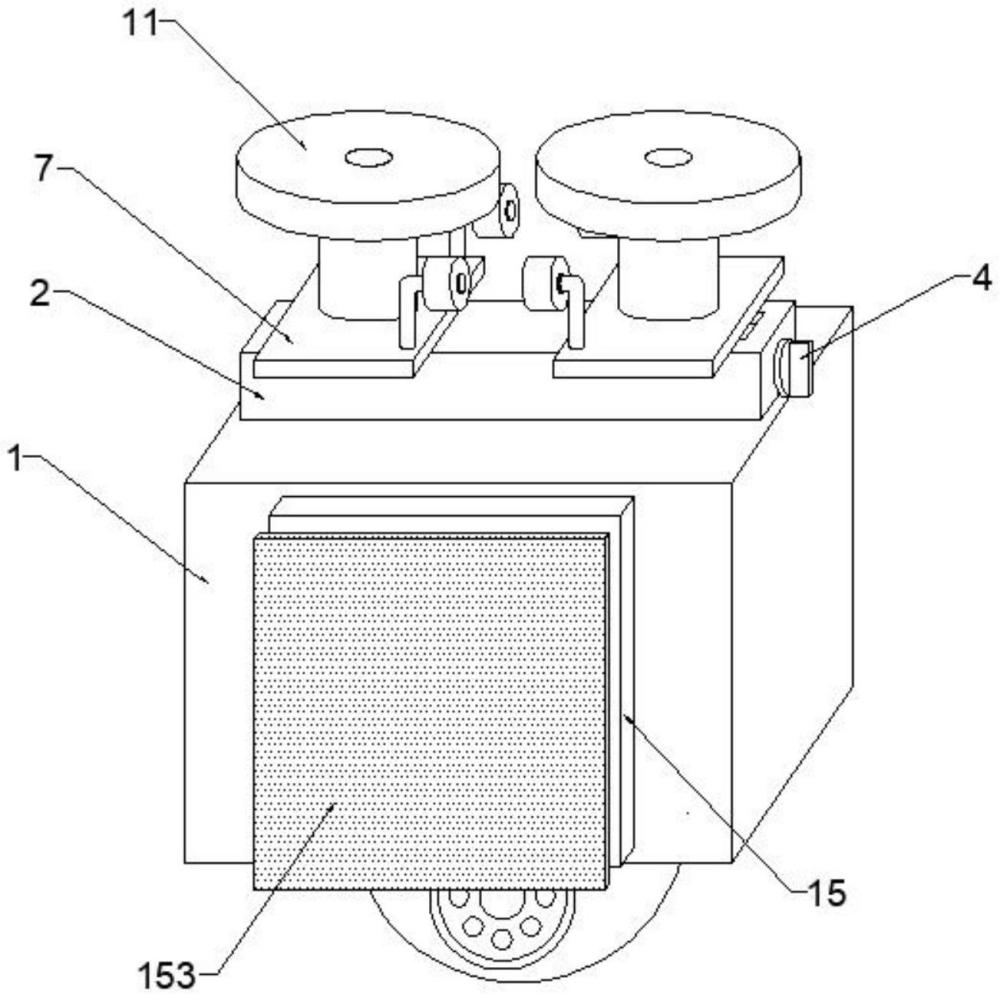
2、为实现上述目的,本实用新型提供如下技术方案:一种具有稳定轨道结构的巡检机器人,包括机器人本体和导轨,所述机器人本体的顶端固定连接有顶盒,所述顶盒内壁的两侧通过轴承转动连接有丝杠,所述丝杠表面的两侧均螺纹套接有位移件,所述位移件的顶端固定连接有支柱,所述支柱的顶端固定连接有安装板,所述安装板顶端的中部固定安装有固定架,所述固定架内壁的顶端固定安装有电机,所述电机的输出端固定连接有驱动轮,所述安装板顶端一侧的两端均固定连接有支杆,所述支杆的顶端转动连接有滚轮,且所述滚轮滑动连接于导轨内壁的底端,所述机器人本体的两侧均安装有缓冲机构。
3、使用本技术方案的一种具有稳定轨道结构的巡检机器人时,可调节两个驱动轮的间距与导轨充分贴触,巡检机器人移动更加稳定不易晃动,且侧边设置有缓冲结构,降低与阻拦物的碰撞损伤。
4、作为本实用新型的一种优选技术方案,所述缓冲机构包括安装座、阻尼器和护板,所述安装座固定连接于机器人本体的侧壁,所述安装座内壁的中部固定安装有阻尼器,所述阻尼器的一端固定连接有护板。设置的护板和阻尼器可以起到缓冲保护作用。
5、作为本实用新型的一种优选技术方案,所述阻尼器的四个边侧均固定连接有滑杆,且四个所述滑杆的一端分别与安装座内壁的四个边侧固定连接,所述滑杆表面的一侧套设有滑套,所述滑杆表面的一端套设有弹簧一,所述滑套的表面转动连接有连杆,且所述连杆的一端与护板转动连接。设置的弹簧一能进一步提高缓冲性能。
6、作为本实用新型的一种优选技术方案,所述弹簧一的一端与滑套固定连接,所述弹簧一的另一端与安装座的内壁固定连接。将弹簧一的两端固定可防止其从滑杆上脱落。
7、作为本实用新型的一种优选技术方案,所述安装座背离机器人本体一侧的四角均开设有导向槽,四个所述导向槽的内壁均滑动连接有导向杆,且四个所述导向杆的一端与护板固定连接,所述导向槽的内部放置有弹簧二。设置的导向杆可避免护板的移动出现歪移。
8、作为本实用新型的一种优选技术方案,所述丝杠的一端穿过顶盒的外壁固定连接有旋钮。设置旋钮便于对丝杠进行转动。
9、作为本实用新型的一种优选技术方案,所述顶盒顶端的两侧均开设有位移口,且所述支柱滑动连接于位移口的内壁。位移口为支柱的移动提供了空间。
10、作为本实用新型的一种优选技术方案,所述丝杠表面两侧的螺纹方向相反。丝杠表面两侧的位移件能呈反向移动。
11、与现有技术相比,本实用新型的有益效果是:
12、1、该巡检机器人通过设置的滚轮能够在导轨上滑行,通过转动旋钮可带动两个驱动轮移动调节间距,与导轨充分贴触,提高巡检机器人安装的稳定性,移动时不容易出现左右晃动的情况;
13、2、在巡检机器人本体两侧设置有缓冲机构,当其移动过程中不慎与阻拦物发生碰撞后,护板会对阻尼器造成挤压,以及通过连杆对弹簧一造成挤压,进而对冲击力起到缓冲的作用,降低对巡检机器人本体的损伤。
技术特征:1.一种具有稳定轨道结构的巡检机器人,包括机器人本体(1)和导轨(14),其特征在于:所述机器人本体(1)的顶端固定连接有顶盒(2),所述顶盒(2)内壁的两侧通过轴承转动连接有丝杠(3),所述丝杠(3)表面的两侧均螺纹套接有位移件(5),所述位移件(5)的顶端固定连接有支柱(6),所述支柱(6)的顶端固定连接有安装板(7),所述安装板(7)顶端的中部固定安装有固定架(9),所述固定架(9)内壁的顶端固定安装有电机(10),所述电机(10)的输出端固定连接有驱动轮(11),所述安装板(7)顶端一侧的两端均固定连接有支杆(12),所述支杆(12)的顶端转动连接有滚轮(13),且所述滚轮(13)滑动连接于导轨(14)内壁的底端,所述机器人本体(1)的两侧均安装有缓冲机构(15)。
2.根据权利要求1所述的一种具有稳定轨道结构的巡检机器人,其特征在于:所述缓冲机构(15)包括安装座(151)、阻尼器(152)和护板(153),所述安装座(151)固定连接于机器人本体(1)的侧壁,所述安装座(151)内壁的中部固定安装有阻尼器(152),所述阻尼器(152)的一端固定连接有护板(153)。
3.根据权利要求2所述的一种具有稳定轨道结构的巡检机器人,其特征在于:所述阻尼器(152)的四个边侧均固定连接有滑杆(16),且四个所述滑杆(16)的一端分别与安装座(151)内壁的四个边侧固定连接,所述滑杆(16)表面的一侧套设有滑套(17),所述滑杆(16)表面的一端套设有弹簧一(18),所述滑套(17)的表面转动连接有连杆(19),且所述连杆(19)的一端与护板(153)转动连接。
4.根据权利要求3所述的一种具有稳定轨道结构的巡检机器人,其特征在于:所述弹簧一(18)的一端与滑套(17)固定连接,所述弹簧一(18)的另一端与安装座(151)的内壁固定连接。
5.根据权利要求2所述的一种具有稳定轨道结构的巡检机器人,其特征在于:所述安装座(151)背离机器人本体(1)一侧的四角均开设有导向槽(20),四个所述导向槽(20)的内壁均滑动连接有导向杆(21),且四个所述导向杆(21)的一端与护板(153)固定连接,所述导向槽(20)的内部放置有弹簧二(22)。
6.根据权利要求1所述的一种具有稳定轨道结构的巡检机器人,其特征在于:所述丝杠(3)的一端穿过顶盒(2)的外壁固定连接有旋钮(4)。
7.根据权利要求1所述的一种具有稳定轨道结构的巡检机器人,其特征在于:所述顶盒(2)顶端的两侧均开设有位移口(8),且所述支柱(6)滑动连接于位移口(8)的内壁。
8.根据权利要求1所述的一种具有稳定轨道结构的巡检机器人,其特征在于:所述丝杠(3)表面两侧的螺纹方向相反。
技术总结本技术公开了一种具有稳定轨道结构的巡检机器人,包括机器人本体和导轨,机器人本体的顶端固定连接有顶盒,顶盒内壁的两侧通过轴承转动连接有丝杠,丝杠表面的两侧均螺纹套接有位移件,位移件的顶端固定连接有支柱,支柱的顶端固定连接有安装板,安装板顶端的中部固定安装有固定架,固定架内壁的顶端固定安装有电机,电机的输出端固定连接有驱动轮,安装板顶端一侧的两端均固定连接有支杆,支杆的顶端转动连接有滚轮,本技术一种具有稳定轨道结构的巡检机器人,可调节两个驱动轮的间距与导轨充分贴触,巡检机器人移动更加稳定不易晃动,且侧边设置有缓冲结构,降低与阻拦物的碰撞损伤。技术研发人员:崔继峰,杨英杰,张明龙,玄贞军,王乐东受保护的技术使用者:山东科技大学技术研发日:20231212技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240720/267986.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表