一种偏航角速率对空中最小操纵速度影响修正方法与流程
- 国知局
- 2024-08-01 05:23:27
本申请属于飞机飞行力学设计领域,特别涉及一种偏航角速率对空中最小操纵速度影响修正方法。
背景技术:
1、空中最小操纵速度是飞机边界飞行力学设计中的核心指标,该指标是对飞机在一种特定的飞行状态(发动机单发失效、方向舵满偏、固定航向)下维持航向可控的最低安全速度。考虑到空中最小操纵速度试飞中稳态航向很难维持,飞机实时会出现轻微左偏或者右偏,诱发随机偏航角速率,导致静态空中最小操纵速度出现偏差。如果偏差量较大,可能会导致航向发散的情况,引起飞机航向失控。为保证飞机单发失效状态下的飞行安全性,准确确定空中最小操纵速度甚为重要,而当前又缺少一种能够快速、合理、简易的表述、表征以及分析偏航角速率对空中最小操纵速度的影响修正的方法。
技术实现思路
1、本申请的目的是提供了一种偏航角速率对空中最小操纵速度影响修正方法,以解决现有技术中飞机空中最小操纵速度计算复杂、计算精度差的问题。
2、本申请的技术方案是:一种偏航角速率对空中最小操纵速度影响修正方法,包括:
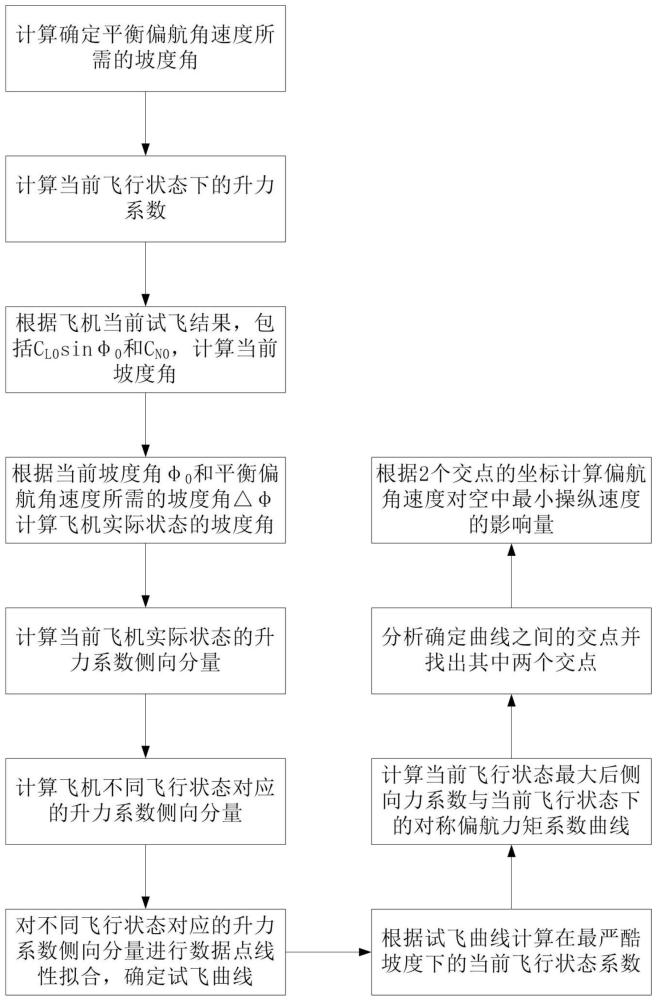
3、已知当前飞行状态,计算确定平衡偏航角速度所需的坡度角△φ;
4、获取当前飞行压力计算当前飞行状态下的升力系数cl0;
5、进行飞机试飞,根据飞机当前试飞结果,包括cl0sinφ0和cn0,计算当前坡度角φ0;
6、根据当前坡度角φ0和平衡偏航角速度所需的坡度角△φ计算飞机实际状态的坡度角φ=φ0+△φ;
7、确定飞行实际状态的侧向分量与飞机实际状态的升力系数之间的关系式,并计算当前飞机实际状态的升力系数侧向分量cy=cl0sinφ;
8、根据飞行实际状态的侧向分量与飞机实际状态的坡度角之间的关系式计算飞机不同飞行状态对应的升力系数侧向分量;
9、对不同飞行状态对应的升力系数侧向分量进行数据点线性拟合,确定试飞状态下后侧向力系数与飞机试飞得到的对称偏航力矩系数曲线cl0sinφ0~cn0和当前飞行状态下后侧向力系数与飞机试飞得到的对称偏航力矩系数曲线cl0sinφ~cn0;
10、根据cl0sinφ0~cn0曲线和cl0sinφ~cn0曲线计算标准大气条件、0高度和不同飞行速度下在最严酷坡度下的当前飞行状态最大后侧向力系数cl*sin|φ|max和当前飞行状态下的对称偏航力矩系数cn;
11、根据cl*sin|φ|max和不同状态下的cn之间的对应关系得到当前飞行状态最大后侧向力系数与当前飞行状态下的对称偏航力矩系数曲线cl*sin|φ|max~cn;
12、分析确定cl0sinφ0~cn0曲线、cl0sinφ~cn0曲线和cl*sin|φ|max~cn曲线之间的交点并找出其中两个交点,其中一个基于试验曲线得到的交点a0(x0,y0),另一个交点a1(x1,y1)基于修正曲线得到;
13、根据2个交点的坐标计算偏航角速度对空中最小操纵速度的影响量△v。
14、优选地,所述平衡偏航角速度所需的坡度角△φ的计算公式为:
15、g=9.8*63567662/(6356766+h)2
16、△φ=-v/3.6*△r/g
17、式中,g为重力加速度,h为飞行高度,v为飞行速度,△r为偏航角速率。
18、优选地,所述当前飞行状态下的升力系数cl0的计算公式为:
19、ρ=p/(287.05*(288.15-0.0065*h))
20、cl0=2*g*g/(ρ*v2/3.62*s)
21、式中,ρ为大气密度,p为大气压力,g为飞机重量,h为飞行高度,g为重力加速度,v为飞行速度,s为机翼面积。
22、优选地,所述当前坡度角φ0的计算公式为:
23、sn=cl0sinφ0/cl0
24、φ0=asin(sn)
25、式中,a为常量,sn为坡度角正弦值。
26、优选地,所述当前飞行状态下的对称偏航力矩系数cn的计算公式为:
27、cn=△t*le/(0.5*ρ*v2)/s/ba
28、式中,s为机翼面积,ba为机翼展长,ρ为大气密度,v为飞行速度,△t为发动机不对称推力,le为发动机中心线距机身对称面的侧向距离。
29、优选地,所述两个交点坐标的确定公式为:
30、x0=(clsinφ)0
31、x1=(clsinφ)1
32、y0=(cn)0
33、y1=(cn)1
34、式中,括号外部的下标分别代表该交点对应状态下的飞行状态下后侧向力系数值和飞机试飞得到的对称偏航力矩系数值。
35、优选地,所述偏航角速度对空中最小操纵速度的影响量△v的计算公式为:
36、
37、式中,ρ为大气密度,g为飞机重量,g为重力加速度,s为机翼面积。
38、本申请的偏航角速率对空中最小操纵速度影响修正方法,先根据平衡偏航角速度所需要的坡度角和试飞当前坡度角反推出飞机实际状态的坡度角,而后通过飞机不同飞行状态对应的升力系数侧向分量,对新的坡度角进行数据点线性拟合,从而修正试验曲线,最后通过修正试验曲线反求出给定飞行状态下的空中最小操纵速度,最后比较修正得到的空中最小操纵速度和试验空中最小操纵速度,得到两者的差量,该方法分析明晰简单、使用简单;同时为飞机最小安全起飞速度的确定提供了准确、有效、简单的分析手段,为保障发动机失效状态安全飞行提供理论支持和技术保障。
技术特征:1.一种偏航角速率对空中最小操纵速度影响修正方法,其特征在于,包括:
2.如权利要求1所述的偏航角速率对空中最小操纵速度影响修正方法,其特征在于,所述平衡偏航角速度所需的坡度角△φ的计算公式为:
3.如权利要求1所述的偏航角速率对空中最小操纵速度影响修正方法,其特征在于,所述当前飞行状态下的升力系数cl0的计算公式为:
4.如权利要求1所述的偏航角速率对空中最小操纵速度影响修正方法,其特征在于,所述当前坡度角φ0的计算公式为:
5.如权利要求1所述的偏航角速率对空中最小操纵速度影响修正方法,其特征在于,所述当前飞行状态下的对称偏航力矩系数cn的计算公式为:
6.如权利要求1所述的偏航角速率对空中最小操纵速度影响修正方法,其特征在于,所述两个交点坐标的确定公式为:
7.如权利要求1所述的偏航角速率对空中最小操纵速度影响修正方法,其特征在于,所述偏航角速度对空中最小操纵速度的影响量△v的计算公式为:
技术总结本申请属于飞机飞行力学设计领域,为一种偏航角速率对空中最小操纵速度影响修正方法,先根据平衡偏航角速度所需要的坡度角和试飞当前坡度角反推出飞机实际状态的坡度角,而后通过飞机不同飞行状态对应的升力系数侧向分量,对新的坡度角进行数据点线性拟合,从而修正试验曲线,最后通过修正试验曲线反求出给定飞行状态下的空中最小操纵速度,最后比较修正得到的空中最小操纵速度和试验空中最小操纵速度,得到两者的差量,该方法分析明晰简单、使用简单;同时为飞机最小安全起飞速度的确定提供了准确、有效、简单的分析手段,为保障发动机失效状态安全飞行提供理论支持和技术保障。技术研发人员:武虎子,申晓明,李伟,高波,范天伦受保护的技术使用者:中国航空工业集团公司西安飞机设计研究所技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/219486.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表