一种空间柱状物体捕获转运装置
- 国知局
- 2024-08-01 05:24:16
本发明属于自动化设备领域,具体涉及一种空间柱状物体捕获转运装置。
背景技术:
1、自动化捕获转运物体需要考虑工作环境与待捕获物体的姿态,因人工不能很好适应各类工作环境及存在安全风险,因此在工序中间的物料转向或移动等用到了抓取转运装置。
2、而现在的抓取转运装置多为功能单一的固定夹持,在物体保持一定运动状态的情况下,无法在捕获后调整物体的姿态和位置。
技术实现思路
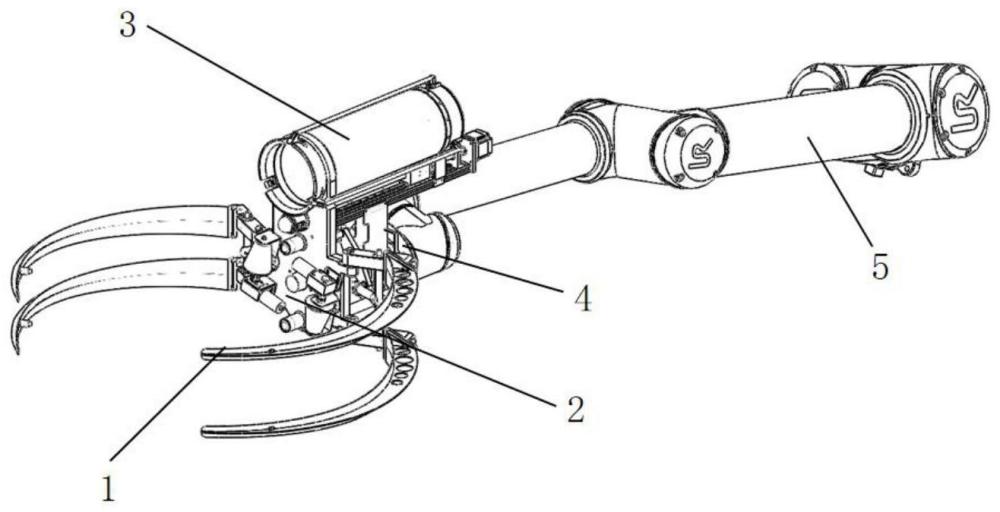
1、本发明是一种空间柱状物体捕获转运装置。用于空中捕获柱状物体。该装置具有捕获、螺旋滑滚、定位及物品转运功能。
2、针对上述技术问题,本发明第一方面涉及一种空间柱状物体捕获转运装置包括:
3、环抱式捕获组件1,所述环抱式捕获组件包括若干捕获抱取臂15;
4、滑滚组件2,所述滑滚组件2与所述环抱式捕获组件1连接,滑滚组件2包括若干可与空间柱状物体相对滑滚并辅助空间柱状物体定位的滑滚部件。
5、进一步地,所述滑滚组件2包括若干可与柱状物体相对滑动的柱状飞行器摩擦轮23,所述摩擦轮旋转轴线与飞行器轴线有5°~30°偏差;第一所述柱状飞行器摩擦轮23轴线与第二柱状飞行器摩擦轮23轴线平行。
6、优选地,所述摩擦轮旋转轴线与飞行器轴线偏差为10°。
7、进一步地,所述柱状飞行器摩擦轮23包括:柱状摩擦轮231、驱动柱状摩擦轮231转动的柱状摩擦轮驱动电机232;
8、所述柱状摩擦轮231与所述柱状摩擦轮驱动电机232连接,所述柱状摩擦轮231可绕所述所述柱状摩擦轮驱动电机232旋转轴旋转,柱状摩擦轮231的底面大于顶面;
9、所述第一柱状摩擦轮底面对应第二柱状摩擦轮顶面,所述第一柱状摩擦轮顶面对应第二柱状摩擦轮底面。
10、进一步地,所述滑滚组件2还包括:可与柱状物体接触的定位弹簧销22、辅助滑滚部件24;
11、所述定位弹簧销22包括弹簧销销头221,弹簧222和弹簧销销筒223,所述弹簧销销头221套接在弹簧销销筒223上,所述弹簧222第一端与弹簧销销头连接,第二端与弹簧销销筒223底部固定连接。
12、进一步地,所述环抱式捕获组件1还包括驱动捕获抱取臂15的若干活动杆。
13、进一步地,所述环抱式捕获组件1还包括:捕获驱动杆11、球头空间连杆12、捕获转动杆13、捕获主架摆动杆14。
14、所述驱动杆11一端与球头空间连杆12第一端活动连接;
15、所述球头空间连杆12包括带有空槽的球头,第二端与通过球头与所述捕获转动杆13杆体活动连接;
16、所述捕获转动杆13一端与捕获主架摆动杆14杆体活动连接;
17、所述捕获主架摆动杆14与所述捕获抱取臂15固定连接;
18、所述捕获抱取臂15上安装有可与柱状物体相对滑动的捕获辅助轮16。
19、进一步地,所述环抱式捕获组件1还包括:驱动电机10,所述驱动电机10与捕获驱动杆11杆体固定连接,所述捕获驱动杆11围绕所述驱动电机10驱动轴旋转,驱动所述捕获抱取臂15。
20、可选地,所述的空间柱状物体捕获转运装置,还包括物品转运组件3,所述物品转运组件3包括物品转运舱31、舱门滑动架32、滑动架导轮组33;
21、所述物品转运舱31为空心几何体,其设置有连通转运舱31内外的转运滑槽311,所述滑槽311沿物品转运舱31开口方向设置;
22、所述滑动架32两侧与所述物品转运舱31固定连接;所述滑动架导轮组33安装在所述滑动架32一端;
23、所述滑动架32包括滑动挡板322,所述滑动挡板322设置在所述物品转运舱31内,可沿所述所述滑槽311前后滑动。
24、可选地,所述的空间柱状物体捕获转运装置,还包括法兰件4和多自由度机械臂5,所述多自由度机械臂5通过法兰件4与环抱式捕获组件1、滑滚组件2固定连接。
25、本发明第二方面提供了一种空间柱状物体捕获转运装置的应用,所述空间柱状物体捕获转运装置用于捕获空间柱状物体,并转运该空间柱状物体和其中的待转运物。
26、本发明的有益效果在于:空间柱状物体捕获转运装置捕获后调整柱状被捕获物周向与轴向双向定位。
技术特征:1.一种空间柱状物体捕获转运装置,其特征在于,包括:
2.根据权利要求1所述的空间柱状物体捕获转运装置,其特征在于,所述滑滚组件(2)包括若干可与柱状物体相对滑动的柱状飞行器摩擦轮(23),所述摩擦轮旋转轴线与飞行器轴线有5°~30°偏差;第一所述柱状飞行器摩擦轮(23)轴线与第二柱状飞行器摩擦轮(23)轴线平行。
3.根据权利要求2所述的空间柱状物体捕获转运装置,其特征在于,所述柱状飞行器摩擦轮(23)包括:柱状摩擦轮(231)、驱动柱状摩擦轮(231)转动的柱状摩擦轮驱动电机(232);
4.根据权利要求1所述的空间柱状物体捕获转运装置,其特征在于,所述滑滚组件(2)还包括:可与柱状物体接触的定位弹簧销(22)、辅助滑滚部件(24);
5.根据权利要求1所述的空间柱状物体捕获转运装置,其特征在于,所述环抱式捕获组件(1)还包括驱动捕获抱取臂(15)的若干活动杆。
6.根据权利要求1或5所述的空间柱状物体捕获转运装置,其特征在于,所述环抱式捕获组件(1)还包括:捕获驱动杆(11)、球头空间连杆(12)、捕获转动杆(13)、捕获主架摆动杆(14);
7.根据权利要求6所述的空间柱状物体捕获转运装置,其特征在于,所述环抱式捕获组件(1)还包括:驱动电机(10),所述驱动电机(10)与捕获驱动杆(11)杆体固定连接,所述捕获驱动杆(11)围绕所述驱动电机(10)驱动轴旋转,驱动所述捕获抱取臂(15)。
8.根据权利要求1所述的空间柱状物体捕获转运装置,其特征在于,还包括物品转运组件(3),所述物品转运组件(3)包括物品转运舱(31)、舱门滑动架(32)、滑动架导轮组(33);
9.根据权利要求1所述的空间柱状物体捕获转运装置,其特征在于,还包括法兰件(4)和多自由度机械臂(5),所述多自由度机械臂(5)通过法兰件(4)与环抱式捕获组件(1)、滑滚组件(2)固定连接。
10.一种根据权利要求1—9所述的空间柱状物体捕获转运装置的应用,所述空间柱状物体捕获转运装置用于捕获空间柱状物体,并转运该空间柱状物体和其中的待转运物。
技术总结本发明涉及一种空间柱状物体捕获转运装置,包括:环抱式捕获组件1,所述环抱式捕获组件1包括若干捕获抱取臂15;滑滚组件2,所述滑滚组件2与所述环抱式捕获组件1连接,滑滚组件2包括若干可与空间柱状物体相对滑滚并辅助空间柱状物体定位的滑滚部件。空间柱状物体捕获转运装置中环抱式捕获组件1通过回拢的方式将柱状飞行器初步捕获,柱状飞行器捕获后通过滑滚组件2调整柱状飞行器周向与轴向双向定位。技术研发人员:李锐明,姜水清,周志荣,张文明,张璠,张宪宏,金晟毅,程刚,田健,姚燕安受保护的技术使用者:北京交通大学技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/219562.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表