一种微重力环境实验的反馈控制系统的制作方法
- 国知局
- 2024-08-01 05:26:12
本发明涉及微重力环境实验,特别是涉及一种微重力环境实验的反馈控制系统。
背景技术:
1、随着航天事业的发展,太空中的微重力效应逐渐引起了科研人员的重视。生物、材料等物质在微重力环境下会显现出在重力环境中所不具备的一些独特特性,从而带动了相关领域的科技发展,其中生物学的微重力学效应更是微重力学研究的热点之一,利用空间微重力的环境特点,可制作出理想球状产品、溶菌酶等。但由于航天环境复杂、费用高昂,令许多实验无法开展,因此开展微重力环境模拟实验存在重要意义。
2、在微重力环境模拟的仪器中,双轴回转器以及随机定位仪具有占用面积小、操作简单、性能稳定、可大批量进行细胞培养的优势,但上述设备的实验过程中也出现诸多问题,例如设备的运转参数设置往往依赖于过往经验,并且无法在实验过程中进行调节,导致重力环境无法同时满足不同种类的生物细胞,对实验结果造成偏差。
3、因此,亟需一种微重力环境实验的反馈控制系统。
技术实现思路
1、本发明的目的是提供一种微重力环境实验的反馈控制系统,能够通过实验反馈,快速判断并调节实际装置参数,或引入外力补偿调整微重力环境,能够增加模拟持续工作时间,实现对微重力自适应变化。
2、为实现上述目的,本发明提供了如下方案:
3、一种微重力环境实验的反馈控制系统,包括:
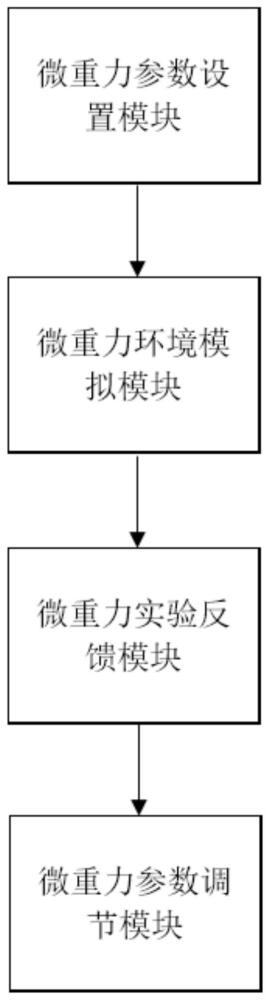
4、微重力参数设置模块、微重力环境模拟模块、微重力实验反馈模块、微重力参数调节模块;
5、所述微重力参数设置模块,用于为微重力模拟装置设置模拟参数,并将所述模拟参数发送至所述微重力环境模拟模块;
6、所述微重力环境模拟模块,用于基于所述模拟参数启动所述微重力模拟装置,生成微重力环境;
7、所述微重力实验反馈模块,用于将实验样本置入所述微重力环境中,并采集所述实验样本的运动状态,将所述运动状态发送至所述微重力参数调节模块;
8、所述微重力参数调节模块,用于分析所述实验样本的运动状态与预设理想运动状态的差距,获取运动状态差值,并根据所述运动状态差值调节所述模拟参数。
9、进一步地,所述微重力参数设置模块包括:微重力模拟装置构建单元,微重力参数设置单元;
10、所述微重力模拟装置构建单元,用于构建微重力模拟装置;
11、所述微重力参数设置单元,用于为所述微重力模拟装置设置模拟参数。
12、进一步地,为所述微重力模拟装置设置模拟参数包括:
13、分析所述微重力模拟装置的结构,获取所述微重力模拟装置中每个结构的标准运行参数;
14、将所述标准运行参数与对应的结构打包处理,构建模拟参数数据库;
15、基于所述模拟参数数据库进行查找,获取所需的模拟参数。
16、进一步地,所述微重力环境模拟模块包括:模拟参数输入单元、微重力环境模拟单元;
17、所述模拟参数输入单元,用于将所述模拟参数输入所述微重力模拟装置中,生成第一控制指令;
18、微重力环境模拟单元,用于基于所述第一控制指令启动所述微重力模拟装置,生成微重力环境。
19、进一步地,所述微重力实验反馈模块包括:微重力实验单元、微重力实验反馈单元;
20、所述微重力实验单元,用于确定实验样本,并将所述实验样本置入所述微重力环境中进行实验;
21、所述微重力实验反馈单元,用于采集所述微重力环境下实验样本的运动状态,以及实验中的微重力环境参数和装置实际参数。
22、进一步地,所述微重力参数调节模块包括:样本状态判断单元、实际参数分析单元、微重力参数调节单元;
23、所述样本状态判断单元,用于判断所述实验样本的运动状态与预设理想运动状态的差距,获取运动状态差值;
24、所述实际参数分析单元,用于根据所述微重力环境参数和运动状态差值,分析所述装置实际参数需调节情况,生成第二控制指令;
25、所述微重力参数调节单元,用于基于所述第二控制指令调节所述装置实际参数,生成新的微重力环境。
26、进一步地,判断所述实验样本的运动状态与预设理想运动状态的差距,获取所述运动状态差值包括:
27、基于所述实验样本的运动状态获取实际驱动力;
28、基于预设的所述理想运动状态获取理想驱动力;
29、采集所述实验样本在运动过程中受到的摩擦力以及外部引力,基于所述实际驱动力、摩擦力、外部引力的总和计算与所述理想驱动力的受力差值,即为所述运动状态差值。
30、进一步地,所述微重力参数调节模块还包括外力补偿单元,当所述运动状态差值在预设阈值内,则进行分析生成第二控制指令,并基于所述第二控制指令调节所述装置实际参数,生成所述新的微重力环境;若所述运动状态差值超出预设阈值时,则基于所述外力补偿单元对所述微重力模拟装置启动外力补偿。
31、本发明的有益效果为:
32、本发明提供了一种微重力环境实验的反馈控制系统,通过对微重力模拟装置中的参数进行设置,增加了模拟持续工作时间,且可以实现对微重力自适应变化;通过采集微重力环境下实验样本的运动状态、微重力环境参数和装置实际参数,进行判断并调节实际装置参数,或引入外力补偿,能够快速校准微重力环境;本发明简单易实现,通过调整设备参数后重复实验的成本低,同时实验操作不受时间控制,实验设备的外形尺寸和重量也不受限制,有利于微重力的实验操作。
技术特征:1.一种微重力环境实验的反馈控制系统,其特征在于,包括:微重力参数设置模块、微重力环境模拟模块、微重力实验反馈模块、微重力参数调节模块;
2.根据权利要求1所述的微重力环境实验的反馈控制系统,其特征在于,所述微重力参数设置模块包括:微重力模拟装置构建单元,微重力参数设置单元;
3.根据权利要求2所述的微重力环境实验的反馈控制系统,其特征在于,为所述微重力模拟装置设置模拟参数包括:
4.根据权利要求1所述的微重力环境实验的反馈控制系统,其特征在于,所述微重力环境模拟模块包括:模拟参数输入单元、微重力环境模拟单元;
5.根据权利要求1所述的微重力环境实验的反馈控制系统,其特征在于,所述微重力实验反馈模块包括:微重力实验单元、微重力实验反馈单元;
6.根据权利要求5所述的微重力环境实验的反馈控制系统,其特征在于,所述微重力参数调节模块包括:样本状态判断单元、实际参数分析单元、微重力参数调节单元;
7.根据权利要求6所述的微重力环境实验的反馈控制系统,其特征在于,判断所述实验样本的运动状态与预设理想运动状态的差距,获取所述运动状态差值包括:
8.根据权利要求6所述的微重力环境实验的反馈控制系统,其特征在于,所述微重力参数调节模块还包括外力补偿单元,当所述运动状态差值在预设阈值内,则进行分析生成第二控制指令,并基于所述第二控制指令调节所述装置实际参数,生成所述新的微重力环境;若所述运动状态差值超出预设阈值时,则基于所述外力补偿单元对所述微重力模拟装置启动外力补偿。
技术总结本发明涉及微重力环境实验技术领域,特别是涉及一种微重力环境实验的反馈控制系统,包括:微重力参数设置模块,用于为微重力模拟装置设置模拟参数,并将所述模拟参数发送至所述微重力环境模拟模块;微重力环境模拟模块,用于基于所述模拟参数启动所述微重力模拟装置,生成微重力环境;微重力实验反馈模块,用于将实验样本置入所述微重力环境中,并采集所述实验样本的运动状态,将所述运动状态发送至所述微重力参数调节模块;微重力参数调节模块,用于分析所述实验样本的运动状态与预设理想运动状态的差距,获取运动状态差值,并根据所述运动状态差值调节所述模拟参数。本发明能够增加模拟持续工作时间,实现对微重力自适应变化。技术研发人员:邢希学,张京军,奚晓鹏,龚长华受保护的技术使用者:北京戴纳实验科技有限公司技术研发日:技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/219741.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表