一种带臂无人机及其控制方法
- 国知局
- 2024-08-01 05:27:24
本发明涉及飞行机器人,具体为一种带臂无人机及其控制方法。
背景技术:
1、随着无人机技术的快速发展和普及,无人机在生产生活中的应用越来越广泛,诸如高空采摘、空中运输、电力系统检修、高空清洁等,无人机技术为许多高空作业场景带来了便利,提高了空中作业的安全性,同时也降低了作业成本,带来了巨大的经济效益。于是许多结合无人机技术的飞行机器人应运而生,在众多飞行机器人中,带臂无人机是一类受到广泛关注的机器人,通过无人机和机械臂的结合,使其兼具了无人机的灵活性、机动性和机械臂的交互能力,大大拓展了其应用场景。带臂无人机的机动性和交互性使其能够替代人类在一些危险或特殊场景下进行一些精细操作,有着巨大的发展潜力。
2、目前的带臂无人机大多基于多旋翼无人机进行设计,然而传统的多旋翼无人机仅有四个可控的自由度,这样的欠驱动性使得带臂无人机的位置控制和姿态控制之间存在耦合,对带臂无人机的定位精度和操作准确性带来了挑战,同时增加了控制系统设计的难度,极大地影响了带臂无人机在高空作业过程中的可靠性和安全性。虽然目前也存在一些基于全驱动多旋翼无人机的带臂无人机,但由于其控制技术复杂且可靠性较低,仍然难以进行实际应用。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的之一是:提供一种带臂无人机,能够增加对无人机俯仰动作的独立控制,实现更高精度的跟踪和定位。
2、本发明的目的之二是:提供一种带臂无人机的控制方法。
3、为了达到上述目的,本发明采用如下技术方案:
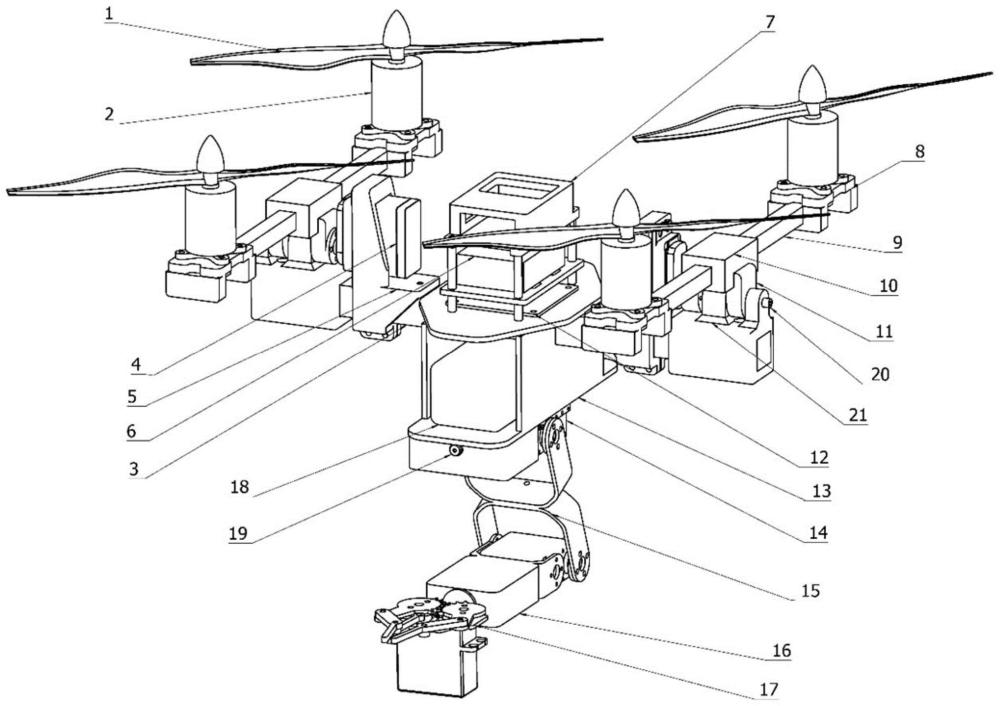
4、一种带臂无人机,包括倾转四旋翼无人机、机械臂和控制模块;
5、倾转四旋翼无人机的机身上装有视觉模块和定位模块,用于目标检测和定位,机身的两侧分别设有倾转驱动装置;
6、每个倾转驱动装置均驱动连接有倾转臂,倾转臂由机身的前方水平延伸至机身的后方,倾转驱动装置用于驱使倾转臂在竖直平面内旋转;
7、每个倾转臂的两端分别设有旋翼机构;
8、倾转驱动装置与控制模块连接,控制模块用于控制倾转驱动装置的动作;
9、机械臂安装在倾转四旋翼无人机的正下方,机械臂末端适配安装不同类型的末端执行器。
10、进一步地,倾转驱动装置包括舵机和舵盘,舵机固接于机身,舵机和倾转臂之间通过舵盘连接。
11、进一步地,倾转臂包括倾转臂固定件、倾转臂横杆和支撑轴,支撑轴水平铰接于机身,倾转臂固定件固接于舵盘且套接于支撑轴,倾转臂横杆的中部固接于倾转臂固定件,旋翼机构包括电机和桨叶,倾转臂横杆的两端分别安装有电机,电机驱动连接于桨叶。
12、进一步地,机身固接有倾转底座,倾转底座间隔设有两个向上的凸起,支撑轴水平穿设于两个凸起,倾转臂嵌设于两个凸起之间。
13、进一步地,机身包括有横梁,横梁由机身的左侧延伸至机身的右侧,横梁垂直于两侧的倾转臂横杆,倾转底座和舵机分别固接于横梁。
14、进一步地,机械臂内置有控制核心板,用于识别所连接的末端执行器设备id并与控制模块进行通讯以调整末端执行器的控制模式,实现不同末端执行器的兼容。
15、一种带臂无人机的控制方法,包括以下步骤,
16、通过倾转驱动装置驱使倾转臂在竖直平面内旋转,使倾转臂以及设置于倾转臂两端的旋翼机构产生倾斜;
17、通过驱动旋翼机构产生升力,升力方向随着倾转臂的倾转而改变,增加对无人机俯仰动作的独立控制。
18、进一步地,计算无人机到达目标位置所需的电机升力和力矩;
19、利用控制分配方案,将计算出的电机升力和力矩转换为所需的舵机倾转角和电机转速;
20、根据转换结果相应调节舵机的转角和电机的转速。
21、进一步地,分配方案包括,通过受力分析,得到舵机转角和电机转速产生电机升力和力矩的映射关系,通过代换,将电机升力和力矩到舵机转角和电机转速的映射关系求解问题转换为二次规划问题;
22、利用拉格朗日乘子法求解二次规划问题,得到一组最优解,从而得到电机升力和力矩到舵机转角和电机转速的映射关系。
23、进一步地,整体控制流程包括以下步骤,
24、自动识别安装于机械臂末端的末端执行器类型并匹配控制模式;
25、进入飞行模式,机械臂收缩在无人机正下方并保持相对静止状态,根据给定目标作业点的信息,通过定位模块和控制模块,控制无人机飞往目标作业点附近;
26、通过定位模块和视觉模块判断到达适合作业的位置,切换到作业模式,控制模块控制无人机保持姿态和位置稳定;
27、通过视觉模块识别作业目标,并通过控制模块控制机械臂末端接近作业点进行作业;
28、确认完成当前作业任务后切换为飞行模式,飞往下一个目标作业点;
29、重复上述步骤直至完成所有作业任务并返回。
30、总的说来,本发明具有如下优点:
31、1、本发明中的倾转四旋翼无人机在传统四旋翼无人机的基础上,通过在机身的两侧设置倾转驱动装置,能够在竖直平面内旋转倾转臂,改变旋翼机构产生的升力方向,增加了对无人机俯仰动作的独立控制,能够实现更高精度的跟踪和定位。相比于现有的全驱动多旋翼无人机,本发明中的无人机拥有较少的执行器机构,便于带臂无人机的实际应用。
32、2、本发明设计的一种带臂无人机构建了一个空中交互平台,通过在机械臂末端设计统一的接口,实现了不同类型的末端执行器的兼容和自动识别,使得带臂无人机能够实现不同类型作业任务的处理,提高了其适用范围,拓展了应用空间。
技术特征:1.一种带臂无人机,其特征在于:包括倾转四旋翼无人机、机械臂和控制模块;
2.根据权利要求1所述的一种带臂无人机,其特征在于:倾转驱动装置包括舵机和舵盘,舵机固接于机身,舵机和倾转臂之间通过舵盘连接。
3.根据权利要求2所述的一种带臂无人机,其特征在于:倾转臂包括倾转臂固定件、倾转臂横杆和支撑轴,支撑轴水平铰接于机身,倾转臂固定件固接于舵盘且套接于支撑轴,倾转臂横杆的中部固接于倾转臂固定件,旋翼机构包括电机和桨叶,倾转臂横杆的两端分别安装有电机,电机驱动连接于桨叶。
4.根据权利要求3所述的一种带臂无人机,其特征在于:机身固接有倾转底座,倾转底座间隔设有两个向上的凸起,支撑轴水平穿设于两个凸起,倾转臂嵌设于两个凸起之间。
5.根据权利要求4所述的一种带臂无人机,其特征在于:机身包括有横梁,横梁由机身的左侧延伸至机身的右侧,横梁垂直于两侧的倾转臂横杆,倾转底座和舵机分别固接于横梁。
6.根据权利要求1所述的一种四旋翼无人机,其特征在于:机械臂内置有控制核心板,用于识别所连接的末端执行器设备id并与控制模块进行通讯以调整末端执行器的控制模式,实现不同末端执行器的兼容。
7.权利要求1-6任一项所述的一种带臂无人机的控制方法,其特征在于:包括以下步骤,
8.根据权利要求7所述的一种带臂无人机的控制方法,其特征在于:计算无人机到达目标位置所需的电机升力和力矩;
9.根据权利要求8所述的一种带臂无人机的控制方法,其特征在于:分配方案包括,通过受力分析,得到舵机转角和电机转速产生电机升力和力矩的映射关系,通过代换,将电机升力和力矩到舵机转角和电机转速的映射关系求解问题转换为二次规划问题;
10.根据权利要求8所述的一种带臂无人机的控制方法,其特征在于:整体控制流程包括以下步骤,
技术总结本发明涉及一种带臂无人机及其控制方法,带臂无人机包括倾转四旋翼无人机、机械臂和控制模块;倾转四旋翼无人机包括机身、倾转驱动装置和倾转臂,机械臂安装在机身下方,控制模块安装在机身上方,机身的两侧分别设有倾转驱动装置;每个倾转驱动装置驱动均连接有倾转臂,倾转臂由机身的前后延伸至机身的后方,倾转驱动装置用于驱使倾转臂在竖直平面内旋转;每个倾转臂的两端分别设有可驱动转动的旋翼机构;机械臂、倾转驱动装置和旋翼机构均由控制模块连接驱动。本发明中的带臂无人机增加了对无人机俯仰动作的独立控制,能够实现更高精度的跟踪和定位,使得带臂无人机可以进行更加精确的操作。技术研发人员:刘伟,林振威,徐大波,黄华杨受保护的技术使用者:华南理工大学技术研发日:技术公布日:2024/4/24本文地址:https://www.jishuxx.com/zhuanli/20240722/219843.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表