一种拍摄机构及无人机的制作方法
- 国知局
- 2024-08-01 05:28:12
本公开属于无人机,尤其涉及一种拍摄机构及无人机。
背景技术:
1、现有技术中,无人机的全景镜头通常使用上下升降收缩的方式,降落时下镜头到地面的距离很小,镜头的曲面顶部正对地面,容易被地面凸起的异物刮花、损坏,影响镜头的使用寿命,镜头需要经常维护。
技术实现思路
1、本公开的目的在于克服上述现有技术的不足,提供了一种拍摄机构及无人机,其通过镜头的转动,灵活调节镜头与机身本体的相对位置,有利于镜头保护。
2、第一方面,本公开提供了一种无人机,机身本体;
3、拍摄机构,包括旋转支架和分别设置于所述支架两端的镜头,所述旋转支架与所述机身本体转动连接;
4、驱动机构,所述驱动机构用于驱动所述旋转支架转动,以使所述镜头凸出所述机身本体的表面。
5、第二方面,本公开提供了一种无人机的拍摄机构,所述无人机包括机身本体,用于驱动拍摄机构转动的驱动机构,
6、所述拍摄机构转动连接于所述机身本体,
7、使所述拍摄机构相对于所述机身本体绕平行于横滚轴的第一旋转轴线转动至第一预设角度时,获取用于生成全景图像或全景视频的图像数据。
8、第三方面,本公开提供了一种无人机,包括机身本体及机臂,所述机身本体包括位于所述无人机的横滚轴方向的一端的头部以及位于所述横滚轴方向的另一端的尾部,所述机身的头部或靠近所述头部连接至少一对所述机臂,以及所述机身的尾部或靠近所述尾部连接至少一对所述机臂;
9、包括如第二方面中本公开提供的拍摄机构,所述拍摄机构转动连接于所述机身本体的头部或尾部。
10、第四方面,本公开提供一种无人机的控制方法,包括机身本体,以及如第二方面提供的拍摄机构,所述拍摄机构通过驱动机构转动连接于所述机身本体的头部或尾部,包括:
11、接收拍摄机构控制指令,所述拍摄机构控制指令用于使所述拍摄机构相对于所述机身本体绕平行于横滚轴的第一旋转轴线转动至第一预设角度;
12、获取驱动机构的状态信息;
13、根据所述状态信息和拍摄机构控制指令计算拍摄机构的姿态信息;
14、根据所述姿态信息输出一个或多个电机信号;
15、根据所述一个或多个电机信号,控制驱动机构调整拍摄机构到达第一预设角度;
16、控制拍摄机构获取用于生成全景图像或全景视频的图像数据。
17、第五方面,本公开提供一种无人机的拍摄机构,所述无人机包括机身本体,用于驱动拍摄机构转动的驱动机构,所述拍摄机构转动连接于所述机身本体,
18、使所述拍摄机构相对于所述机身本体绕平行于俯仰轴的第二旋转轴线转动至第二预设角度时,获取用于生成全景图像或全景视频的图像数据。
19、第六方面,本公开提供一种无人机,包括机身本体,所述机身本体包括位于所述无人机的横滚轴方向的一端的头部以及位于所述横滚轴方向的另一端的尾部,所述无人机包括连接于所述机身的头部或靠近所述头部的至少一对所述机臂,以及连接于所述机身的尾部或靠近所述尾部的至少一对所述机臂;其特征在于,包括如第五方面本公开提供的拍摄机构,所述拍摄机构转动连接于所述机身本体的头部或尾部。
20、第七方面,本公开提供一种无人机,包括机身本体及机臂,所述机身本体包括位于所述无人机的横滚轴方向的一端的头部以及位于所述横滚轴方向的另一端的尾部,所述机身的头部或靠近所述头部连接至少一对所述机臂,以及所述机身的尾部或靠近所述尾部连接至少一对所述机臂;包括如第五方面本公开提供的拍摄机构,所述拍摄机构转动连接于所述机身本体的头部或尾部。
21、第八方面,本公开提供一种无人机的控制方法,包括机身本体,以及如第五方面本公开提供的拍摄机构,所述拍摄机构通过驱动机构转动连接于所述机身本体的头部或尾部,包括:
22、接收拍摄机构控制指令,所述拍摄机构控制指令用于使所述拍摄机构相对于所述机身本体绕平行于横滚轴的第二旋转轴线转动至第二预设角度;
23、获取驱动机构的状态信息;
24、根据所述状态信息和拍摄机构控制指令计算拍摄机构的姿态信息;
25、根据所述姿态信息输出一个或多个电机信号;
26、根据所述一个或多个电机信号,控制驱动机构调整拍摄机构到达第二预设角度;
27、控制拍摄机构获取用于生成全景图像或全景视频的图像数据。
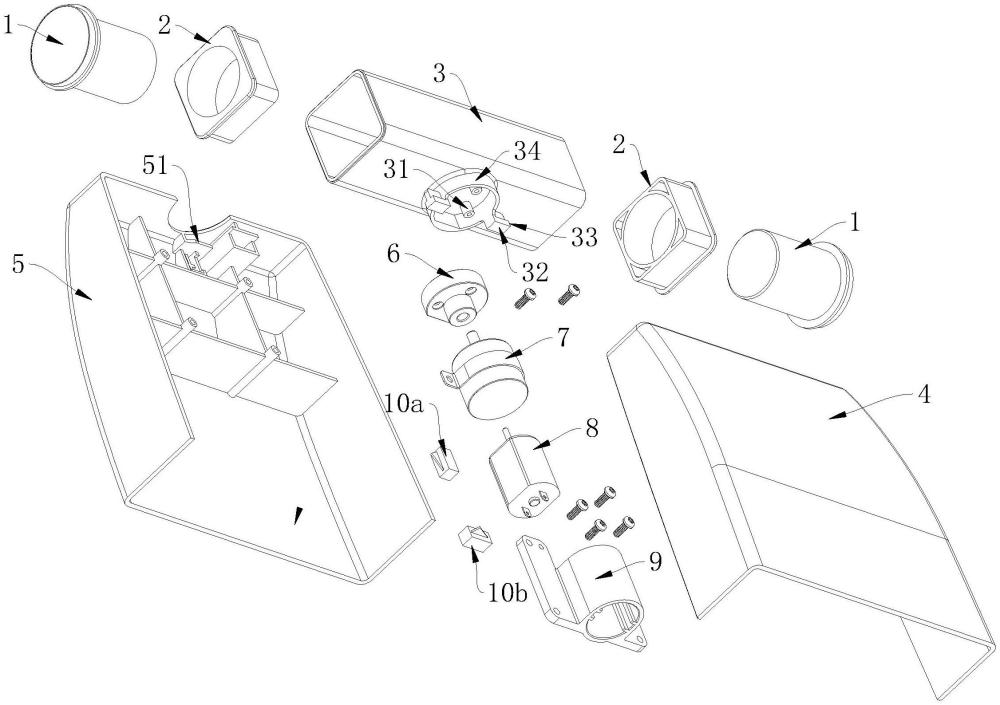
28、本公开所提供的拍摄机构及无人机,由于所述镜头固定连接于所述旋转支架,通过设置的所述驱动机构驱动所述旋转支架转动,于所述无人机需要拍摄时或飞行到一定高度后,可通过所述驱动机构驱动镜头转动,以使所述镜头凸出所述机身本体,不遮挡拍摄视角,有利于全景拍摄;于所述无人机准备起飞或降落时,通过所述驱动机构驱动镜头转动,以使所述镜头不凸出所述机身本体,使得镜头得以保护,以免镜头磕碰损坏。
技术特征:1.一种无人机的拍摄机构,所述无人机包括机身本体,用于驱动拍摄机构转动的驱动机构,其特征在于:
2.如权利要求1所述的拍摄机构,其特征在于,包括旋转支架和分别设置于所述旋转支架两端的镜头,所述驱动机构用于驱动所述旋转支架相对于所述机身本体绕平行于横滚轴的第一旋转轴线转动至第一预设角度时,使所述镜头凸出所述机身本体的顶端和底端,所述第一预设角度包括90°。
3.如权利要求2所述的拍摄机构,其特征在于,所述镜头包括超过180°视角的镜头,所述两个镜头的光轴重合,当所述旋转支架转动至平行于航向轴时,所述镜头凸出于所述机身本体的顶端和底端;当所述旋转支架转动至平行于俯仰轴时,所述镜头位于所述机身本体的顶端和底端之间。
4.如权利要求2所述的拍摄机构,其特征在于,两个所述镜头相对于所述旋转支架的旋转中心对称设置,或两个所述镜头相对于所述旋转支架的旋转中心非对称设置。
5.如权利要求2至4中任一项所述的拍摄机构,其特征在于,所述驱动机构包括定子组件及定位组件,所述定位组件用于使所述拍摄机构在设定的位置停止转动,所述定子组件固定连接旋转支架,或所述定子组件固定连接机身本体。
6.如权利要求2至4中任一项所述的拍摄机构,其特征在于,所述无人机包括定位组件,所述定位组件用于使所述拍摄机构在设定的位置停止转动。
7.如权利要求6所述的拍摄机构,其特征在于,所述定位组件包括控制开关及触发部,所述触发部固定设置于所述旋转支架,所述控制开关设置于所述机身本体,并可由所述触发部触发,所述控制开关连接于所述驱动机构;所述控制开关包括第一开关和第二开关,当所述旋转支架转动至平行于航向轴时,所述触发部触发所述第一开关;当所述旋转支架转动至平行于俯仰轴时,所述触发部触发所述第二开关;或所述驱动机构包括伺服电机,所述定位组件包括连接于所述伺服电机的控制器。
8.如权利要求7所述的拍摄机构,其特征在于,所述机身本体设置有限位部,所述旋转支架具有抵接面,于所述触发部触发所述控制开关时,所述限位部与抵接面相抵接。
9.如权利要求2至4、7至8任一项所述的拍摄机构,其特征在于,所述旋转支架可转动至相对于所述机身本体的倾斜方向,以使所述镜头不凸出于所述机身本体的顶端和底端。
10.如权利要求9所述的拍摄机构,其特征在于,所述驱动机构包括驱动组件和传动组件,所述传动组件分别与所述驱动组件和所述拍摄机构相连接;所述驱动机构还包括联轴器,所述旋转支架靠近于所述机身本体的一侧具有连接部,所述传动组件具有输出轴和输入轴,所述输入轴连接于所述驱动组件,所述输出轴连接于所述联轴器,所述联轴器连接于所述连接部。
11.如权利要求9所述的拍摄机构,其特征在于,所述无人机还包括高度检测机构,于所述无人机下降到预设高度时,所述高度检测机构用于控制所述旋转支架转动至所述机身本体的横向。
12.如权利要求11所述的拍摄机构,其特征在于,所述无人机还包括位置检测控制机构,所述位置检测控制机构包括检测模块和控制模块,所述控制模块与所述驱动机构电连接,所述检测模块用于检测所述拍摄机构的位置状态并向所述控制模块输入电信号,所述控制模块根据所述检测模块的电信号控制所述驱动机构启动或停止。
13.一种无人机,包括机身本体及机臂,所述机身本体包括位于所述无人机的横滚轴方向的一端的头部以及位于所述横滚轴方向的另一端的尾部,所述机身的头部或靠近所述头部连接至少一对所述机臂,以及所述机身的尾部或靠近所述尾部连接至少一对所述机臂;其特征在于,
14.一种无人机的拍摄机构,所述无人机包括机身本体,用于驱动拍摄机构转动的驱动机构,其特征在于:所述拍摄机构转动连接于所述机身本体,
15.如权利要求14所述的拍摄机构,其特征在于,所述无人机的机身本体的横滚轴方向设有沿轴向敞开的凹槽,所述拍摄机构包括旋转支架和分别设置于所述支架两端的镜头,所述旋转支架可拆卸地安装到所述凹槽,所述驱动机构用于驱动所述旋转支架相对于所述机身本体绕平行于俯仰轴的第二旋转轴线转动至第二预设角度时,使所述镜头凸出所述机身本体的顶端和底端,所述第二预设角度包括90°。
16.如权利要求15所述的拍摄机构,所述凹槽包括夹持段,所述拍摄机构与所述夹持段旋转连接,其中,所述夹持段的横截面呈圆弧形,所述夹持段的径向开口所对圆心角小于180°。
17.如权利要求15所述的拍摄机构,其特征在于,所述镜头包括超过180°视角的镜头,所述两个镜头的光轴重合,当所述旋转支架转动至平行于航向轴时,所述镜头凸出于所述机身本体的顶端和底端;当所述旋转支架转动至平行于横滚轴时,所述镜头位于所述机身本体的顶端和底端之间。
18.如权利要求15所述的拍摄机构,其特征在于,两个所述镜头相对于所述旋转支架的旋转中心对称设置,或两个所述镜头相对于所述旋转支架的旋转中心非对称设置。
19.如权利要求15至18中任一项所述的拍摄机构,其特征在于,所述驱动机构包括电机,所述电机包括定子组件及定位组件,所述定位组件用于使所述拍摄机构在设定的位置停止转动,所述定子组件固定连接旋转支架,或所述定子组件固定连接机身本体。
20.如权利要求15至18中任一项所述的拍摄机构,其特征在于,所述无人机包括定位组件,所述定位组件用于使所述拍摄机构在设定的位置停止转动。
21.如权利要求20所述的拍摄机构,其特征在于,所述定位组件包括控制开关及触发部,所述触发部固定设置于所述旋转支架,所述控制开关设置于所述机身本体,并可由所述触发部触发,所述控制开关连接于所述驱动机构;所述控制开关包括第一开关和第二开关,当所述旋转支架转动至平行于航向轴时,所述触发部触发所述第一开关;当所述旋转支架转动至平行于横滚轴时,所述触发部触发所述第二开关;或所述驱动机构包括伺服电机,所述定位组件包括连接于所述伺服电机的控制器。
22.如权利要求21所述的拍摄机构,其特征在于,所述机身本体设置有限位部,所述旋转支架具有抵接面,于所述触发部触发所述控制开关时,所述限位部与抵接面相抵接。
23.如权利要求15至18、21至22任一项所述的拍摄机构,其特征在于,所述旋转支架可转动至相对于所述机身本体的倾斜方向,以使所述镜头不凸出于所述机身本体的顶端和底端。
24.如权利要求23所述的拍摄机构,其特征在于,所述驱动机构包括驱动组件和传动组件,所述传动组件分别与所述驱动组件和所述拍摄机构相连接;所述驱动机构还包括联轴器,所述旋转支架靠近于所述机身本体的一侧具有连接部,所述传动组件具有输出轴和输入轴,所述输入轴连接于所述驱动组件,所述输出轴连接于所述联轴器,所述联轴器连接于所述连接部。
25.如权利要求24所述的拍摄机构,其特征在于,所述无人机还包括高度检测机构,于所述无人机下降到预设高度时,所述高度检测机构用于控制所述旋转支架转动至所述机身本体的横向。
26.如权利要求25所述的拍摄机构,其特征在于,所述无人机还包括位置检测控制机构,所述位置检测控制机构包括检测模块和控制模块,所述控制模块与所述驱动机构电连接,所述检测模块用于检测所述拍摄机构的位置状态并向所述控制模块输入电信号,所述控制模块根据所述检测模块的电信号控制所述驱动机构启动或停止。
27.一种无人机,包括机身本体,所述机身本体包括位于所述无人机的横滚轴方向的一端的头部以及位于所述横滚轴方向的另一端的尾部,所述无人机包括连接于所述机身的头部或靠近所述头部的至少一对机臂,以及连接于所述机身的尾部或靠近所述尾部的至少一对机臂;其特征在于,包括所述权利要求14至26任一项所述的拍摄机构,所述拍摄机构转动连接于所述机身本体的头部或尾部。
技术总结本公开适用于无人机的拍摄机构技术领域,提供了一种拍摄机构及无人机,包括机身本体、拍摄机构和驱动机构,所述拍摄机构包括旋转支架和镜头,所述镜头固定连接于所述旋转支架,所述旋转支架与所述机身本体转动连接;所述驱动机构连接于所述机身本体,所述驱动机构用于驱动所述旋转支架转动以使所述镜头凸出所述机身本体。本公开所提供的一种无人机,其通过镜头的转动,灵活调节镜头与机身本体的相对位置,有利于镜头保护以及拍摄时不遮挡镜头的拍摄视角,结构简单,实用性佳。技术研发人员:张蕾,高禧,张桂林,高飞受保护的技术使用者:影石创新科技股份有限公司技术研发日:20230609技术公布日:2024/4/24本文地址:https://www.jishuxx.com/zhuanli/20240722/219924.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种户外落难人员搜救装置
下一篇
返回列表