一种控制装置、脚蹬阶跃操纵机构和方法与流程
- 国知局
- 2024-08-01 05:28:55
本申请属于直升机飞行品质试验,具体涉及一种控制装置、脚蹬阶跃操纵机构和方法。
背景技术:
1、随着现代直升机技术的不断发展,直升机以其特有的起降方式以及低空作业能力,在救援、灭火、运输、旅游等领域得到越来越多的应用。而操纵性是用来衡量改变直升机飞行状态能力的度量,是衡量直升机性能好坏的最重要的指标之一,良好的操纵性可以使直升机能更迅速从一种飞行状态转换到另一种飞行状态,因此,如何科学、合理的给出直升机操纵性指标成为直升机飞行品质试验的重要内容之一。
2、按照最新的飞行品质规范,将直升机的操纵性根据响应幅度分为小幅度、中等幅度姿态敏捷、大幅姿态变化三个科目,其中,中等幅度姿态敏捷以及大幅姿态变化均涉及到脚蹬阶跃操纵(驾驶员利用脚蹬实现航向控制),该动作要求驾驶员在0.2秒内完成近似标准的阶跃输入,然后保持4~6秒,如图1所示。由于直升机脚蹬并没有所谓的“力感系统”,试飞员在进行脚蹬阶跃输入时,往往无法感知脚蹬输入的幅值,因此会带来以下问题:
3、阶跃操纵时往往存在较大的超调量,不符合标准脚蹬输入要求,如图2所示;而脚蹬输入幅值过小,直升机无响应;脚蹬输入幅值过大,可能会引起姿态变化过大、振荡发散以及尾桨/尾梁受到较大的剪切力引起的结构受损尤其是近地面。
4、因此,在飞行试验中,将近地面的中等幅度姿态敏捷以及大幅姿态变化定为风险科目。基于此背景,设计出一种控制装置、脚蹬阶跃操纵机构和方法,用来辅助驾驶员进行固定幅值的标准脚蹬阶跃输入,从而降低试飞风险、提高试飞效率。
技术实现思路
1、本发明的目的是:提出一种控制装置、脚蹬阶跃操纵机构和方法,该控制装置和脚蹬阶跃操纵机构可以辅助试飞员固定幅值的标准脚蹬阶跃输入,从而降低试飞风险、提高试飞效率、减小试飞架次。
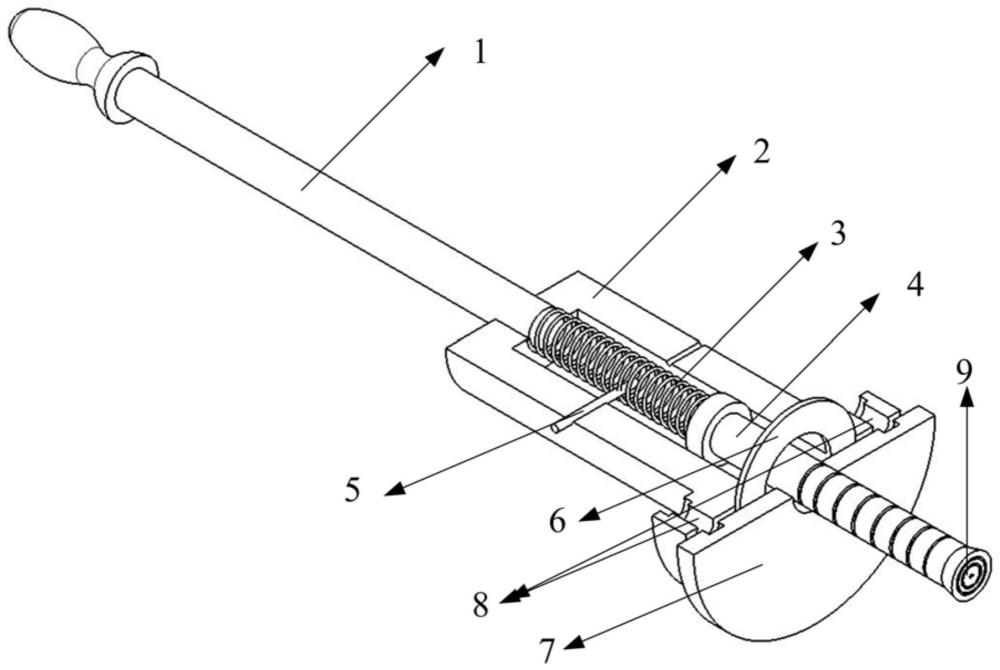
2、第一方面,本申请提供了一种控制装置,所述控制装置包括:
3、t型套筒,包括固定销螺纹孔;
4、环形基座,与所述t型套筒的一端连接;其中,所述环形基座包括圆孔;
5、标尺杆,所述标尺杆的一端设置在所述t型套筒,所述标尺杆的另一端能够穿过所述圆孔;
6、弹性部件,设置在所述t型套筒内,所述弹性部件的一端与所述t型套筒内的底端面固定连接,所述弹性部件的另一端与所述标尺杆的一端接触;
7、固定销,用于穿过所述固定销螺纹孔和弹性部件,对所述弹性部件进行压缩和限位。
8、优选地,所述t型套筒包括:
9、t型套筒空腔,包括开口,所述t型套筒空腔用于容纳所述弹性部件和标尺杆;其中,所述环形基座设置在所述开口。
10、优选地,所述控制装置还包括:
11、手柄杆,与所述t型套筒连接。
12、优选地,所述控制装置还包括:
13、环形垫圈,设置在所述环形基座与所述t型套筒之间。
14、优选地,所述标尺杆上设置有均匀刻度。
15、第二方面,本申请还提供了一种脚蹬阶跃操纵机构,所述操纵机构包括如前所述的控制装置;所述操纵机构还包括:左侧驾驶员脚蹬机构和右侧驾驶员脚蹬机构;
16、其中,所述左侧驾驶员脚蹬机构和右侧驾驶员脚蹬机构同向联动;所述控制装置抵触在所述左侧驾驶员脚蹬机构或右侧驾驶员脚蹬机构。
17、优选地,所述左侧驾驶员脚蹬机构包括:
18、第一左脚蹬;
19、第一右脚蹬,与所述第一左脚蹬反向联动;
20、所述右侧驾驶员脚蹬机构包括:
21、第二左脚蹬;
22、第二右脚蹬,与所述第二左脚蹬反向联动;
23、其中,所述第一左脚蹬与第二左脚蹬同向联动,所述第一右脚蹬与所述第二右脚蹬同向联动;所述控制装置抵触在所述第一左脚蹬、第一右脚蹬、第二左脚蹬和第二右脚蹬中的任意一个脚蹬上。
24、第三方面,本申请还提供了一种脚蹬阶跃操纵方法,所述方法应用于如前所述的操纵机构;
25、所述方法包括:
26、所述第一左脚蹬获取阶跃输入;
27、所述第一左脚蹬基于所述阶跃输入向第一方向运动,所述第二右脚蹬向第二方向运动,所述标尺杆缩回所述t型套筒空腔,所述第二右脚蹬与所述环形基座接触,所述环形基座限制所述第二右脚蹬向第二方向运动,完成所述第一左脚的阶跃操纵;
28、其中,所述标尺杆的另一端抵触在所述第二右脚蹬;所述第一方向与所述第二方向相反。
29、本申请具有以下技术效果:
30、针对直升机脚蹬阶跃输入幅值难以控制从而造成引起姿态变化过大、振荡发散以及尾桨/尾梁受到较大的剪切力引起的结构受损等一系列风险,设计出一种控制装置、脚蹬阶跃操纵机构和方法,用来辅助驾驶员进行固定幅值的标准脚蹬阶跃输入,其核心在于利用弹性部件的伸缩性来控制标尺杆的伸出长度,并利用固定销来保持标尺杆伸出长度不变,驾驶员使用该控制装置和脚蹬机构相互配合,便可完成固定幅值的脚蹬阶跃输入,从而降低了试飞风险、提供了试飞效率。
技术特征:1.一种控制装置,其特征在于,所述控制装置包括:
2.根据权利要求1所述的控制装置,其特征在于,所述t型套筒包括:
3.根据权利要求1所述的控制装置,其特征在于,所述控制装置还包括:
4.根据权利要求1所述的控制装置,其特征在于,所述控制装置还包括:
5.根据权利要求1所述的控制装置,其特征在于,所述标尺杆上设置有均匀刻度。
6.一种脚蹬阶跃操纵机构,其特征在于,所述操纵机构包括如权利要求1-5任一项所述的控制装置;所述操纵机构还包括:左侧驾驶员脚蹬机构和右侧驾驶员脚蹬机构;
7.根据权利要求6所述的操纵机构,其特征在于,所述左侧驾驶员脚蹬机构包括:
8.一种脚蹬阶跃操纵方法,其特征在于,所述方法应用于如权利要求6-7任一项所述的操纵机构;
技术总结本申请提供了一种控制装置、脚蹬阶跃操纵机构和方法,所述控制装置包括:手柄杆、T型套筒、弹簧部件、标尺杆、固定销、环形垫圈、环形基座、沉头螺钉、防滑套,所述脚蹬阶跃操纵机构包括左侧驾驶员脚蹬机构A、右侧驾驶员脚蹬机构B、控制装置C;本申请提供的控制装置和脚蹬阶跃操纵机构能够用来辅助驾驶员进行固定幅值的标准脚蹬阶跃输入,从而降低试飞风险、提高试飞效率。技术研发人员:张超,杨文凤,肖升兴,宋招枘,刘国强受保护的技术使用者:中国飞行试验研究院技术研发日:技术公布日:2024/4/29本文地址:https://www.jishuxx.com/zhuanli/20240722/219982.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表