太阳电池阵列驱动的小行星采矿装置及方法与流程
- 国知局
- 2024-08-01 05:28:59
本发明属于深空探测飞行器领域,具体地,涉及一种太阳电池阵列驱动的小行星采矿装置及方法。
背景技术:
1、小行星是大约46亿年前太阳系形成时遗留下来的岩石碎片,被称为太阳系的“原始化石”,保存着太阳系形成初期的原始成分和演化历史,对其内部结构、物质组成的探测可为太阳系起源与演化提供重要线索,具有极高的科学探测价值。同时,小行星是金属、岩石和尘埃的聚集体,一颗小型、直径约十米的典型s型小行星约含有六百五十吨金属,其中包括稀有金属和可能从未在地球上存在的金属元素,对小行星资源的有效开发将成为未来人类矿产资源获取的重要途径。
2、小行星采矿已引起了国际社会的广泛关注,目前规划任务中可带回的小行星矿产样本数量均较为有限,且由于探测器规模较大发射成本高,当前尚未进行实际研制。
3、现有的小行星采矿方法包括接触式法、撞击法、核爆法、钻井法、动力推离法、抓捕法等,其中接触式法、撞击法、核爆法和钻井法受制于太空无重力环境、爆破效果等约束仅可获取部分小行星的样本,动力推离法和抓捕法理论上可将整颗小行星带回近地轨道,但抓捕法需将小行星抓捕至探测器,对捕获机构、探测器规模要求较高,而动力推力法的主要原理为在小行星上安装推力器,通过长时间的推力作用改变小行星轨道,对探测器自身要求不高。本发明以此为背景,提出一种太阳电池阵列驱动的小行星采矿装置,经检索,本发明在国内并未有发现一致的技术方案。
4、目前已有一些关于小行星采矿的研究,现有的相关技术成果主要如下:
5、(1)一种小行星采矿采样机械的锚定装置(专利文献cn113820168a)该专利文献公开了一种小行星采矿采样机械的锚定装置,主要包括多个设于采样机械周围的机械臂,以及设于机械臂端部的多段式钻头套管组成,通过膨胀锚定套管向外膨胀扩张形成嵌入小行星土壤内部的手指状卡爪,结合钻进螺纹套管头部处的钻进螺纹,在小行星表面进行固定。该专利文献主要针对小行星采矿的表面锚定环节,无法实现小行星附着和推离需求,仅可对局部区域的小行星样本进行取样,不具备将小行星整体推离至月球轨道进行整星采矿的能力。
6、(2)可分离式小行星探测器(专利文献cn105444811a)该专利文献公开了一种可分离式小行星探测器,包括上升器、采样驻留器和样品返回器,采样驻留器用于样品采集,上升器用于携带样品返回器返回地球,可实现小行星的附着、样品采样和驻留。但由于上升器从小行星起飞发射的质量有限,其携带的小行星样本质量有限,且采集的样本为小行星表面样品,不具备同时采集深层样本、不同位置样本的能力。
7、(3)一种撞击近地小行星的方法(专利文献cn114997043a)该专利文献公开了一种撞击近地小行星的方法,主要采用一箭双星发射撞击器与观测器,可实施小行星近距离飞越观测、单次撞击、撞后观测任务。专利主要目标为采用动能撞击形式防御危险小行星,撞击为单次撞击,不具备对小行星进行长时间动力推离的能力,因而无法进行小行星采样。
8、(4)碎片移除-小行星防御两用天基激光系统(专利文献cn111547271a)该专利文献公开了一种碎片移除-小行星防御两用天基激光系统,主要由多个具有相同参数的天基激光驱动平台组成,可利用激光器发射出的激光对小行星进行烧蚀,产生冲量改变其轨道。该方法通过减少小行星质量改变其轨道,对小行星轨道改变的控制能力有限,无法将小行星的轨道改变为月球轨道。
9、(5)一种用于深空撞击探测的辅助激光指示信标与自主导航测量系统(专利文献cn111538019a)该专利文献公开了一种用于深空撞击探测的辅助激光指示信标与自主导航测量系统,主要采用激光发射器向目标星表面发射激光并接收目标星表面反射的激光信号,为目标星环绕器提供距离测量导航信息,不具备对有优质矿产资源的小行星进行整星采矿的能力。
10、(6)一种捕捉和操控小行星的方法(专利文献cn104249819)该专利文献公开了一种捕捉和操控小行星的方法,采用捕捉网将小行星进行捕捉再通过飞行器拖曳来操控小行星的方式,而捕捉网技术仅适用于尺寸较小的小行星,对于大的小行星无法通过捕捉网进行捕捉;且捕捉网的捕捉控制难度较大,容易出现无法有效捕捉且脱落等风险;此外,捕捉网拖曳牵引过程中,由于两者为柔性连接,只能承载拉力,无法承载压力,因此随着推力器的变轨方向改变,极容易出现小行星与牵引卫星之间的碰撞等问题,对轨道设计及牵引卫星控制能力的要求极高。
11、针对现有技术中存在的技术问题,本专利提出一种太阳电池阵列驱动的小行星采矿装置。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种太阳电池阵列驱动的小行星采矿装置。
2、根据本发明提供的太阳电池阵列驱动的小行星采矿装置,包括:平台模块3、可收展太阳电池阵列附着模块100和电推进附着模块4;
3、多个可收展太阳电池阵列附着模块100其中的两个可收展太阳电池阵列附着模块100分别记为:第一可收展太阳电池阵列附着模块1、第二可收展太阳电池阵列附着模块2;
4、所述第一可收展太阳电池阵列附着模块1、第二可收展太阳电池阵列附着模块2与电推进附着模块4共同设置于平台模块3的顶端;
5、所述平台模块3在伴飞轨道上为电推进附着模块4以无线能源供应的方式进行供电,与可收展太阳电池阵列附着模块100互为备份,保证全天时的能源供应;
6、平台模块3接收地面发送的推力器推力指令,转发给电推进附着模块4。
7、优选地,所述平台模块3集成有:太阳电池阵列子模块31、集成推进姿轨控子模块32、通信中继子模块33、无线能源发射子模块34;
8、所述太阳电池阵列子模块31由三个排布于平台模块3外周的太阳能阵列组成;
9、所述集成推进姿轨控子模块32集成有:姿轨控发动机321和导航相机322;所述导航相机322根据平台模块3形状设置于平台模块3主体侧壁的位置,姿轨控发动机321根据姿轨控需求设置在平台模块3动力方向控制侧;所述通信中继子模块33集成有:中继定向天线331和测控天线332;所述中继定向天线331和多个所述测控天线332分布于平台模块3不同位置;
10、所述无线能源发射子模块34设置于平台模块3主体侧壁。
11、优选地,所述太阳电池阵列子模块31提供整体能源;
12、所述姿轨控子模块32进行全过程的姿态及轨道变化执行控制;
13、所述通信中继子模块33提供中继通信服务;
14、所述无线能源发射子模块34为电推进附着模块4提供能源传输服务。
15、优选地,所述可收展太阳电池阵列附着模块100集成有:附着机构子模块11、管理子模块12、无线能源发射子模块13、连接机器人子模块14、有线电缆子模块15、驱动机构子模块16、展开机构子模块17、分离子模块18;
16、所述管理子模块12、无线能源发射子模块13、连接机器人子模块14、有线电缆子模块15、驱动机构子模块16依次套设在可收展太阳电池阵列附着模块100主体内芯;
17、所述分离子模块18,采用单点连接于可收展太阳电池阵列附着模块100端部;所述附着机构子模块11设置于可收展太阳电池阵列附着模块100另一端。
18、优选地,所述附着机构子模块11使用时附着于小行星表面;
19、所述无线能源发射子模块13为电推进附着模块4提供能源;
20、所述有线电缆子模块15提供与电推进附着模块4的有线电缆管理;
21、所述驱动机构子模块16提供太阳能电池阵二维驱动;
22、所述展开机构子模块17具备太阳电池阵的收展能力;
23、所述分离子模块18实现与平台模块3的连接分离;
24、所述可收展太阳电池阵列附着模块100根据小行星自转轴与公转平面位置关系,对附着部署位置进行优化,依次从小行星伴飞轨道上分离,在收拢状态下分别附着部署,后利用机构进行展开,并根据太阳的位置调整帆板朝向太阳;保证每一时刻均至少有一太阳电池阵列受照;
25、所述可收展太阳电池阵列附着模块100以太阳电池阵列板为主体结构,通过无线加有线能源供应方式在受照时对多个电推进附着模块4进行供电。
26、优选地,所述电推进附着模块4集成有:附着机构子模块41、蓄电池子模块42、无线能源接收子模块43、有线电缆子模块44、电推进附着模块管理子模块45、通信子模块46、矢量调节子模块47、推进子模块48、电推进附着模块分离子模块49;
27、所述电推进附着模块附着机构子模块41设置于电推进附着模块4顶端;
28、所述电推进附着模块附着机构子模块41、蓄电池子模块42、无线能源接收子模块43、有线电缆子模块44、电推进附着模块管理子模块45、矢量调节子模块47依序连接;所述电推进附着模块分离子模块49设置于矢量调节子模块47另一侧作为电推进附着模块4另一端,并配合设置有推进子模块48于电推进附着模块4底部;所述通信子模块46设置于推进附着模块管理子模块45的外壁。
29、优选地,所述电推进附着模块附着机构子模块41,使用时附着于小行星表面;
30、所述蓄电池子模块42,用于存储接收到的电能;
31、所述无线能源接收子模块43,用于接收来自可收展太阳电池阵列附着模块100或来自平台模块3的电能;
32、所述有线电缆子模块44,用于提供与可收展太阳电池阵列附着模块100有线连接的接口
33、所述电推进附着模块管理子模块45,用于提供电推进附着模块4管理;
34、所述通信子模块46,用于接收来自平台模块的中继信息;
35、所述矢量调节子模块47,具备推力器方向矢量调节的能力;
36、所述推进子模块48,装备有推力器和燃料,具备动力推动能力;
37、所述电推进附着模块分离子模块49,实现与平台模块3的连接分离。
38、优选地,所述电推进附着模块4从小行星伴飞轨道上依次分离,分别附着部署于小行星表面不同位置,在无线能源接收范围内接收至少一个太阳电池阵列的供电;通过部署位置不同和推力矢量调节可全方向输出推力矢量;电推进附着模块4输出的推力方向为该时刻推力偏转效能最优方向,由地面发送推力指令,经平台模块3转发后电推进附着模块4按照指令输出推力。
39、优选地,两个可收展太阳电池阵列附着模块100分别部署于自转轴两极,以保证至少有1可收展太阳电池阵列附着模块处于光照区;
40、所述平台模块3根据该太阳与小行星间位置关系,运行于小行星晨昏伴飞轨道,可全天时受照,与可收展太阳电池阵列附着模块100互为备份,保证全天时的能源供应;
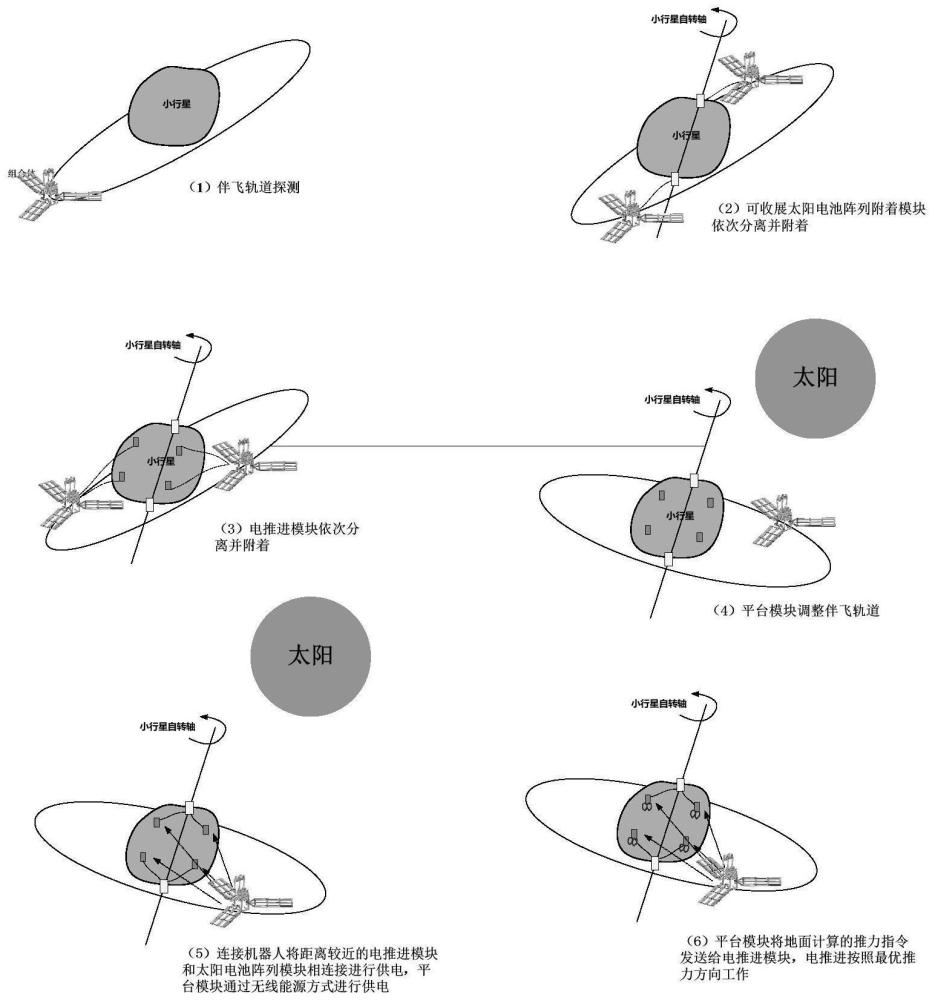
41、步骤s1:探测器整体飞至目标小行星附近,先对小行星进行伴飞探测,计算得出小行星自转轴;
42、步骤s2:分离可收展太阳电池阵列附着模块100,在小行星表面不同位置进行附着并展开太阳电池阵列,利用驱动机构调整帆板对日;
43、步骤s3:分离电推进附着模块4和平台模块3,分别部署于小行星表面不同位置并对小行星进行动力推离;
44、步骤s4:分离后的平台模块3根据可收展太阳电池阵列附着位置调整伴飞轨道,与可收展太阳电池阵列配合对电推进模块进行充电;
45、步骤s5:小行星在电推进附着模块4不断的推力作用下进入月球轨道,等待近地航天器处置。
46、优选地,步骤s1:探测器整体经过转移轨道抵达小行星附近并形成伴飞轨道;
47、步骤s2:所述太阳电池阵列驱动的小行星采矿装置根据小行星自转轴与公转平面的位置关系,依次分离可收展太阳电池阵列附着模块100,附着于小行星表面不同位置;
48、步骤s3:所述太阳电池阵列驱动的小行星采矿装置依次分离电推进附着模块4,附着于小行星表面不同位置;
49、步骤s4:平台模块3根据当前时刻太阳与小行星间位置关系,变轨至小行星晨昏伴飞轨道;
50、步骤s5:可收展太阳电池阵列附着模块100携带的连接机器人子模块14将电缆连接至附近的电推进附着模块4,用有线供电形式对电推进附着模块4进行供电;同时,可收展太阳电池阵列附着模块100和平台模块3配合,通过无线能源供应方式对距离较远的电推进附着模块进行供电;
51、步骤s6:地面按照小行星当前的位置速度计算出最优推力方向,发送推力指令,由平台模块3转发给各推力器,推力器按照地面指令持续输出推力,直至将整个小行星推力至月球轨道。
52、与现有技术相比,本发明具有如下的有益效果:
53、1、本发明在小行星表面不同位置分别部署推力矢量可调节电推进附着模块,保证电推进模块可在最优偏转方向持续输出推力。
54、2、本发明根据小行星自转轴与公转平面位置关系部署可收展太阳电池阵列附着模块,与在小行星伴飞轨道的平台模块配合,对多个电推进模块供电,供电为无线有线结合,提高覆盖性及供电效率,保证电推进模块能全天时工作。
55、3、与化学推进相比,本发明无需携带大量推进剂即可长时间、不间断地对小行星进行动力推离
56、4、本发明可将整个小行星推至月球轨道并由近地航天器捕获,完成对具有优质矿产资源的小行星的整星采矿。
57、5、本发明采用在小行星表面不同部位布置多组推力器,可根据小行星的尺寸大小设置推力组的数量及位置,提高可靠性、稳定性、灵活性,应用范围扩大。
58、6、本发明针对现有小行星捕捉技术中的缺陷,改善小行星捕捉及变轨状态的碰撞问题,提高小行星整星采矿效率。
本文地址:https://www.jishuxx.com/zhuanli/20240722/219990.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表