一种防止太阳能无人机着陆侧偏出跑道的方法及装置与流程
- 国知局
- 2024-08-01 05:23:29
本发明涉及一种防止太阳能无人机着陆侧偏出跑道的方法及装置,属于无人机着陆。
背景技术:
1、大中型太阳能无人机具有机翼翼展大、起降速度低、滑跑时间短的明显特点,大多数翼展在40m以上,起降速度通常在10m/s以内,滑跑时间通常在10s~20s。在着陆阶段,一旦受到侧风影响,极易出现侧偏而冲出跑道,发生倾倒或撞上航灯、指示牌等物体,对无人机造成较大的损伤。例如,假定跑道上有2m/s的正侧风,着陆滑跑过程20s,无人机将会偏离40m,冲出跑道的可能性很大。因此,无人机要想安全着陆,需要很宽的跑道或选择地面风很小的窗口进行着陆。
2、常用的军民机场跑道宽度均在45m~60m,地面出现5m/s左右的侧风也为大概率事件。现阶段对于大中型太阳能无人机着陆问题的解决办法,一是选择自建很宽的机场跑道或对标准机场跑道两侧进行拓宽,二是通过气象观测手段选择地面风尤其是侧风很小的窗口进行着陆。方法一的成本高、代价大、适用性不强,方法二的着陆窗口窄、对气象保障要求高,均严重制约了太阳能无人机的作业使用。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出了一种防止太阳能无人机着陆侧偏出跑道的方法及装置,通过对无人机着陆的高精度控制及着陆后撞网设计,防止无人机在着陆时出现侧偏而冲出跑道,减小对无人机造成的损伤。
2、本发明的技术解决方案是:
3、一种防止太阳能无人机着陆侧偏出跑道的装置,包括多张拦截网、多个支柱、缓冲垫;拦截网为编织绳网,各拦截网固定在支柱上,缓冲垫包裹在支柱上,支柱固定在机场跑道上;所有拦截网共同围成一个一端开口的多边形,开口面向太阳能无人机着陆滑跑的方向。
4、优选的,所述支柱包括固定支柱、活动支柱,固定支柱位于拦截网多边形的始端和末端,使用时安装于跑道地面;活动支柱为可拆卸结构,活动支柱由两瓣组成,两瓣之间通过螺栓连接,根据跑道及无人机尺寸布置在拦截网多变形的折角处。
5、优选的,所述支柱上方连接伸缩杆,伸缩杆为轻质碳纤维圆管结构;根据使用需求,调节伸缩杆长度。
6、优选的,拦截网采用高强凯夫拉材料。
7、一种防止太阳能无人机着陆侧偏出跑道的方法,应用上述装置,包括:
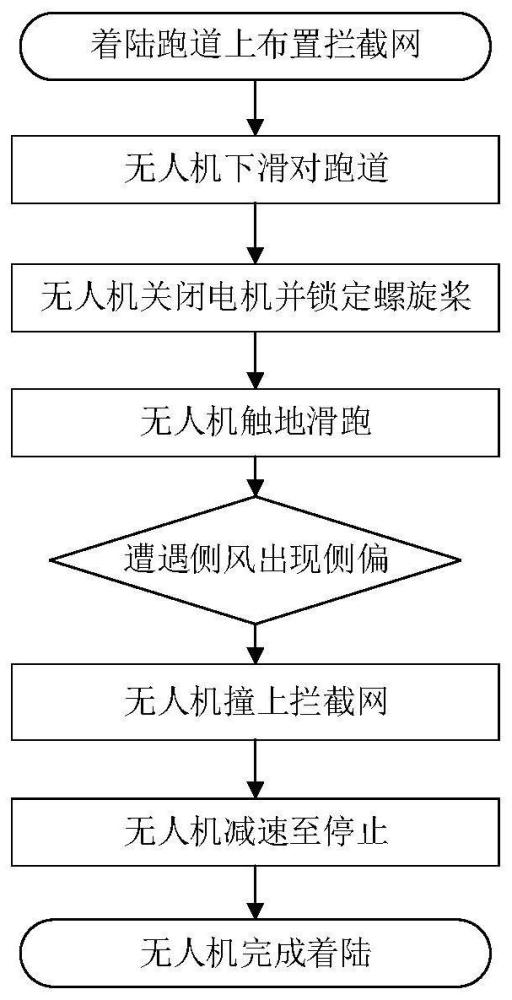
8、太阳能无人机着陆前,在跑道上布置拦截网、支柱、缓冲垫;
9、太阳能无人机下滑对准跑道,通过纵向高度控制与横航向侧偏控制,使无人机着陆在设定的落点位置;
10、太阳能无人机着陆后启动螺旋桨纠偏策略,无人机螺旋桨以无动力输出转速为基准,进行螺旋桨纠偏;当太阳能无人机滑跑速度降低至5m/s,关闭动力电机,锁定螺旋桨;
11、太阳能无人机撞网后减速至停止状态,完成着陆。
12、优选的,根据反馈的太阳能无人机高度信号,设计的纵向高度控制方法为:
13、
14、其中,δz为升降舵,为俯仰角控制增益,θ为俯仰角,θc为着陆指令俯仰角,为俯仰角速率控制增益,ωz为俯仰角速率,为高度控制增益,h为无人机高度,hc为着陆时指令高度,为高度积分控制增益。
15、优选的,陆指令俯仰角与着陆高度指令结合着陆陡下滑、浅下滑、下滑过渡段进行设计,过渡段采用指数加浅直线拉起轨迹线设计,对应的俯仰角指令与高度指令均为指数表达形式。
16、优选的,横航向侧偏控制以偏航角控制为内回路,以侧偏比例控制为外回路的控制方式,方向舵增加荷兰滚阻尼和侧偏控制。
17、优选的,螺旋桨纠偏策略采用左右螺旋桨差动进行侧偏控制,以无人机减速时螺旋桨无动力输出转速为基准,根据侧偏与偏航角进行螺旋桨差动控制。
18、本发明与现有技术相比的优点在于:
19、(1)本发明通过在跑道两侧和前方加装拦截装置,可防止太阳能无人机在着陆时出现侧偏而冲出跑道,减小对无人机造成的损伤,使太阳能无人机在着陆阶段摆脱了对宽跑道和小风气象条件的依赖。
20、(2)本发明适用于太阳能无人机等低速自主滑跑起降的飞行器,设计的拦截装置采用网状结构,可根据飞机尺寸和跑道尺寸进行调节,适应各种跑道,成本低、安装简单、操作方便。
技术特征:1.一种防止太阳能无人机着陆侧偏出跑道的装置,其特征在于,包括多张拦截网、多个支柱、缓冲垫;拦截网为编织绳网,各拦截网固定在支柱上,缓冲垫包裹在支柱上,支柱固定在机场跑道上;所有拦截网共同围成一个一端开口的多边形,开口面向太阳能无人机着陆滑跑的方向。
2.根据权利要求1所述装置,其特征在于,所述支柱包括固定支柱、活动支柱,固定支柱位于拦截网多边形的始端和末端,使用时安装于跑道地面;活动支柱为可拆卸结构,活动支柱由两瓣组成,两瓣之间通过螺栓连接,根据跑道及无人机尺寸布置在拦截网多变形的折角处。
3.根据权利要求1或2所述装置,其特征在于,所述支柱上方连接伸缩杆,伸缩杆为轻质碳纤维圆管结构;根据使用需求,调节伸缩杆长度。
4.根据权利要求1所述装置,其特征在于,拦截网采用高强凯夫拉材料。
5.一种防止太阳能无人机着陆侧偏出跑道的方法,应用权利要求1所述的装置,其特征在于,包括:
6.根据权利要求5所述的一种防止太阳能无人机着陆侧偏出跑道的方法,其特征在于,根据反馈的太阳能无人机高度信号,设计的纵向高度控制方法为:
7.根据权利要求6所述的一种防止太阳能无人机着陆侧偏出跑道的方法,其特征在于,陆指令俯仰角与着陆高度指令结合着陆陡下滑、浅下滑、下滑过渡段进行设计,过渡段采用指数加浅直线拉起轨迹线设计,对应的俯仰角指令与高度指令均为指数表达形式。
8.根据权利要求5所述的一种防止太阳能无人机着陆侧偏出跑道的方法,其特征在于,横航向侧偏控制以偏航角控制为内回路,以侧偏比例控制为外回路的控制方式,方向舵增加荷兰滚阻尼和侧偏控制:
9.根据权利要求5所述的一种防止太阳能无人机着陆侧偏出跑道的方法,其特征在于,螺旋桨纠偏策略采用左右螺旋桨差动进行侧偏控制,以无人机减速时螺旋桨无动力输出转速为基准,根据侧偏与偏航角进行螺旋桨差动控制。
技术总结本发明公开了一种防止太阳能无人机着陆侧偏出跑道的方法及装置,该装置包括多张拦截网、多个支柱、缓冲垫;拦截网为编织绳网,各拦截网固定在支柱上,缓冲垫包裹在支柱上,支柱固定在机场跑道上;所有拦截网共同围成一个一端开口的多边形,开口面向太阳能无人机着陆滑跑的方向。通过对无人机着陆的高精度控制及着陆后撞网设计,可防止太阳能无人机在着陆时出现侧偏而冲出跑道,减小对无人机造成的损伤,使太阳能无人机在着陆阶段摆脱了对宽跑道和小风气象条件的依赖。技术研发人员:张凯,宋璟,李文博,李广佳,王茜受保护的技术使用者:中国航天空气动力技术研究院技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/219488.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表