一种勘查无人机
- 国知局
- 2024-08-01 05:29:02
本技术属于无人机领域,具体涉及一种勘查无人机。
背景技术:
1、无人机是一种以无线电遥控或者自身程序控制为主的非载人飞行器,其具有体积小、造价低、使用方便等优点,广泛用于空中侦察、监视、通信、反潜、电子干扰等领域。目前,无人机目标跟踪多采用拍摄视频图像,并人为进行跟踪拍摄,实现目标锁定。
2、授权公开号“cn208110390u”记载了“一种无人机目标跟踪系统,包括机架本体,以机架本体中心呈轴对称和/或中心对称分布的数个飞翼,设置在机架本体内的stm32l0中央处理芯片,分别与中央处理芯片连接的存储器、射频收发器、矢量角度仪、高度传感器、加速度计、陀螺仪、图像处理模块、飞行驱动器,与射频发生器连接的无线遥控器,设置在飞翼上且与飞行驱动器连接的直流马达,与直流马达连接的旋转桨叶,与图像处理模块连接的视频编码器,与视频编码器连接、且设置在机架本体底部的红外摄像头,以及设置在红外摄像头与机架本体之间、且与中央处理芯片连接、用于驱动该红外摄像头转动的伺服电机。通过上述方案,本实用新型具有结构简单、跟踪可靠、准确定位等优点”。
3、上述专利具有结构简单、跟踪可靠、准确定位等优点,但上述专利在进行图像采集结束后需要进行降落,由于降落后没有支撑结构,使得在降落时无人机容易出现碰撞损坏,同时会损坏红外摄像头。
技术实现思路
1、本实用新型的目的在于提供一种勘查无人机,旨在解决现有技术中的无人机在进行图像采集结束后需要进行降落,由于降落后没有支撑结构,使得在降落时无人机容易出现碰撞损坏,同时会损坏红外摄像头的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种勘查无人机,包括:
4、无人机主体;
5、横板,其固定连接于无人机主体的侧壁之间;
6、调节机构,设于无人机主体和横板上;
7、红外摄像头,其设置有两个,两个所述红外摄像头对称设置于调节机构上,且调节机构用于调节两个红外摄像头的拍摄角度;
8、伸缩支撑机构,设于无人机主体上,所述伸缩支撑机构用于支撑无人机主体;
9、蓄电池,其固定连接于横板的顶部;以及
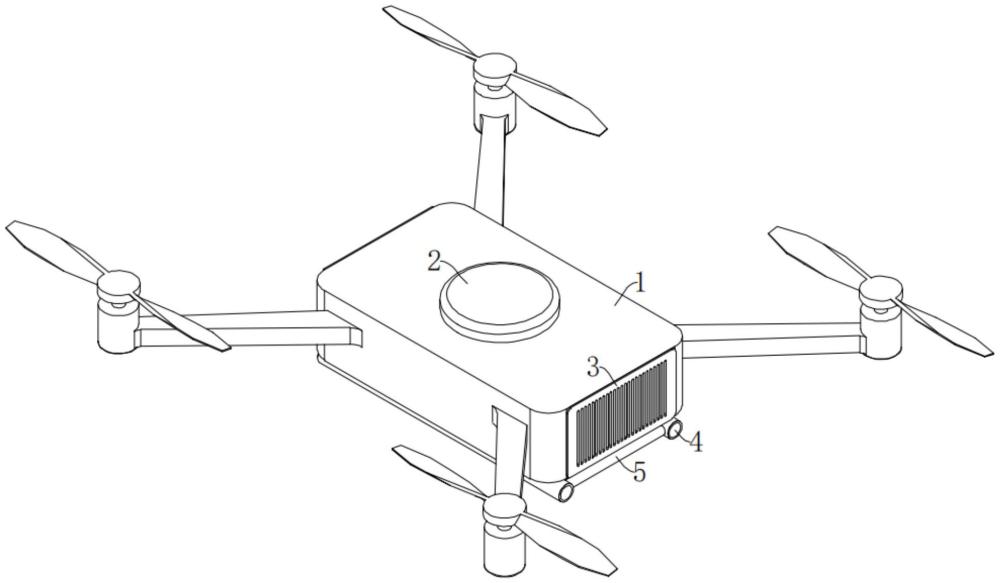
10、信号收发器,其固定连接于无人机主体的顶部。
11、作为本实用新型一种优选的方案,所述调节机构包括:
12、转动部件,其设置有两组,两组所述转动部件对称设置于无人机主体上;以及
13、驱动部件,设于横板上,所述驱动部件均与两组转动部件连接。
14、作为本实用新型一种优选的方案,每组所述转动部件均包括安装盘和转轴,所述转轴转动连接于无人机主体的下内壁,且转轴的一端转动贯穿无人机主体并延伸至无人机主体的下侧,所述安装盘固定连接于转轴的底部。
15、作为本实用新型一种优选的方案,所述驱动部件包括齿轮和正反转电机,所述齿轮设置有两个,每个所述齿轮均固定连接于每个转轴的顶部,两个所述齿轮相互啮合,且两个齿轮均位于无人机主体内侧,所述正反转电机固定连接于横板的顶部,且正反转电机的输出端转动贯穿横板并与其中一个齿轮固定连接。
16、作为本实用新型一种优选的方案,所述伸缩支撑机构包括:
17、支撑部件,其设置有两组,两组所述支撑部件对称设置于无人机主体上;以及
18、电动伸缩杆,其设置有两个,每个所述电动伸缩杆均固定连接于无人机主体的下内壁,且每个电动伸缩杆的伸长端均活动贯穿无人机主体并与每组支撑部件连接。
19、作为本实用新型一种优选的方案,每组所述支撑部件均包括支撑横杆和定位滑杆,所述定位滑杆设置有两个,两个所述定位滑杆均活动插接于无人机主体的下内壁,且两个定位滑杆均活动贯穿无人机主体并延伸至无人机主体的下侧,所述支撑横杆固定连接于两个定位滑杆的底部。
20、作为本实用新型一种优选的方案,两个所述支撑横杆之间固定连接有两个连接杆对称设置,且两个连接杆对称设置。
21、作为本实用新型一种优选的方案,所述无人机主体的侧端固定连接有散热板。
22、与现有技术相比,本实用新型的有益效果是:
23、1、本方案中,通过定位滑杆活动插接于无人机主体上,使得定位滑杆可以在无人机主体上滑动,两个定位滑杆的设置用于连接支撑横杆,支撑横杆和定位滑杆的设置用于支撑无人机主体,无人机主体在飞行过程中支撑横杆处于收起状态,使得支撑横杆不会阻挡红外摄像头的勘查,通过定位滑杆移动带动支撑横杆移动,通过支撑横杆移动可以调节无人机主体与支撑横杆之间的间距,使得无人机主体在降落时通过支撑横杆可以支撑无人机主体。
24、2、本方案中,通过安装盘与红外摄像头固定连接,可以实现安装盘转动带动红外摄像头转动,从而调节红外摄像头的勘查角度,通过调节两个红外摄像头的勘查角度,可以提高勘查的效率。
技术特征:1.一种勘查无人机,其特征在于,包括:
2.根据权利要求1所述的一种勘查无人机,其特征在于,所述调节机构包括:
3.根据权利要求2所述的一种勘查无人机,其特征在于:每组所述转动部件均包括安装盘(8)和转轴(10),所述转轴(10)转动连接于无人机主体(1)的下内壁,且转轴(10)的一端转动贯穿无人机主体(1)并延伸至无人机主体(1)的下侧,所述安装盘(8)固定连接于转轴(10)的底部。
4.根据权利要求3所述的一种勘查无人机,其特征在于:所述驱动部件包括齿轮(11)和正反转电机(13),所述齿轮(11)设置有两个,每个所述齿轮(11)均固定连接于每个转轴(10)的顶部,两个所述齿轮(11)相互啮合,且两个齿轮(11)均位于无人机主体(1)内侧,所述正反转电机(13)固定连接于横板(12)的顶部,且正反转电机(13)的输出端转动贯穿横板(12)并与其中一个齿轮(11)固定连接。
5.根据权利要求4所述的一种勘查无人机,其特征在于,所述伸缩支撑机构包括:
6.根据权利要求5所述的一种勘查无人机,其特征在于:每组所述支撑部件均包括支撑横杆(4)和定位滑杆(6),所述定位滑杆(6)设置有两个,两个所述定位滑杆(6)均活动插接于无人机主体(1)的下内壁,且两个定位滑杆(6)均活动贯穿无人机主体(1)并延伸至无人机主体(1)的下侧,所述支撑横杆(4)固定连接于两个定位滑杆(6)的底部。
7.根据权利要求6所述的一种勘查无人机,其特征在于:两个所述支撑横杆(4)之间固定连接有两个连接杆(5)对称设置,且两个连接杆(5)对称设置。
8.根据权利要求7所述的一种勘查无人机,其特征在于:所述无人机主体(1)的侧端固定连接有散热板(3)。
技术总结本技术提供一种勘查无人机,属于无人机领域,其由无人机主体、横板、调节机构、红外摄像头、伸缩支撑机构、蓄电池以及信号收发器构成,本方案中通过定位滑杆活动插接于无人机主体上,支撑横杆和定位滑杆的设置用于支撑无人机主体,无人机主体在飞行过程中支撑横杆处于收起状态,使得支撑横杆不会阻挡红外摄像头的勘查,通过定位滑杆移动带动支撑横杆移动,通过支撑横杆移动可以调节无人机主体与支撑横杆之间的间距,使得无人机主体在降落时通过支撑横杆可以支撑无人机主体,可以解决现有技术中的无人机在进行图像采集结束后需要进行降落,由于降落后没有支撑结构,使得在降落时无人机容易出现碰撞损坏,同时会损坏红外摄像头的问题。技术研发人员:张春明,邓蕊,谢文宣受保护的技术使用者:中国人民武装警察部队工程大学技术研发日:20231009技术公布日:2024/4/29本文地址:https://www.jishuxx.com/zhuanli/20240722/219997.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表