地球同步轨道转移交会联合机动参数获取方法及系统
- 国知局
- 2024-08-01 05:30:03
本发明属于航天,涉及一种地球同步轨道转移交会联合机动参数获取方法及系统。
背景技术:
1、地球同步轨道(gso,geosynchronous orbit)分为地球静止轨道(geostationaryorbit,geo)与倾斜地球同步轨道(igso,inclined geosynchronous orbit),其轨道周期与地球自转周期一致,由于其轨道高度较高、视野广阔,广泛用于通信、导航、电视广播和飞行器预警等领域。从地面发射gso卫星时,运载火箭往往将卫星送入远地点与地球同步轨道高度接近,近地点较低的地球同步转移轨道(geosynchronous transfer orbit,gto),由卫星使用自身携带的轨控发动机通过在多圈飞行中执行多次轨道机动逐渐进入gso,任务时间往往长达数天或超过一周。
2、随着在轨服务技术的发展,对高价值gso卫星进行交会服务具有越来越大的商业需求,也是近年国内外地球同步轨道附近新技术试验的重点。已有gso交会任务中,追踪器往往先由运载火箭发射入gto,接着通过多次机动进入gso,再从gso轨道附近出发通过多圈飞行逐渐与gso轨道附近的另一颗目标器进行交会。尽可能缩短轨道交会的时间,对在轨服务与操控等任务具有重要意义。在载人航天领域,快速交会技术在货运飞船、载人飞船甚至空间站实验舱的交会任务中得到多次运用。然而,当前传统的轨道远程交会机动技术对于缩短轨道交会的时间仍然作用不足。
技术实现思路
1、针对上述传统方法中存在的问题,本发明提出了一种地球同步轨道转移交会联合机动参数获取方法和一种地球同步轨道转移交会联合机动参数获取系统,能够有效的缩短轨道交会的时间。
2、为了实现上述目的,本发明实施例采用以下技术方案:
3、一方面,提供一种地球同步轨道转移交会联合机动参数获取方法,包括步骤:
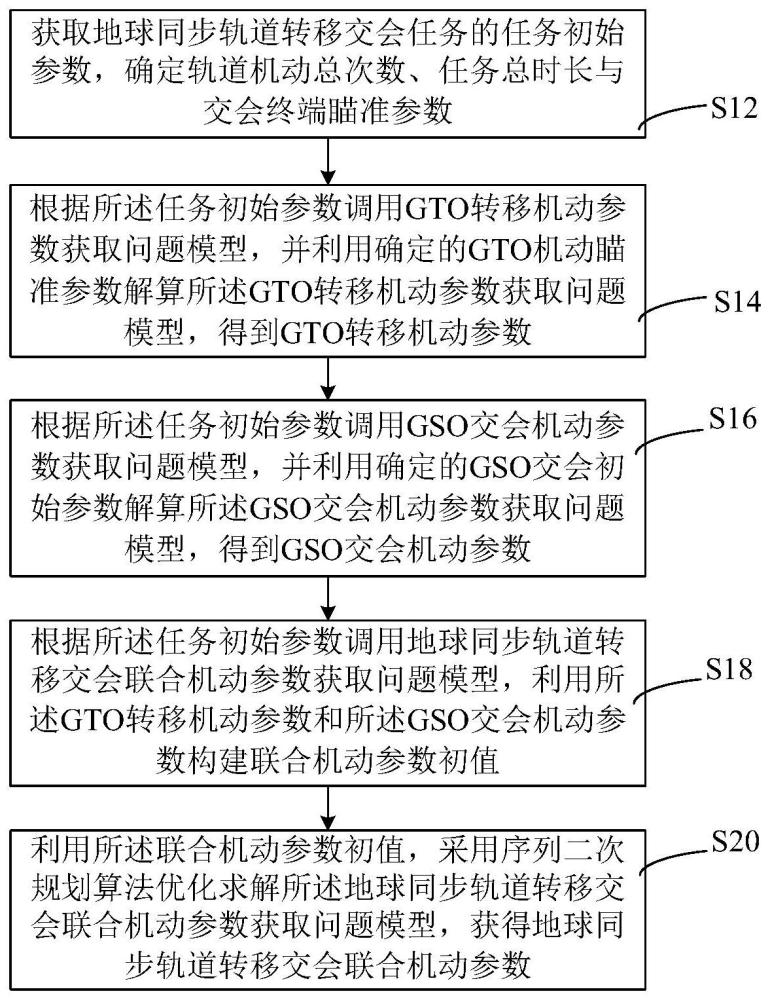
4、获取地球同步轨道转移交会任务的任务初始参数,确定轨道机动总次数、任务总时长与交会终端瞄准参数;任务初始参数包括初始时刻、追踪器与目标器初始轨道要素、追踪器与目标器初始的总质量、轨道机动次数、机动圈次、瞄准参数和收敛标准;
5、根据任务初始参数调用gto转移机动参数获取问题模型,并利用确定的gto机动瞄准参数解算gto转移机动参数获取问题模型,得到gto转移机动参数;
6、根据任务初始参数调用gso交会机动参数获取问题模型,并利用确定的gso交会初始参数解算gso交会机动参数获取问题模型,得到gso交会机动参数;
7、根据任务初始参数调用地球同步轨道转移交会联合机动参数获取问题模型,利用gto转移机动参数和gso交会机动参数构建联合机动参数初值;
8、利用联合机动参数初值,采用序列二次规划算法优化求解地球同步轨道转移交会联合机动参数获取问题模型,获得地球同步轨道转移交会联合机动参数;地球同步轨道转移交会联合机动参数用于控制追踪器与目标器完成地球同步轨道转移交会;其中,
9、gto转移机动参数获取问题模型的第一设计变量包括n-2次机动的圈次以及lvlh坐标系中机动脉冲的迹向与法向分量,gto转移机动参数获取问题模型的目标函数为:
10、
11、其中,n为轨道机动总次数,x1为gto转移机动的设计变量,j=1,2,..,n-2,δvy,j为第j次轨道机动时追踪器在y轴上的速度增量,δvz,j为第j次轨道机动时追踪器在z轴上的速度增量;gto转移机动参数获取问题模型的约束条件包括单次机动大小约束、测控约束与终端约束;
12、gso交会机动参数获取问题模型的第二设计变量包括最后两次机动的机动点平赤经以及lvlh坐标系中机动脉冲的迹向与法向分量,gso交会机动参数获取问题模型的目标函数为:
13、
14、gso交会机动参数获取问题模型的约束条件包括单次机动大小约束与终端约束;
15、地球同步轨道转移交会联合机动参数获取问题模型的设计变量为x=(x1,x2),地球同步轨道转移交会联合机动参数获取问题模型的目标函数为总速度增量最小,地球同步轨道转移交会联合机动参数获取问题模型的约束条件为终端脱靶量不超过收敛标准,x′2=(δvy,n-3,δvy,n-2,δvz,n-3,δvz,n-2,x2)为gso交会机动的设计变量,x2=(λn-1,λn,δvy,n-1,δvyn,δvz,n-1,δvzn)为x′2中与x1没有交叠的部分,λn-1与λn分别为第n-1次与第n次机动点的平赤经。
16、另一方面,还提供一种地球同步轨道转移交会联合机动参数获取系统,包括:
17、初始获取模块,用于获取地球同步轨道转移交会任务的任务初始参数,确定轨道机动总次数、任务总时长与交会终端瞄准参数;任务初始参数包括初始时刻、追踪器与目标器初始轨道要素、追踪器与目标器初始的总质量、轨道机动次数、机动圈次、瞄准参数和收敛标准;
18、gto机动模块,用于根据任务初始参数调用gto转移机动参数获取问题模型,并利用确定的gto机动瞄准参数解算gto转移机动参数获取问题模型,得到gto转移机动参数;
19、gso机动模块,用于根据任务初始参数调用gso交会机动参数获取问题模型,并利用确定的gso交会初始参数解算gso交会机动参数获取问题模型,得到gso交会机动参数;
20、联合初值模块,用于根据任务初始参数调用地球同步轨道转移交会联合机动参数获取问题模型,利用gto转移机动参数和gso交会机动参数构建联合机动参数初值;
21、联合机动模块,用于利用联合机动参数初值,采用序列二次规划算法优化求解地球同步轨道转移交会联合机动参数获取问题模型,获得地球同步轨道转移交会联合机动参数;地球同步轨道转移交会联合机动参数用于控制追踪器与目标器完成地球同步轨道转移交会;其中,
22、gto转移机动参数获取问题模型的第一设计变量包括n-2次机动的圈次以及lvlh坐标系中机动脉冲的迹向与法向分量,gto转移机动参数获取问题模型的目标函数为:
23、
24、其中,n为轨道机动总次数,x1为gto转移机动的设计变量,j=1,2,..,n-2,δvy,j为第j次轨道机动时追踪器在y轴上的速度增量,δvz,j为第j次轨道机动时追踪器在z轴上的速度增量;gto转移机动参数获取问题模型的约束条件包括单次机动大小约束、测控约束与终端约束;
25、gso交会机动参数获取问题模型的第二设计变量包括最后两次机动的机动点平赤经以及lvlh坐标系中机动脉冲的迹向与法向分量,gso交会机动参数获取问题模型的目标函数为:
26、
27、gso交会机动参数获取问题模型的约束条件包括单次机动大小约束与终端约束;
28、地球同步轨道转移交会联合机动参数获取问题模型的设计变量为x=(x1,x2),地球同步轨道转移交会联合机动参数获取问题模型的目标函数为总速度增量最小,地球同步轨道转移交会联合机动参数获取问题模型的约束条件为终端脱靶量不超过收敛标准,x′2=(δvy,n-3,δvy,n-2,δvz,n-3,δvz,n-2,x2)为gso交会机动的设计变量,x2=(λn-1,λn,δvy,n-1,δvyn,δvz,n-1,δvzn)为x′2中与x1没有交叠的部分,λn-1与λn分别为第n-1次与第n次机动点的平赤经。
29、再一方面,还提供一种计算机设备,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述地球同步轨道转移交会联合机动参数获取方法的步骤。
30、又一方面,还一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述的地球同步轨道转移交会联合机动参数获取方法的步骤。
31、上述技术方案中的一个技术方案具有如下优点和有益效果:
32、上述地球同步轨道转移交会联合机动参数获取方法及系统,通过首先获取地球同步轨道转移交会任务的初始时刻、追踪器与目标器初始轨道要素、追踪器与目标器初始的总质量、轨道机动次数、机动圈次、瞄准参数和收敛标准等任务初始参数并确定轨道机动总次数、任务总时长与交会终端瞄准参数后,先后调用预先构建的gto转移机动参数获取问题模型和gso交会机动参数获取问题模型进行求解计算,得到相应的gto转移机动参数和gso交会机动参数,进而调用预先构建的地球同步轨道转移交会联合机动参数获取问题模型并利用gto转移机动参数和gso交会机动参数构建联合机动参数初值,将gto转移机动与gso交会机动联合考虑,再采用序列二次规划算法优化求解地球同步轨道转移交会联合机动参数获取问题模型,获得用于控制追踪器与目标器完成地球同步轨道转移交会的地球同步轨道转移交会联合机动参数,实现依靠追踪器自身推力受限的轨控发动机快速完成与目标器的交会,大大减少了任务总时长,达到更有效地缩短针对gso目标器的在轨服务与操控等轨道交会任务的时间的效果。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220068.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种军用无人机的挂载机构
下一篇
返回列表