一种打捞无人机及协同作业装置的制作方法
- 国知局
- 2024-08-01 05:34:49
本发明涉及无人机打捞设备,特别涉及一种打捞无人机及协同作业装置。
背景技术:
1、随着无人机技术的发展,各行各业都开始利用无人机技术,使得无人机技术的应用越来越广泛。应用于水面物品打捞方面的无人机技术也开始出现。
2、现有无人机在应用于水面物品打捞时,通常需要配置用于配合无人机进行打捞物品的打捞装置以及用于配合无人机进行打捞物品收纳和供人机停靠充电的协同作业装置。
3、授权公告号为cn208070015u的实用新型专利公开了一种用于湖面杂物打捞的无人机,包括无人机本体,所述无人机装载有控制模块、视觉定位模块和机械夹爪:所述视觉定位模块包括视觉传感器和激光定位器;所述控制模块与视觉传感器、机械夹爪相连:所述机械夹爪固定于无人机下端:所述激光定位器为可在照射面上照射预设图案光斑的激光定位器;当无人机工作时在湖面上悬停或跟随操作人员飞行,操作人员以激光定位器照射湖面杂物使杂物表面形成激光光斑,无人机观测到激光光斑后悬停于杂物上方,以机械夹爪抓取湖面杂物并返航。
4、该专利中的无人机虽然能够快速打捞湖面杂物,但仍存在以下缺陷:打捞作业时,机械夹爪夹取一次杂物就必须随无人机返航,需要将杂物卸下后才能到达下一个作业位置进行下一次打捞作业,无法进行不同位置的连续打捞作业,频繁返航不仅大大耗费了无人机的动力能源,而且还大大降低了打捞作业效率。
5、授权公告号cn211810135u的实用新型专利公开了一种水空协作打捞装置,该水空协作打捞装置通过四旋翼无人机和高速智能双体打捞船的组合使用,综合了智能船舶和无人飞行器的优势,具备快速搜索锁定目标物的能力,而且双体船内部携带的机械臂和水下航行器可适应不同的工作环境,有利于系统灵活高效完成打捞或救援作业,为了使得打捞装置具有良好的打捞物搜寻能力,该装置在双体船左右两侧安装的浮箱,浮箱虽然能够在靠时提高双体船的耐波性和抗浪性能,使得双体船不易随波逐流,便于打捞操作的精准进行,但双体船正常航行时,尤其在机动转弯时,浮箱会产生较大的阻力,使得双船体动力成本更高,机动转弯灵活度小。其次,该无人船需在水面不断穿梭于不同目标物之间,作业效率不高且对电能消费较大,不利于长时间作业。
6、因此,我们提出了一种能够实现连续抓取多个不同的目标物,无需无人机频繁返航,既能在船体停靠时提高船体的耐波性和抗浪性能,又能在船体正常航行或转弯时不会对船体产生阻力的无人机以及打捞协同作业装置以解决上述技术问题。
技术实现思路
1、本发明的目的是提供一种打捞无人机及协同作业装置,能够实现连续抓取多个不同的目标物,无需无人机频繁返航,既能在船体停靠时提高船体的耐波性和抗浪性能,又能在船体正常航行或转弯时不会对船体产生阻力,具有打捞效率高,续航时间长,结构简单,操作方便,同步性好,能耗小等优点。
2、本发明的上述技术目的是通过以下技术方案得以实现的:
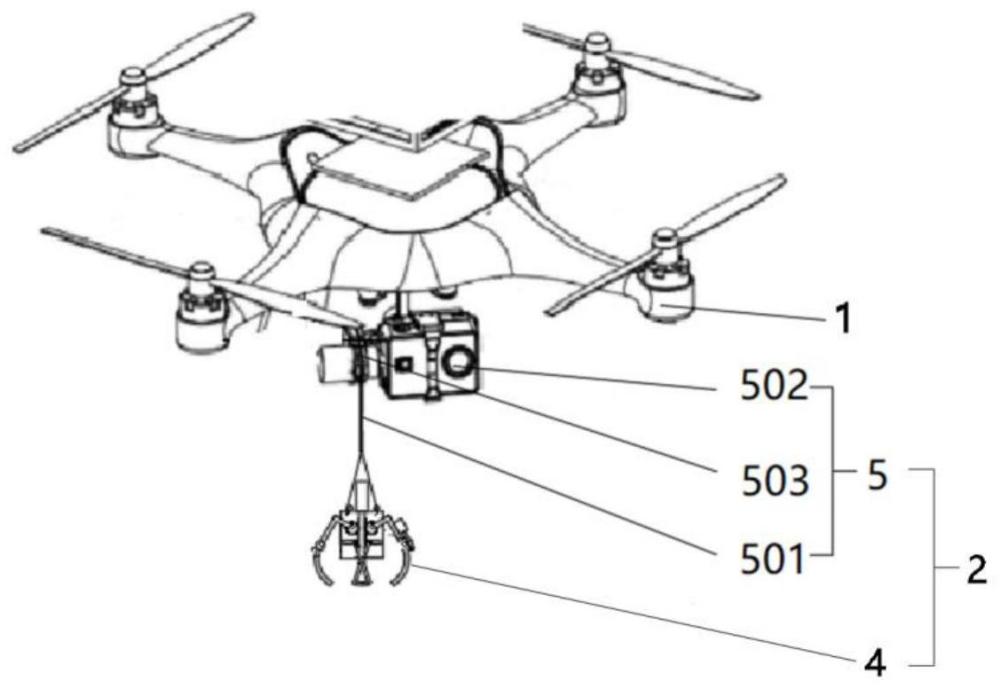
3、一种打捞无人机及协同作业装置,包括无人机、设置在无人机上用于搜寻目标打捞物的摄像机和用于对目标打捞物进行打捞的打捞机构、用于协同无人机进行打捞作业的无人船,所述打捞机构包括可连续抓取的机械爪和用于对机械爪进行高度调节的升降机构,所述升降机构包括钢丝绳和升降电机,所述升降电机固定在无人机底部,所述升降电机的输出轴上固定设有用于卷绕钢丝绳的绕线轮,所述钢丝绳的一端固定在绕线轮上,所述钢丝绳的另一端固定在机械爪上。
4、通过采用上述技术方案,无人船用于协同无人机进行打捞作业,在无人机进入不同作业区域时通过无人船对无人机进行搭载和支撑,不仅有效避免了无人机长时间空载飞行,而且还大大缩短了无人机返航的距离,使得无人机的作业飞行时间得到延长;当无人船行驶到目标区域后,控制无人机在水面飞行并进行目标物搜寻和定位,当摄像机定位到目标物体后,控制无人机悬停在物体上方,然后控制升降机构对机械爪进行高度调节,升降机构对机械爪进行高度调节时通过控制升降电机启动,使得升降电机的输出轴旋转来带动绕线轮旋转,从而不断将卷绕在绕线轮上的钢丝绳释放,使得固定在钢丝绳下端的机械爪下降,此时控制机械爪呈张开状态。当机械爪下降至与目标物体高度相匹配的位置后,控制机械爪合拢,抓住目标物体,然后控制无人机上升,寻找下一个目标物体并重复上述过程,直至机械爪无法再容纳更多的目标物体后控制无人机带动被抓取的目标物体离开水面,飞向船体并控制机械爪张开,使得被抓的目标物全部落入船舱中,整个过程中机械爪可以连续抓取多个不同的目标物,无需无人机频繁返航,大大降低了无人机的能源损耗,使得无人机的续航时间更长,同时,由于减少了返航次数和返航距离,因此大大提高了打捞作业效率。
5、本发明的进一步设置为:所述无人船包括船体,所述船体尾端设有用于驱动船体前进的电动螺旋桨,所述船体上方设有用于无人机停靠的无人机停靠支架,所述船体底部还设有用于平衡水流的水流平衡器,所述水流平衡器与无人机停靠支架通过水流平衡伸缩机构与船体连接。
6、通过采用上述技术方案,无人船利用无人机停靠支架在船体进入不同作业区域时对无人机进行搭载和支撑,避免无人机长时间空载飞行,使得无人机的作业飞行时间得到延长。当船体到达设定作业区域后,会停靠该作业区域的中心位置,然后启动无人机,控制无人机自动搜寻目标打捞物进行打捞作业,由于船体停靠在作业区域的中心位置,因此在同一作业区域完成每次打捞后返回无人船的距离短,使得打捞作业效率高。
7、本发明的进一步设置为:所述水流平衡伸缩机构包括平衡杆和平衡杆固定支架,所述平衡杆固定支架固定在船体上,所述平衡杆的中部与平衡杆固定支架铰接,所述平衡杆的一端通过连杆与无人机停靠支架连接,所述平衡杆的另一端通过伸缩杆与水流平衡器连接。
8、通过采用上述技术方案,水流平衡器由伸缩杆控制伸出或缩回,从而实现落入或离开水面:当无人机停靠在支架上时,无人机的重量落在连杆上,下压连杆,使得平衡杆与连杆连接的一端随连杆向下运动,平衡杆与伸缩杆连接的一端向上运动,平衡杆与伸缩杆连接的一端向上运动时带动带动伸缩杆同步向上运动,伸缩杆向上运动时带动水流平衡器缩回船舱,使得水流平衡器离开水面,从而消除水流平衡作用,使得船体正常航行或转弯时水流平衡器不会对船体产生阻力,便于船体进行移动;当无人机离开无人机停靠支架时,连杆失去压力被松开,伸缩杆在水流平衡器的重力作用下下降,使得水流平衡器落入水里,起到平衡水流的作用,当水波带动船体移动时,阻止船体漂移,大大提高了船体停靠时的耐波性和抗浪性能的,利用无人机的重力来控制水流平衡器伸出或收回船体,结构简单,操作方便,同步性好,能耗小。
9、本发明的进一步设置为:所述船体底部与水流平衡器相对的位置设有向船舱内延伸的水流平衡器容纳腔,所述水流平衡器容纳腔的顶部始终高于水面。
10、通过采用上述技术方案,水流平衡器容纳腔用于容纳水流平衡器,使得水流平衡器能够顺利缩回船舱,避免船舱设置较大开口而导致船舱易进水的问题。
11、本发明的进一步设置为:所述无人机停靠支架固定在船体上,所述连杆与无人机停靠支架纵向滑动配合,所述连杆的上端高于无人机停靠支架的支撑平面,所述连杆的下端与平衡杆的一端铰接,所述伸缩杆与贯穿水流平衡器容纳腔的顶部并与水流平衡器容纳腔的顶部纵向滑动配合,所述伸缩杆的上端与平衡杆的另一端铰接,所述伸缩杆的下端与水流平衡器连接,所述平衡杆固定支架固定在船体上,所述平衡杆的中部与平衡杆固定支架铰接。
12、通过采用上述技术方案,无人机停靠支架用于在无人机停靠时对无人机进行支撑,通过使无人机停靠支架固定在船体上,可以使得无人机停靠时稳定性更好,通过使连杆与无人机停靠支架纵向滑动配合,连杆的上端高于无人机停靠支架的支撑平面,可以使得无人机停靠在无无人机停靠支架上后仅驱动连杆上下运动,无人机停靠支架及其支撑平面高度则始终恒定,无人机的停靠高度始终恒定,连杆上下运动的距离始终恒定,因此保证水流平衡器的伸缩运动路径始终恒定,不受无人机重力变化影响,使得水流平衡器的平衡水流的作用可靠性好。
13、本发明的进一步设置为:所述水流平衡器由平行于船体前进方向和垂直于船体前进方向的两块板组成,两块板呈十字交叉设置,所述水流平衡器的上端与伸缩杆的下端固定连接。
14、通过采用上述技术方案,水流平衡器通过平行于船体前进方向和垂直于船体前进方向的两块板分别对平行于船体前进方向和垂直于船体前进方向的水波进行阻挡,从而可以同时实现船体的横向和纵向漂移,从而阻止船体随波漂移,使得船体停靠时的耐波性和抗浪性能更好。
15、本发明的进一步设置为:所述无人机停靠支架上设有无人机充电桩,所述无人机充电桩包括蓄电池和充电器,所述充电器和电动螺旋桨均与蓄电池连接,所述船体上还设有用于给蓄电池储存电能的太阳能板。
16、通过采用上述技术方案,蓄电池用于给无人和电动螺旋桨供电,一方面为船体前进提供动力,另一方面,当无人机在支架上停靠时,能够及时补充电能,保证无人机在下次作业时具备充足的电能,太阳能板用于吸收太阳能给蓄电池补充电能,使得设备的续航时间更长,不仅成本低,污染小,而且大大降低了因电量不足而返航充电的频率,有效提高了无人机打捞协同作业效率。
17、本发明的进一步设置为:所述机械爪包括与钢丝绳连接的固定板,所述固定板的两侧分别设有相互对称的夹爪一和夹爪二,所述夹爪一和夹爪二的上端分别固定在齿轮一和齿轮二的端面上,所述齿轮一和齿轮二均与固定板转动连接,所述齿轮一和齿轮二均与纵向驱动杆两侧的条形齿啮合,所述纵向驱动杆的上端与驱动气缸一的伸缩轴固定连接,所述纵向驱动杆的下方还分别设有夹爪三和夹爪四,所述夹爪三和夹爪四呈x形交叉设置,所述夹爪三和夹爪四的中部通过转轴与纵向驱动杆下端转动连接,所述夹爪三和夹爪四的上端分别通过滑块一和滑块二与固定板上的横向滑槽滑动配合。
18、通过采用上述技术方案,当机械爪需要张开时,控制驱动气缸一启动,驱动气缸一的伸缩轴伸出并驱动纵向驱动杆向下运动,纵向驱动杆向下运动时带动其两侧的条形齿同步向下运动,两条形齿向下运动时分别驱动齿轮一和齿轮二转动,齿轮一和齿轮二转动时分别带动与其固定连接的夹爪一和夹爪二向相互远离的方向转动,直至夹爪一和夹爪二张开至设定角度,从而为目标物的抓取做准备;当机械爪需要合拢抓取目标物时,控制驱动气缸一启动,驱动气缸一的伸缩轴收缩并驱动纵向驱动杆向上运动,纵向驱动杆向上运动时带动其两侧的条形齿同步向上运动,两条形齿向上运动时分别驱动齿轮一和齿轮二反向转动,齿轮一和齿轮二反向转动时分别带动与其固定连接的夹爪一和夹爪二向相互合拢的方向转动,当夹爪一和夹爪二合拢时就能实现目标物的抓取,机械爪的张开和合拢仅通过驱动气缸一的伸缩就能实现,控制过程,操作方便。
19、纵向驱动杆向下或向上运动驱动夹爪一和夹爪二张开或合拢的同时还能驱动夹爪三和夹爪四合拢或张开,利用夹爪一、夹爪二和夹爪三、夹爪四之间交错合拢和张开,可以实现机械爪的连续抓取,即:当纵向驱动杆向下驱动夹爪一和夹爪二张开时会驱动夹爪三和夹爪四中部的转轴同步向下运动,从而使得夹爪三和夹爪四的上下端分别向相互靠近的方向移动,当夹爪一和夹爪二张开至设定角度时,夹爪三和夹爪四合拢;当纵向驱动杆向上驱动夹爪一和夹爪二合拢时会驱动夹爪三和夹爪四中部的转轴同步向上运动,从而使得夹爪三和夹爪四的上下端分别向相互远离的方向移动,当夹爪一和夹爪二合拢时,夹爪三和夹爪四张开至设定角度;因此,当夹爪一和夹爪二将目标物夹持后(夹爪一和夹爪二合拢)并到达下一个目标物的上方时,控制夹爪一和夹爪二逐渐张开,在夹爪一和夹爪二逐渐张开的同时夹爪三和夹爪四逐渐合拢,因此被夹爪一和夹爪二夹持的目标物会逐渐被夹爪三和夹爪四抓住,当夹爪一和夹爪二再次张开至设定角度时,被夹爪三和夹爪四抓住的目标物不会掉落,此时夹爪一和夹爪二可以再次进行目标物的抓取,当下一个目标物被夹爪一和夹爪二抓住后,夹爪三和夹爪四刚好张开使得上一个目标物落在下一个目标物上,当夹爪一和夹爪二再次张开至设定角度时,上一个目标物和下一个目标物同时被夹爪三和夹爪四抓住,如此,重复上述过程可以实现多个目标物连续的抓取操作,直至夹爪三和夹爪四无法再容纳更多目标物后,停止抓取操作并控制无人机返航。
20、本发明的进一步设置为:所述夹爪一和夹爪二下端的弧形齿爪分别通过转轴一和转轴二与夹爪一和夹爪二的下端转动连接,所述夹爪三和夹爪四下端的弧形齿爪分别与夹爪三和夹爪四固定连接,所述转轴一和转轴二上分别固定设有齿轮三和齿轮四,所述齿轮三和齿轮四分别与夹爪一和夹爪二一侧的齿条一和齿条二啮合,所述齿条一和齿条二分别与固定在夹爪一和夹爪二一侧的驱动气缸二和驱动气缸三的伸缩轴固定连接。
21、通过采用上述技术方案,当夹爪三和夹爪四无法再容纳更多目标物后,控制无人机返航至目的地,此时夹爪一和夹爪二保持合拢状态,夹爪三和夹爪四保持张开状态,当到达目的地时需要将抓取的目标物卸下,此时仅控制驱动气缸二和驱动气缸三的伸缩轴收缩,使得齿轮三和齿轮四旋转至仅夹爪一和夹爪二下方合拢的弧形齿板相互分开,从而使得承载在夹爪一和夹爪二的弧形齿板上的目标物从夹爪一和夹爪二下端的两弧形齿板之间掉出,因此实现了将抓取的目标物卸下。
22、本发明的进一步设置为:所述摄像机、升降电机、驱动气缸一、驱动气缸二和驱动气缸三均与控制器电连接。
23、通过采用上述技术方案,控制器通过接收或发出控制信号来实现摄像机、升降电机、驱动气缸一、驱动气缸二和驱动气缸三的自动控制,使得目标定位、打捞、卸料自动进行,无需人工操作,自动化程度高,人工劳动强度小。
24、本发明的有益效果是:
25、1.本发明利用无人船协同无人机进行打捞作业,在无人机进入不同作业区域时通过无人船对无人机进行搭载和支撑,不仅有效避免了无人机长时间空载飞行,而且还大大缩短了无人机返航的距离,使得无人机的作业飞行时间得到延长;当无人船行驶到目标区域后,控制无人机在水面飞行并进行目标物搜寻和定位,当摄像机定位到目标物体后,控制无人机悬停在物体上方,然后控制升降机构对机械爪进行高度调节,升降机构对机械爪进行高度调节时通过控制升降电机启动,使得升降电机的输出轴旋转来带动绕线轮旋转,从而不断将卷绕在绕线轮上的钢丝绳释放,使得固定在钢丝绳下端的机械爪下降,此时控制机械爪呈张开状态。当机械爪下降至与目标物体高度相匹配的位置后,控制机械爪合拢,抓住目标物体,然后控制无人机上升,寻找下一个目标物体并重复上述过程,直至机械爪无法再容纳更多的目标物体后控制无人机带动被抓取的目标物体离开水面,飞向船体并控制机械爪张开,使得被抓的目标物全部落入船舱中,整个过程中机械爪可以连续抓取多个不同的目标物,无需无人机频繁返航,大大降低了无人机的能源损耗,使得无人机的续航时间更长,同时,由于减少了返航次数和返航距离,因此大大提高了打捞作业效率。
26、2.本发明中无人船利用无人机停靠支架在船体进入不同作业区域时对无人机进行搭载和支撑,避免无人机长时间空载飞行,使得无人机的作业飞行时间得到延长。当船体到达设定作业区域后,会停靠该作业区域的中心位置,然后启动无人机,控制无人机自动搜寻目标打捞物进行打捞作业,由于船体停靠在作业区域的中心位置,因此在同一作业区域完成每次打捞后返回无人船的距离短,使得打捞作业效率高。
27、3.本发明利用无人机停靠或离开无人机停靠支架的过程中通过水流平衡伸缩机构驱动水流平衡器伸出或收回船体,使得水流平衡器在船体停靠时能够自动平衡水流,从而提高船体的耐波性和抗浪性能,在船体正常航行或转弯时自动收缩至船体内,消除水流平衡作用,从而避免对船体产生阻力,结构简单,操作方便。
28、4.本发明中水流平衡器通过平行于船体前进方向和垂直于船体前进方向的两块板分别对平行于船体前进方向和垂直于船体前进方向的水波进行阻挡,从而可以同时实现船体的横向和纵向漂移,从而阻止船体随波漂移,使得船体停靠时的耐波性和抗浪性能更好。
29、5.本发明中机械爪通过纵向驱动杆向下或向上运动驱动夹爪一和夹爪二张开或合拢的同时还驱动夹爪三和夹爪四合拢或张开,并且利用夹爪一、夹爪二和夹爪三、夹爪四之间交错合拢和张开来实现机械爪的连续抓取,使得机械转可以连续抓取多个不同的目标物,无需无人机频繁返航,大大降低了无人机的能源损耗,使得无人机的续航时间更长,同时,由于减少了返航次数,大大提高了打捞作业效率。
30、6.本发明中控制器通过接收或发出控制信号来实现摄像机、升降电机、驱动气缸一、驱动气缸二和驱动气缸三的自动控制,使得目标定位、打捞、卸料自动进行,无需人工操作,自动化程度高,人工劳动强度小。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220508.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表