一种飞鸟机械仿生联动结构的制作方法
- 国知局
- 2024-08-01 05:35:30
本技术涉及一种展演道具结构,特别涉及一种真人机械操控仿生道具结构。
背景技术:
1、现有城市空间展示区中仿生展演道具受到观众喜爱,但是现阶段的仿生展演道具缺少由操作人员控制同步进行仿生运动,与展演受众互动性差。
技术实现思路
1、本实用新型的目的旨在至少解决技术缺陷之一。
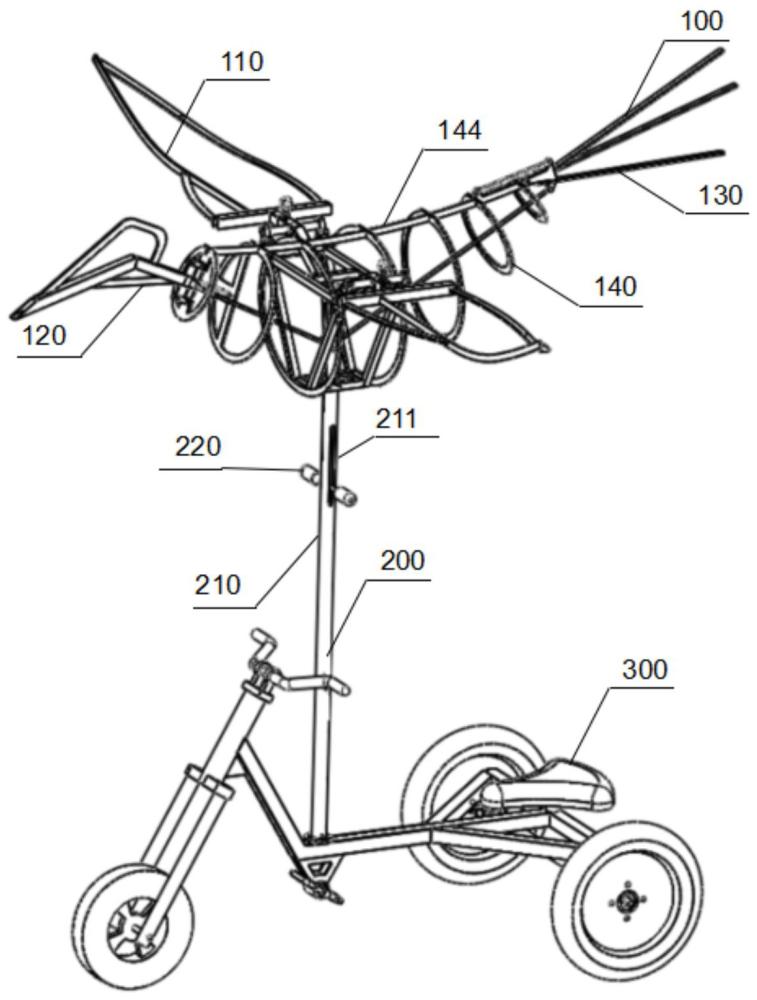
2、为此,本实用新型的目的在于提出一种飞鸟机械仿生联动结构,包括飞鸟装置、连杆装置、底盘装置;
3、连杆装置,包括中空的立杆、握柄、第一连杆、托板;
4、立杆底部固定于底盘装置中部上方;
5、立杆的中上部设有限位槽;
6、握柄中部横杆贯通限位槽;
7、托板固定于立杆顶部;
8、第一连杆套入立杆内,该第一连杆下端固定于握柄中部,上端穿出托板;
9、飞鸟装置,包括展翅联动机构、头部联动机构、尾部联动机构、躯体骨架;
10、躯体骨架为由两端向中部渐大的五个以上由脊条固定的圆环组成,该骨架在展翅联动机构中部设有腹部支撑环;
11、腹部支撑环底部固定于托板;
12、展翅联动机构,包括扣件、第二连杆、曲连杆、第一光轴、翅展骨架;
13、第一连杆顶部固定于扣件中部;
14、二个第二连杆镂空底部内侧分别插接于扣件两侧的二个限位螺丝,该第二连杆镂空上部内侧分别插接于曲连杆下端限位螺丝,曲连杆两端分别以各自对应的限位螺丝为轴心配合连接的扣件、曲连杆进行多连杆运动;
15、第一光轴末端固定于腹部支撑环的斜支撑杆,该光轴作为转轴插入曲连杆;
16、翅展骨架末端插入曲连杆末端,插接处插入定位销固定。
17、在展翅联动机构运行过程中,当操作人员下拉握柄至限位槽下端的过程中,第一连杆、第二连杆、曲连杆同步联动,且曲连杆以第一光轴为轴心进行弧形运动,翅展骨架同步向上进行弧形运动;当操作人员不施与握柄下拉力量时,翅展骨架受重力影响向下进行弧形运动,并带动曲连杆、第二连杆、第一连杆、握柄同步联动,直至握柄运动至限位槽上端为止,如此往复,实现展翅联动机构进行仿生扇动翅膀运动。
18、进一步的,头部联动机构包括头部骨架、第二光轴、第一弹簧、第一钢丝绳;
19、躯体骨架在靠近头部骨架一侧分别设有头部支撑环、胸部支撑环;
20、头部支撑环上下两端设有二个卡扣,第二光轴两端固定于该二个卡扣;
21、头部骨架末端嵌套于所述第二光轴中部且固定于所述头部支撑环中部,以所述第二光轴为轴进行弧形运动;
22、第一弹簧、第一钢丝绳分置于头部骨架的后部两侧;
23、第一弹簧的两端分别固定于头部支撑环、胸部支撑环;
24、第一钢丝绳的两端分别固定于头部支撑环、扣件。
25、在头部联动机构运行过程中,当操作人员下拉握柄至限位槽下端的过程中,第一连杆向下运动,带动固定于扣件的第一钢丝绳同步下拉牵引,带动头部支撑环向第一钢丝绳一侧倾斜,头部骨架以第二光轴为轴心向同一侧进行弧形运动,第一弹簧同步伸长;当操作人员不施与握柄下拉力量时,第一弹簧收缩,头部支撑环向第一弹簧一侧运动,带动头部骨架以第二光轴为轴心向同一侧进行弧形运动,第一钢丝绳向上拉伸,带动第一连杆向上运动直至握柄到达限位槽上端为止,如此往复,实现头部联动机构进行仿生转动头部运动。
26、进一步的,尾部联动机构包括l型件、t型件、尾部骨架、第二弹簧、第二钢丝绳;
27、l型件固定于脊条末端;
28、t型件与l型件由限位螺丝连接,t型件以限位螺丝为轴进行弧形运动;
29、第二弹簧两端分别固定于l型件、t型件端部;
30、第二钢丝绳两端分别固定于t型件端部、扣件中部;
31、尾部骨架固定于t型件后部。
32、在尾部联动机构运行过程中,当操作人员下拉握柄至限位槽下端的过程中,第一连杆向下运动,带动固定于扣件的第二钢丝绳同步下拉牵引,带动t型件及固定于t型件的尾部骨架向下运动,第二弹簧同步伸长;当操作人员不施与握柄下拉力量时,第二弹簧收缩,带动t型件及固定于t型件的尾部骨架向上运动,第二钢丝绳向上拉伸,带动第一连杆向上运动直至握柄到达限位槽上端为止,如此往复,实现尾部联动机构进行仿生转动尾部运动。
33、进一步的,底盘装置为三轮车。
34、本实用新型的有益效果为:当进行展演过程中,飞鸟装置包裹造型外皮,操作人员在下拉握柄过程中,第一连杆带动头部联动机构、展翅联动机构、尾部联动机构运动;当操作人员不施与握柄下拉力的过程中,翅展骨架受重力影响向下运动,带动第一连杆向上运动,头部联动机构、尾部联动机构反向运动,如此往复,实现多部位仿生运动,从而吸引受众驻足观看。
技术特征:1.一种飞鸟机械仿生联动结构,其特征在于:包括飞鸟装置(100)、连杆装置(200)、底盘装置(300);
2.按照权利要求1所述的飞鸟机械仿生联动结构,其特征在于:所述头部联动机构(120)包括头部骨架(121)、第二光轴(122)、第一弹簧(123)、第一钢丝绳(124);
3.按照权利要求1或2所述的飞鸟机械仿生联动结构,其特征在于:所述尾部联动机构(130)包括l型件(131)、t型件(132)、尾部骨架(133)、第二弹簧(134)、第二钢丝绳(135);
4.按照权利要求3所述的飞鸟机械仿生联动结构,其特征在于:所述底盘装置(300)为三轮车。
技术总结一种飞鸟机械仿生联动结构,包括飞鸟装置、连杆装置、底盘装置;连杆装置,包括中空的立杆、握柄、第一连杆、托板;飞鸟装置,包括展翅联动机构、头部联动机构、尾部联动机构、躯体骨架;展翅联动机构,包括扣件、第二连杆、曲连杆、第一光轴、翅展骨架;头部联动机构包括头部骨架、第二光轴、第一弹簧、第一钢丝绳;尾部联动机构包括L型件、T型件、尾部骨架、第二弹簧、第二钢丝绳。本技术握柄下拉过程中,第一连杆带动头部联动机构、展翅联动机构、尾部联动机构运动;当操作人员不施与握柄下拉力的过程中,翅展骨架受重力影响向下运动,带动第一连杆向上运动,头部联动机构、尾部联动机构反向运动,如此往复,实现多部位仿生运动。技术研发人员:郝明显,陈文祥,崔朋受保护的技术使用者:天津市路道科技有限公司技术研发日:20230615技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240722/220577.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表