一种高通过性的四轮星球车及其工作方法
- 国知局
- 2024-08-01 05:37:21
本发明涉及星球车,更具体地说,涉及一种高通过性的四轮星球车及其工作方法。
背景技术:
1、随着深空行星探测研究不断深入,对执行探测任务的星球车可探测范围和效率的要求不断提高,这就意味着提高星球车在大沉陷松软沙地、崎岖石块等复杂且恶劣行星表面地形上的通过性、机动性和脱困能力成为新型星球车的发展方向和潜在要求。因此,轮式星球车作为目前星表探测的主要平台和重要载体,其移动系统的相关构型和理论的创新攻关变得十分关键。
2、目前常规使用的星球车悬架构型多为通过车身差速器连接的六轮摇臂-转向架结构,可被动适应地形起伏,适合低速行驶。但在新阶段行星探测任务的要求下,其驱动的冗余性,无法控制车身姿态,行驶移动方式单一,脱困能力差等问题愈发显著。相比而言,四轮星球车的协调运动控制较简单,无复杂悬架姿态变化,更加适合行星表面复杂地形上的高速行驶。同时,其可改造性更高,便于开展多移动模式的结构设计。
3、因此,如何设计新型四轮星球车移动系统结构,使其具备良好的通过性、机动性和脱困能力,并针对各类行驶地形进行行驶模式和状态的调整,成为本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提出了一种高通过性的四轮星球车及其工作方法,该构型方案适用于行星表面复杂且恶劣的地形分布下的探测任务,具备良好的机动性、通过性和脱困能力;同时,该四轮星球车工作方法中多种移动模式的使用,可完成极端地形如大沉陷松软沙地、崎岖石块等条件下的探测任务,增大星表可探测范围和效率。
2、为了实现上述目的,本发明采用的如下技术方案:
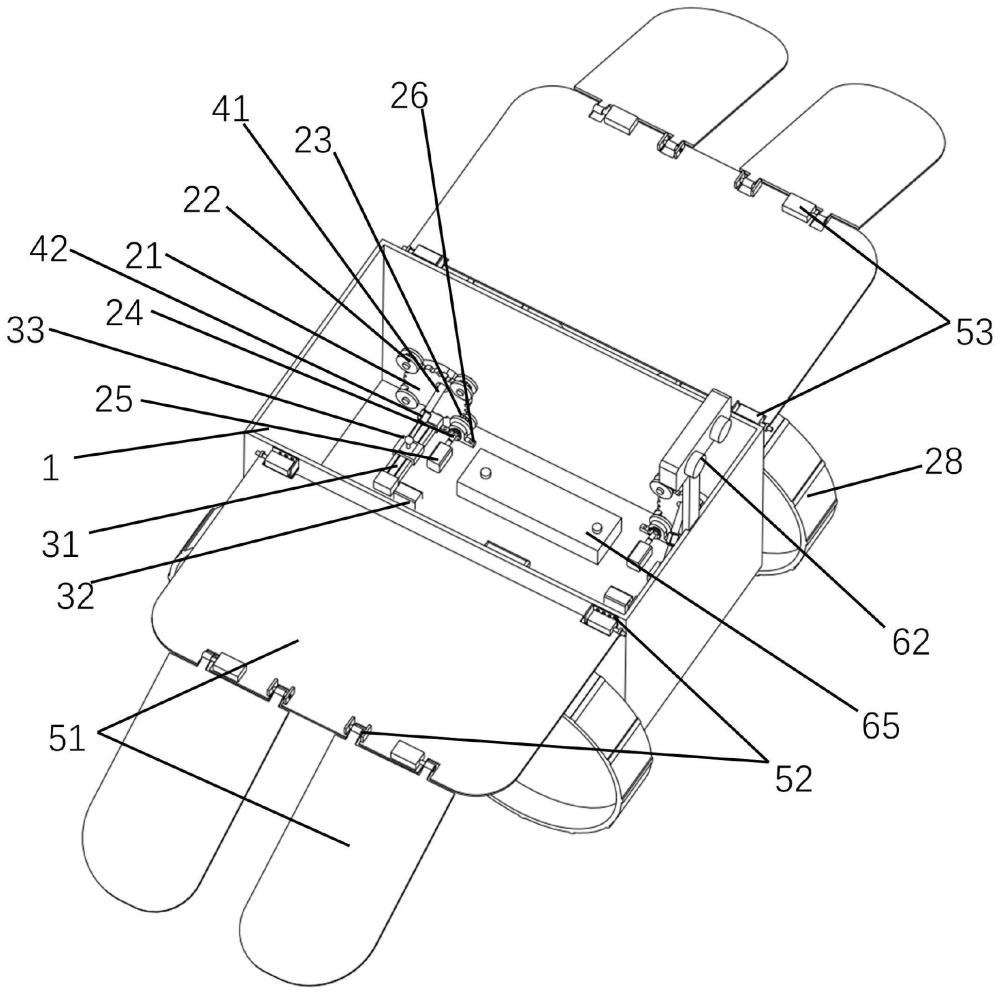
3、一种高通过性的四轮星球车,包括:
4、车体;
5、车轮及驱动机构,包括四组且对称安装在所述车体四角处的侧壁上,单组所述车轮及驱动机构对应安装于车体侧壁的内外两侧;
6、轮内伸杆移动机构,与四组所述车轮及驱动机构一一对应,安装在所述车体内部且位于对应所述车轮及驱动机构的内侧;
7、伸杆机构,与四组所述轮内伸杆移动机构一一对应,安装在对应所述轮内伸杆移动机构上并伸出车轮外;
8、防侧倾太阳翼机构,安装在所述车体安装有车轮的对应两侧上边缘;
9、测控系统,安装在所述车体上。
10、本发明通过轮内伸杆移动机构控制伸杆机构伸出星球车车轮状态,并在测控系统控制和防侧倾太阳翼机构的保护下,通过前端仿生掌足机构辅助四轮星球车通过大沉陷松软沙地、崎岖石块等多种恶劣星球表面地形,有效提高了四轮星球车的通过性、机动性和应急脱困能力,增大了星表可探测范围和效率。
11、优选地,每组所述车轮及驱动机构均对应包括主转盘、固定盘、驱动盘、驱动电机、挡板以及所述车轮;所述主转盘正对车体侧壁上预留的通孔一,且所述主转盘外侧面上垂直固连的主转盘轴伸出所述车体外;所述固定盘和所述驱动盘排列在所述主转盘四周;所述主转盘、所述固定盘、所述驱动盘的外缘均有齿,且相邻盘相互啮合转动;与所述固定盘转动连接的固定盘转轴固定在车体内壁上,所述驱动盘由安装在所述车体内的驱动电机驱动转动;所述挡板安装于车体外侧壁的所述通孔一处,所述主转盘轴穿过挡板中心通孔,且所述主转盘轴的外端连接所述车轮;所述主转盘、所述挡板、所述车轮上均留有供所述伸杆机构伸出所述车轮外的通孔二。
12、优选地,所述驱动盘以及每一所述固定盘均对应将主转盘外缘夹持于中间。
13、优选地,所述驱动盘位于所述主转盘一角靠近车体底部位置,驱动盘轴穿过固定在所述车体内底部的带座轴承,并与一电机盘相固连,所述电机盘远离所述驱动盘轴的一侧安装电机盘轴,所述电机盘轴与所述驱动电机的驱动电机输出轴相固连。
14、优选地,每一所述轮内伸杆移动机构均对应包括滑台、滑台电机、伸杆球头座;所述滑台安装在所述车体内底部及对应所述车轮及驱动机构内侧,并与所述主转盘相垂直;所述滑台电机安装在所述滑台上,并带动滑台滑块移动;所述伸杆球头座安装在所述滑台滑块上,且所述伸杆球头座的球头座方向朝向所述主转盘。
15、优选地,每一所述伸杆机构均对应包括伸杆杆体、伸杆转动电机、前端仿生掌足机构、前端调整电机;所述伸杆杆体包括杆体一、杆体二,所述杆体一的尾端为适配安装在所述伸杆球头座内的杆体球头;所述伸杆转动电机安装在所述杆体一、所述杆体二之间,且其输出轴连接到外段的所述杆体二上,并带动所述杆体二转动;所述杆体二穿过所述主转盘、所述车体、所述挡板、所述车轮,并伸出所述车轮外;所述前端仿生掌足机构安装在所述杆体二的最外端,并且所述前端仿生掌足机构上还安装有用以调整其姿态的前端调整电机。
16、优选地,所述防侧倾太阳翼机构包括防侧倾太阳翼、铰接部件、太阳翼电机;所述防侧倾太阳翼为多节太阳翼,其通过所述铰接部件安装到车体侧壁上边缘上;所述太阳翼电机安装于所述防侧倾太阳翼上并带动多节太阳翼实现折叠、展开和角度变化;所述防侧倾太阳翼通过调整其多节太阳翼的角度,能够使其最外端碰触到星球表面凸起的石块或在车身角度倾斜的状况下碰触到星球表面。
17、优选地,所述测控系统包括控制器、桅杆相机、激光测距仪、陀螺仪、电源;所述控制器、所述陀螺仪、所述电源均安装在所述车体内部;所述桅杆相机安装在所述车体前部侧壁上方,将星球车前方地形信息传输至所述控制器;所述激光测距仪安装在所述车体外侧面中线的底部,将车体底部距行星表面的距离传输至所述控制器。
18、一种高通过性的四轮星球车的工作方法,应用于上述一种高通过性的四轮星球车上,四轮星球车通过测控系统采集地形和自身信息并分析后,控制轮内伸杆移动机构移动,带动伸杆机构伸出星球车车轮外侧并跟随车轮旋转,并在旋转过程中调整伸杆机构旋转角度;在车身倾斜角度过大的特殊形况下,通过调整防侧倾太阳翼机构的姿态进行应急保护;四轮星球车在测控系统协调控制和防侧倾太阳翼机构的保护下,通过前端仿生掌足机构触碰行星表面进行土壤拨动或者支撑车体,辅助四轮星球车通过恶劣星球表面地形或进行自身脱困。
19、与现有技术相比,本发明一种高通过性的四轮星球车及其工作方法的有益效果是:
20、本发明通过在车身内部安装可伸出车体外侧的伸杆机构,并配合前端仿生掌足机构可在某些特殊地形环境或者行驶状态下,辅助或代替车轮与行星表面产生力作用,实现整车移动。通过防侧倾太阳翼机构,在特殊情况下对整车进行应急的保护。相对于现有的技术而言,本发明为现有的四轮星球车上增加了一种新式的移动方式及具体机构,有效避免了四轮星球车行驶移动方式单一,脱困能力差、通过性差等问题,通过测控系统控制和多种移动方式切换,可更好的完成新型或特殊的探测任务。
技术特征:1.一种高通过性的四轮星球车,其特征在于,包括:
2.根据权利要求1所述的一种高通过性的四轮星球车,其特征在于,每组所述车轮及驱动机构均对应包括主转盘、固定盘、驱动盘、驱动电机、挡板以及所述车轮;所述主转盘正对车体侧壁上预留的通孔一,且所述主转盘外侧面上垂直固连的主转盘轴伸出所述车体外;所述固定盘和所述驱动盘排列在所述主转盘四周;所述主转盘、所述固定盘、所述驱动盘的外缘均有齿,且相邻盘相互啮合转动;与所述固定盘转动连接的固定盘转轴固定在车体内壁上,所述驱动盘由安装在所述车体内的驱动电机驱动转动;所述挡板安装于车体外侧壁的所述通孔一处,所述主转盘轴穿过挡板中心通孔,且所述主转盘轴的外端连接所述车轮;所述主转盘、所述挡板、所述车轮上均留有供所述伸杆机构伸出所述车轮外的通孔二。
3.根据权利要求2所述的一种高通过性的四轮星球车,其特征在于,所述驱动盘以及每一所述固定盘均对应将主转盘外缘夹持于中间。
4.根据权利要求2或3所述的一种高通过性的四轮星球车,其特征在于,所述驱动盘位于所述主转盘一角靠近车体底部位置,驱动盘轴穿过固定在所述车体内底部的带座轴承,并与一电机盘相固连,所述电机盘远离所述驱动盘轴的一侧安装电机盘轴,所述电机盘轴与所述驱动电机的驱动电机输出轴相固连。
5.根据权利要求1所述的一种高通过性的四轮星球车,其特征在于,每一所述轮内伸杆移动机构均对应包括滑台、滑台电机、伸杆球头座;所述滑台安装在所述车体内底部及对应所述车轮及驱动机构内侧,并与所述主转盘相垂直;所述滑台电机安装在所述滑台上,并带动滑台滑块移动;所述伸杆球头座安装在所述滑台滑块上,且所述伸杆球头座的球头座方向朝向所述主转盘。
6.根据权利要求5所述的一种高通过性的四轮星球车,其特征在于,每一所述伸杆机构均对应包括伸杆杆体、伸杆转动电机、前端仿生掌足机构、前端调整电机;所述伸杆杆体包括杆体一、杆体二,所述杆体一的尾端为适配安装在所述伸杆球头座内的杆体球头;所述伸杆转动电机安装在所述杆体一、所述杆体二之间,且其输出轴连接到外段的所述杆体二上,并带动所述杆体二转动;所述杆体二穿过所述主转盘、所述车体、所述挡板、所述车轮,并伸出所述车轮外;所述前端仿生掌足机构安装在所述杆体二的最外端,并且所述前端仿生掌足机构上还安装有用以调整其姿态的前端调整电机。
7.根据权利要求1所述的一种高通过性的四轮星球车,其特征在于,所述防侧倾太阳翼机构包括防侧倾太阳翼、铰接部件、太阳翼电机;所述防侧倾太阳翼为多节太阳翼,其通过所述铰接部件安装到车体侧壁上边缘上;所述太阳翼电机安装于所述防侧倾太阳翼上并带动多节太阳翼实现折叠、展开和角度变化;所述防侧倾太阳翼通过调整其多节太阳翼的角度,能够使其最外端碰触到星球表面凸起的石块或在车身角度倾斜的状况下碰触到星球表面。
8.根据权利要求1所述的一种高通过性的四轮星球车,其特征在于,所述测控系统包括控制器、桅杆相机、激光测距仪、陀螺仪、电源;所述控制器、所述陀螺仪、所述电源均安装在所述车体内部;所述桅杆相机安装在所述车体前部侧壁上方,将星球车前方地形信息传输至所述控制器;所述激光测距仪安装在所述车体外侧面中线的底部,将车体底部距行星表面的距离传输至所述控制器。
9.一种高通过性的四轮星球车的工作方法,应用于权利要求1-8任一项所述的一种高通过性的四轮星球车上,其特征在于,四轮星球车通过测控系统采集地形和自身信息并分析后,控制轮内伸杆移动机构移动,带动伸杆机构伸出星球车车轮外侧并跟随车轮旋转,并在旋转过程中调整伸杆机构旋转角度;在车身倾斜角度过大的特殊形况下,通过调整防侧倾太阳翼机构的姿态进行应急保护;四轮星球车在测控系统协调控制和防侧倾太阳翼机构的保护下,通过前端仿生掌足机构触碰行星表面进行土壤拨动或者支撑车体,辅助四轮星球车通过恶劣星球表面地形或进行自身脱困。
技术总结本发明涉及星球车技术领域,公开了一种高通过性的四轮星球车及其工作方法,该高通过性的四轮星球车包括车体、车轮及驱动机构、轮内伸杆移动机构、伸杆机构、防侧倾太阳翼机构和测控系统;车轮及驱动机构包括四组且对称安装在车体四角处的侧壁上;轮内伸杆移动机构安装在车体内部且位于对应车轮及驱动机构的内侧;伸杆机构安装在对应轮内伸杆移动机构上并伸出车轮外;防侧倾太阳翼机构,安装在车体安装有车轮的对应两侧上边缘。本发明适用于行星表面复杂且恶劣的地形分布下的探测任务,具备良好的机动性、通过性和脱困能力;同时,可完成极端地形如大沉陷松软沙地、崎岖石块等条件下的探测任务,增大星表可探测范围和效率。技术研发人员:金敬福,贾志成,董新桔,陈廷坤,贺连彬,齐迎春,于庆宇,邹猛受保护的技术使用者:吉林大学技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240722/220681.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表