一种基于数据统计的轨道控制效果评估方法与流程
- 国知局
- 2024-08-01 05:37:14
本发明属于卫星轨道控制技术及统计分析领域,涉及一种使用于低轨卫星基于数据统计的轨道控制效果评估方法。
背景技术:
1、轨控策略和轨控参数计算的正确性和可行性在轨道控制中十分重要,每次完成轨控后需要根据实测卫星轨道根数对本次轨控效果评估,以验证算法正确性并进行校正。
2、对于轨道控制,在进行轨控策略和轨控参数计算时应基于平根数计算,因此应基于平根数进行轨道控制效果评估。传统的平根数生成方法,通过对轨道摄动力进行分解,分解出短周期摄动项、长周期摄动项和长期摄动项,舍弃短周期摄动项,从而获得轨道平根数。这种方法需要较深的轨道理论基础以及高等数学基础,不便于理解。
技术实现思路
1、本发明为了解决背景技术中的问题提供了一种基于数据统计的轨道控制效果评估方法,适用于低轨卫星,该方法通过对瞬时轨道外推数据进行统计分析,辅以基础性的卫星摄动分析公式得到轨道平根数,计算理论控制平根数和实际控制平根数进行相对误差计算实现轨控效果评估。
2、本发明采用的技术方案如下:
3、一种基于数据统计的轨道控制效果评估方法,适用于低轨卫星,包括以下过程:
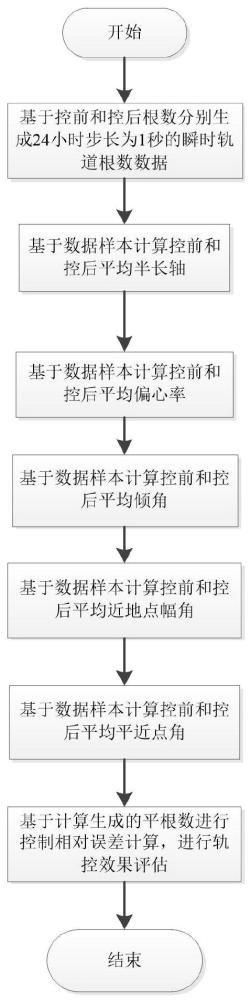
4、通过瞬时轨道外推算法,基于控前和控后根数分别生成设定时间段内设定步长的瞬时轨道根数数据样本,并通过数据样本计算轨道周期;
5、基于数据样本计算控前和控后平均半长轴;
6、基于数据样本计算控前和控后平均偏心率;
7、基于数据样本计算控前和控后平均倾角;
8、基于数据样本计算控前和控后平均升交点赤经;
9、基于数据样本计算控前和控后平均近地点幅角;
10、基于数据样本计算控前和控后平均平近点角;
11、基于计算生成的平根数进行控制相对误差计算。
12、进一步的,通过数据样本计算轨道周期具体过程为:
13、s1,使用第一个数据样本计算轨道周期tp0;
14、s2,在数据样本中取前tp0个数据计算平均半长轴,并基于平均半长轴再次计算轨道周期tp1;
15、s3,如果tp0和tp1误差小于1秒,则以tp1为最终计算得到的轨道周期tp,否则令tp0=tp1,返回s2。
16、进一步的,基于数据样本计算控前和控后平均半长轴具体过程为:
17、一个周期tp时间内平均半长轴值为中心时刻[tp/2]的半长轴均值,计算公式为:
18、
19、其他时间的平均半长轴值通过半长轴衰减率进行计算,具体为:取前tp个数据的半长轴平均值记为取最后tp个数据的半长轴平均值记为则半长轴变化率计算公式为:
20、
21、则计算时刻的平均半长轴值计算公式为:
22、
23、式中,[]表示向下取整,为一个周期tp时间内平均半长轴值,aj为j时刻的半长轴,m为数据样本个数,t为计算时刻相对初始中心时刻的时间偏差。
24、进一步的,基于数据样本计算控前和控后平均偏心率具体过程为:
25、一个周期tp时间内偏心率的平均值即作为整个轨道的偏心率平均值计算公式为:
26、
27、式中,ej为j时刻的偏心率。
28、进一步的,基于数据样本计算控前和控后平均倾角具体过程为:
29、一个周期tp时间内倾角的平均值为中心时刻[tp/2]的倾角均值,计算公式为:
30、
31、其他时间倾角的平均值通过倾角衰减率进行计算,具体为:取前tp个数据的倾角平均值记为取最后tp个数据的倾角平均值记为则倾角变化率i计算公式为:
32、
33、则计算时刻倾角的平均值计算公式为:
34、
35、式中,[]表示向下取整,为一个周期tp时间内倾角的平均值,ij为j时刻的倾角,t为计算时刻相对初始中心时刻的时间偏差,m为数据样本个数。
36、进一步的,基于数据样本计算控前和控后平均升交点赤经具体过程为:
37、对所有数据进行线性化处理:当第ni点与ci点的升交点赤经差值超过180度时,对ni及以后的所有升交点赤经均加360度;当第ni点与ci点的升交点赤经差值超过-180度时,对ni及以后的所有升交点赤经均减360度;其中ni=ci+1;
38、一个周期tp时间内升交点赤经的平均值为中心时刻[tp/2]的升交点赤经均值,计算公式为:
39、
40、
41、式中,ωj为经过线性化处理后的升交点赤经,fmod表示取余,[]表示向下取整,为一个周期tp时间内升交点赤经的平均值;如果得到的小于0,则加上360;
42、其他时间的升交点赤经平均值具体计算为:取前tp个数据的真实升交点赤经平均值记为取最后tp个数据的真实升交点赤经平均值记为则升交点赤经变化率计算公式为:
43、
44、则计算时刻的升交点赤经平均值计算公式为:
45、
46、式中,t为计算时刻相对初始中心时刻的时间偏差,m为数据样本个数。
47、进一步的,基于数据样本计算控前和控后平均近地点幅角具体过程为:
48、对所有数据进行线性化处理:当第l点与l-1点的近地点幅角差值超过180度时,对l及以后的所有近地点幅角均加360度;当第l点与l-1点的近地点幅角差值超过-180度时,对l及以后的所有近地点幅角均减360度;
49、一个周期tp时间内近地点幅角的平均值为中心时刻[tp/2]的近地点幅角均值,计算公式为:
50、
51、
52、式中,ωj是经过线性化处理后的近地点幅角,fmod表示取余,[]表示向下取整,为一个周期tp时间内近地点幅角的平均值;如果得到的小于0,则加上360;
53、其他时间的近地点幅角平均值具体计算为:取前tp个数据的真实近地点幅角平均值记为取最后tp个数据的真实近地点幅角平均值记为则近地点幅角变化率计算公式为:
54、
55、则计算时刻的近地点幅角平均值计算公式为:
56、
57、式中,t为计算时刻相对初始中心时刻的时间偏差,m为数据样本个数。
58、进一步的,基于数据样本计算控前和控后平均平近点角具体过程为:
59、对所有数据进行线性化处理:当第l点与l-1点的平近点角差值超过180度时,对l及以后的所有平近点角均加360度;当第l点与l-1点的平近点角差值超过-180度时,对l及以后的所有平近点角均减360度;
60、一个周期tp时间内平近点角的平均值为中心时刻[tp/2]的平近点角均值,计算公式为:
61、
62、
63、式中,mj是经过线性化处理后的平近点角,fmod表示取余,[]表示向下取整,为一个周期tp时间内平近点角的平均值,如果得到的小于0,则加上360;
64、其他时间的平近点角平均值具体计算为:取前tp个数据的真实平近点角平均值记为取最后tp个数据的真实平近点角平均值记为则平近点角变化率计算公式为:
65、
66、则计算时刻的平近点角平均值计算公式为:
67、
68、式中,t为计算时刻相对初始中心时刻的时间偏差,m为数据样本个数。
69、进一步的,基于计算生成的平根数进行控制相对误差计算具体过程为:
70、根据控制要求和控制类型获得理论控制量,根据控前和控后的平根数计算平均相对误差进行轨控效果评估,其中平根数中的近地点幅角和平近点角的相对误差使用纬度幅角进行表示,相对误差计算公式为:
71、
72、式中,xt为理论控制量,xa为实际控制量,纬度辐角近似为平近点角和近地点辐角之和,ci为平根数每个值的误差所占权重,根据控制类型进行分配。
73、本发明相比现有技术的有益效果为:
74、本发明基于数据统计的轨道控制效果评估方法能实现在不建立复杂物理模型基础上实现客观准确的快速轨控效果评估。
75、本发明基于数据统计的轨道控制效果评估方法不需要建立和分析复杂的物理模型,仅通过数值处理和统计便可以计算得到平根数,结合本发明的相对误差计算方法进行效果评估,计算简单,可操作性强,评估客观准确。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220670.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表