一种仿昆虫翅膀拍动的三自由度机构及实验系统
- 国知局
- 2024-08-01 05:37:02
本发明涉及微小型飞行器,具体涉及一种仿昆虫翅膀拍动的三自由度机构及实验系统。
背景技术:
1、体型较小的昆虫在飞行时翅膀的拍动方式更为复杂,采用三个自由度以类似字母“u”的轨迹前后和上下挥舞拍动。对于极小昆虫的非定常高升力机制研究目前主要是基于运动学观察数据进行计算流体动力学(cfd)数值模拟。
2、对于极小昆虫的气动力特性以及流场结构的研究,都是通过数值计算方法来进行,目前的研究机构主要都是二自由度机构,然而极小昆虫翅膀采用三自由度拍动模式,因此,有必要设计出能够实现三自由度拍动的机构。
技术实现思路
1、本发明要解决的技术问题是提供一种仿昆虫翅膀拍动的三自由度机构,能够仿极小昆虫拍动的三自由度机构,实现翅膀俯仰运动、抬升运动和拍动运动。
2、为解决上述问题,本发明采用如下技术方案:
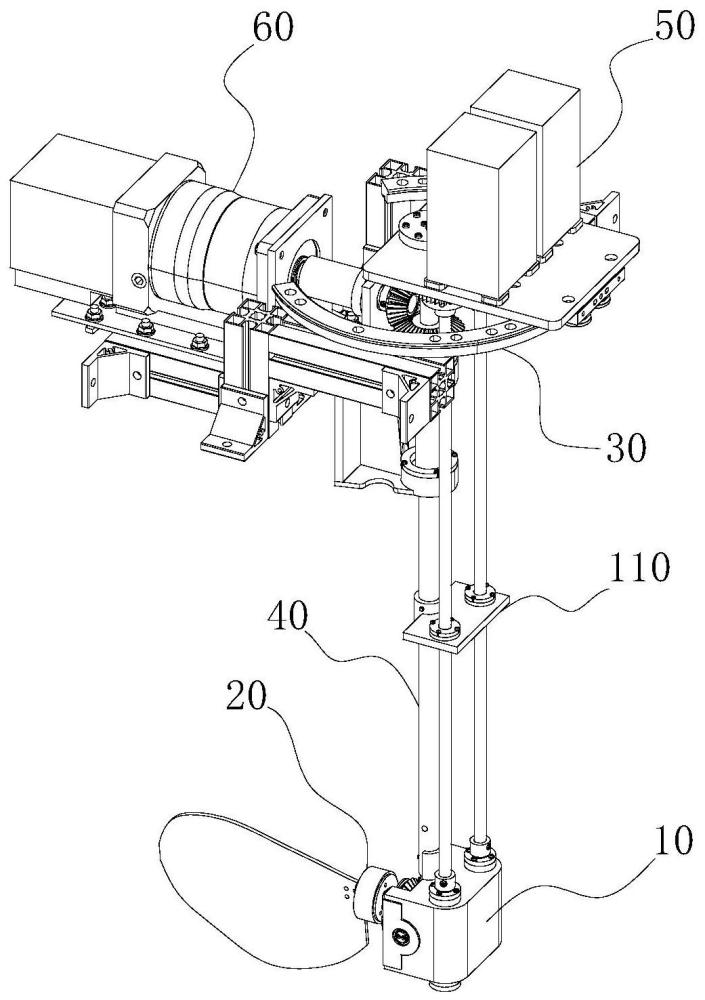
3、第一方面,本发明提供一种仿昆虫翅膀拍动的三自由度机构,包括差分齿轮传动组件、仿昆虫翅膀组件、承载组件、主轴组件、第一驱动组件和第二驱动组件。
4、所述仿昆虫翅膀组件配置为与所述差分齿轮传动组件的输出端连接。
5、所述主轴组件末端配置为与所述差分齿轮传动组件固定连接。
6、所述第一驱动组件配置为与所述差分齿轮传动组件联接,所述第一驱动组件用于控制所述仿昆虫翅膀组件的俯仰角和抬升角。
7、所述第二驱动组件配置为与所述主轴组件联接,所述第二驱动组件用于驱动所述主轴组件转动,以控制所述仿昆虫翅膀组件的拍动角。
8、所述第一驱动组件可周向移动地搭载在所述承载组件上,且所述第一驱动组件还被配置为与所述主轴组件的顶端联接,以使所述主轴组件带动所述第一驱动组件周向运动。
9、本公开至少一实施例提供的仿昆虫翅膀拍动的三自由度机构中,所述差分齿轮传动组件包含有第一蜗轮蜗杆机构、第二蜗轮蜗杆机构和差分齿轮机构。
10、所述差分齿轮机构具有两个输入端和一个输出端。
11、所述第一蜗轮蜗杆机构和第二蜗轮蜗杆机构分别与所述差分齿轮机构的两个输入端连接。
12、所述仿昆虫翅膀组件配置为与所述差分齿轮机构的输出端固定连接。
13、本公开至少一实施例提供的仿昆虫翅膀拍动的三自由度机构中,所述第一驱动组件包含有第一伺服电机、第二伺服电机和第一连接座。
14、所述第一连接座具有第一转轴和第二转轴。
15、所述第一转轴和第二转轴分别与所述第一蜗轮蜗杆机构和第二蜗轮蜗杆机构连轴。
16、所述第一转轴和第二转轴均与所述第一连接座转动连接。
17、所述第一转轴与所述第一伺服电机的输出轴齿轮联动。
18、所述第二转轴与所述第二伺服电机的输出轴齿轮联动。
19、所述第一伺服电机和第二伺服电机均固定地配置在所述第一连接座上。
20、本公开至少一实施例提供的仿昆虫翅膀拍动的三自由度机构中,所述承载组件包含有弧形导轨,所述第一连接座上设置有导向轮,所述第一连接座通过所述导向轮与所述弧形导轨滑动连接。
21、本公开至少一实施例提供的仿昆虫翅膀拍动的三自由度机构中,所述仿昆虫翅膀组件包含有测力天平和翅膀模型。
22、所述测力天平固定地配置在所述差分齿轮机构的输出端。
23、所述翅膀模型固定地配置在所述测力天平上。
24、本公开至少一实施例提供的仿昆虫翅膀拍动的三自由度机构中,所述第二驱动组件包含有第三伺服电机和第二连接座。
25、所述第二连接座配置为与所述主轴组件转动连接。
26、所述第三伺服电机固定地配置在所述第二连接座上。
27、所述第三伺服电机的输出轴与所述主轴组件齿轮联动。
28、本公开至少一实施例提供的仿昆虫翅膀拍动的三自由度机构中,还包括保持架。
29、所述主轴组件、第一转轴和第二转轴均与保持架转动连接。
30、所述保持架位于所述承载组件和差分齿轮传动组件之间。
31、本公开至少一实施例提供的仿昆虫翅膀拍动的三自由度机构中,还包括机架。
32、所述承载组件和第二连接座均与所述机架固定连接。
33、本公开至少一实施例提供的仿昆虫翅膀拍动的三自由度机构中,还包括有色液供给组件。
34、所述有色液供给组件用于为翅膀模型输送有色液。
35、所述翅膀模型内设置有流道,所述流道配置为与所述有色液供给组件连接。
36、所述翅膀模型的边缘具有渗出孔,所述渗出孔与所述流道连通,以使有色液能从所述翅膀模型的边缘渗出。
37、第二方面,本发明还提供一种实验系统,包括高速cmos相机、激光器、同步器、控制器、三棱镜和实验水箱,还包括上述的仿昆虫翅膀拍动的三自由度机构。
38、本发明的有益效果为:能够仿极小昆虫拍动的三自由度机构,通过差分齿轮实现翅膀俯仰和抬升运动,再通过主轴的转动实现翅膀的拍动运动,其结构及控制方法简单。
技术特征:1.一种仿昆虫翅膀拍动的三自由度机构,其特征在于,包括:
2.根据权利要求1所述的一种仿昆虫翅膀拍动的三自由度机构,其特征在于,所述差分齿轮传动组件包含有:
3.根据权利要求2所述的一种仿昆虫翅膀拍动的三自由度机构,其特征在于,所述第一驱动组件包含有:
4.根据权利要求3所述的一种仿昆虫翅膀拍动的三自由度机构,其特征在于,所述承载组件包含有弧形导轨,所述第一连接座上设置有导向轮,所述第一连接座通过所述导向轮与所述弧形导轨滑动连接。
5.根据权利要求4所述的一种仿昆虫翅膀拍动的三自由度机构,其特征在于,所述仿昆虫翅膀组件包含有:
6.根据权利要求5所述的一种仿昆虫翅膀拍动的三自由度机构,其特征在于,所述第二驱动组件包含有:
7.根据权利要求3所述的一种仿昆虫翅膀拍动的三自由度机构,其特征在于,还包括保持架;
8.根据权利要求6所述的一种仿昆虫翅膀拍动的三自由度机构,其特征在于,还包括机架;
9.根据权利要求6所述的一种仿昆虫翅膀拍动的三自由度机构,其特征在于,还包括:
10.一种实验系统,包括高速cmos相机、激光器、同步器、控制器、三棱镜和实验水箱,其特征在于,还包括如权利要求10中所述的仿昆虫翅膀拍动的三自由度机构。
技术总结本发明涉及微小型飞行器技术领域,具体公开一种仿昆虫翅膀拍动的三自由度机构,包括差分齿轮传动组件、仿昆虫翅膀组件、承载组件、主轴组件、第一驱动组件和第二驱动组件;仿昆虫翅膀组件配置为与差分齿轮传动组件的输出端连接;主轴组件末端配置为与差分齿轮传动组件固定连接;第一驱动组件配置为与差分齿轮传动组件联接,第一驱动组件用于控制仿昆虫翅膀组件的俯仰角和抬升角;第二驱动组件配置为与主轴组件联接,第二驱动组件用于驱动主轴组件转动;第一驱动组件可周向移动地搭载在承载组件上,主轴组件能带动第一驱动组件周向运动;该仿昆虫翅膀拍动的三自由度机构能够仿极小昆虫拍动,实现翅膀俯仰运动、抬升运动和拍动运动。技术研发人员:白宏磊,何皓翔,付嘉钧受保护的技术使用者:中山大学技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240722/220656.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。