针对多种复杂效应的高速转捩多面体试验模型及试验方法与流程
- 国知局
- 2024-08-01 05:37:02
本发明属于高速转捩地面试验,具体涉及一种针对多种复杂效应的高速转捩多面体试验模型及试验方法。
背景技术:
1、湍流和转捩是影响飞行器流场环境的主要因素之一,也是一直困扰着工程界以及科学界的基本流体力学问题之一。高速飞行器边界层转捩后形成湍流会使得摩擦阻力及气动加热成倍增加,进而影响飞行器气动力及气动热特性。因此,在飞行器设计中必须要考虑边界层转捩问题。由于边界层转捩受飞行器外形、来流条件、物面粗糙度等众多因素影响,转捩过程复杂,准确预测转捩现象一直都是高速流场预测的重点与难点。
2、目前,转捩预测模型中的经验关联公式是基于低速风洞试验数据发展而来,然后基于平板、尖锥等简单外形,对该转捩预测模型进行改进和修正,使得该转捩预测模型适用于高速流动转捩模拟。但修正后的转捩预测模型在高速复杂外形流场中的应用验证还存在欠缺,平板转捩预测模型无法模拟横流效应,尖锥转捩预测模型只考虑了横流效应,没有考虑表面粗糙度、真实烧蚀表面等影响。因此,设计一种考虑多种复杂效应的高速转捩地面试验模型及试验方法,依据试验数据实现对高速转捩预测模型的验证,对于支撑高速飞行器复杂飞行环境下转捩精确预测具有重要意义。
技术实现思路
1、针对现有技术中转捩地面试验面对复杂因素的模拟能力局限性较强的技术问题,本发明提出了一种考虑多种复杂效应的高速转捩多面体地面试验模型及试验方法,可基于一个试验模型同时开展不同头部钝度、不同壁面粗糙度、真实烧蚀形貌等的转捩地面试验,实现对考虑多种复杂效应转捩预测模型的全面有效验证,进而为高速飞行器复杂飞行环境下转捩精确预测提供可靠手段。
2、本发明解决上述技术问题采用的技术方案如下:
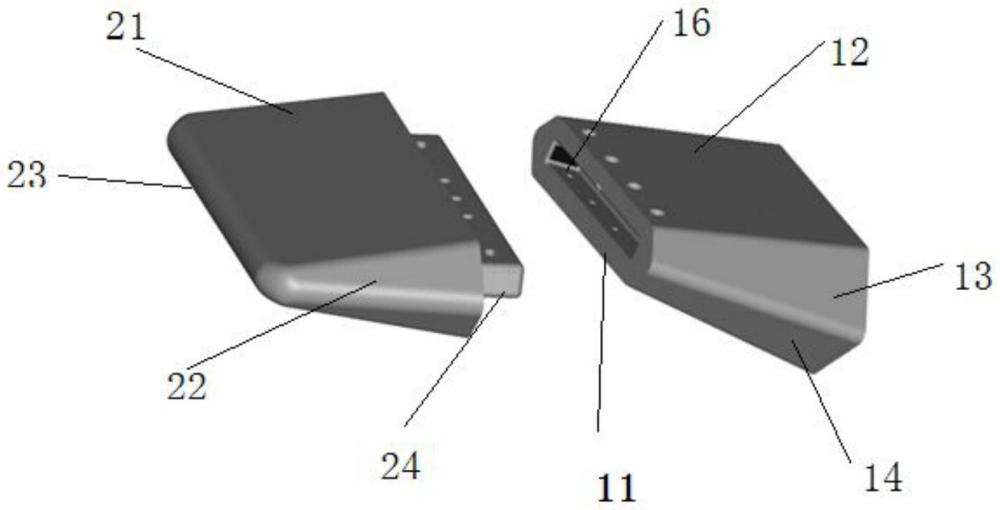
3、本发明提供了一种针对多种复杂效应的高速转捩多面体试验模型,所述多面体试验模型采用上下、左右对称构型,包括主体以及和主体插接的可变头部;
4、所述主体包括前平面、后平面、上平面、下平面以及四个斜平面;所述前、后平面竖直设置,所述前平面上设置用于对接的凹腔,所述后平面竖直方向长度大于所述前平面竖直方向长度;所述上、下平面分别位于前、后平面上侧、下侧,与所述前平面、后平面形成一定角度的夹角;所述上、下平面的两侧边缘分别通过两个斜平面连接,每一侧的两个斜平面向外凸出、形成一定角度的夹角;
5、所述可变头部包括上表面、下表面、连接面以及两个不规则侧面;所述上表面、下表面的前边缘按一定角度相交形成头部,头部采用倒圆处理,远离头部的一侧为连接面,所述连接面上设置用于对接的凸键,所述不规则侧面由上下两个三角形斜面向外突出组成;
6、所述主体与所述可变头部对接后,所述可变头部上、下表面与所述主体上、下平面分别位于同一平面且光滑过渡,所述可变头部的每一个不规则侧面与同侧主体的两个斜平面对应位于同一平面且光滑过渡。
7、进一步地,所述主体上平面设置用于安装烧蚀样件的凹槽。
8、进一步地,所述头部倒圆半径不大于20mm。
9、进一步地,所述可变头部上、下表面的夹角不小于20°。
10、进一步地,所述主体的斜平面与相邻上平面或下平面的夹角小于155°。
11、进一步地,所述可变头部长度为多面体试验模型长度的10~15%;所述凹槽中心到头部顶点的距离为多面体试验模型长度的20~25%。
12、本发明还提供了一种针对多种复杂效应的高速转捩多面体试验模型试验方法,包括如下步骤:
13、s1、构建多面体试验模型;
14、设计多面体试验模型可变头部采用不同的的钝度,所述钝度为头部倒圆半径;
15、设计多面体试验模型可变头部采用不同的壁面粗糙度;
16、在多面体试验模型主体上表面设计用于装配烧蚀样件的凹槽;
17、s2、针对不同头部钝度、不同头部壁面粗糙度、有无烧蚀样件的多面体试验模型开展仿真计算,获得不同状态下多面体试验模型的表面热流、压力分布以及转捩型面、转捩位置;
18、s3、根据多面体试验模型表面热流、压力分布以及转捩型面、转捩位置,明确测量方式、测量设备的选型、测量设备在多面体试验模型表面的布局。
19、进一步地,所述步骤s2具体包括如下步骤:
20、针对不同头部钝度的光滑壁面的多面体试验模型以及包含烧蚀样件的多面体试验模型,构建各个多面体试验模型的仿真计算网格;
21、以各个多面体试验模型的仿真计算网格为输入,将不同头部壁面粗糙度转换为等效沙粒高度,按照地面试验状态,分别采用层流、湍流、转捩开展仿真计算,获得各种状态下的多面体试验模型表面热流、压力分布以及转捩型面、转捩位置;
22、评估不同头部钝度、不同壁面粗糙度下转捩位置变化规律。
23、进一步地,所述仿真计算网格采用分区对接结构网格,所述仿真计算网格的近壁网格正交性满足70~90°,所述仿真计算网格的第一层网格间距为多面体试验模型长度的1e-5量级。
24、进一步地,所述测量方式包括采用传感器进行点测量,采用磷光热图进行面测量;
25、所述测量设备为传感器,所述传感器的选型包括明确传感器的尺寸、量程、频响指标;
26、所述传感器在转捩位置变化范围内的布设密度大于其他位置的布设密度;所述传感器关于中垂面左右对称布置。
27、进一步地,所述传感器包括薄膜铂电阻、脉动压力传感器,分别用于测量多面体试验模型壁面温度、壁面压力。
28、进一步地,所述可变头部的半径分别设计为5mm、10mm、15mm、20mm。
29、进一步地,所述可变头部的壁面粗糙度分别设计为0μm、100μm、200μm、400μm。
30、本发明与现有技术相比的有益效果:
31、1.本发明设计了高速多面体构型试验模型,相比当前转捩地面试验大多采用的平板、椭锥等简单构型,该多面体试验构型兼顾了当前高速升力体飞行器典型头部构型特征,且多面体构型的转捩发生机制也不同于平板、椭锥等简单构型,地面试验中获得的一些新规律、新现象一方面可以支撑高速转捩领域后续基础研究,另一方面可为高速飞行器转捩应用提供指导。
32、2.本发明在现有技术开展的单一因素转捩地面试验研究的基础上,形成了考虑多种复杂效应的高速转捩地面试验方案,涉及到的多种复杂效应均为实际工程中典型场景,在一批次地面试验中可系统研究多种复杂效应对高速转捩的影响规律,获取的试验数据可为考虑复杂效应的转捩预测方法验证提供有力支撑。
技术特征:1.一种针对多种复杂效应的高速转捩多面体试验模型,其特征在于,所述多面体试验模型采用上下、左右对称构型,包括主体以及和主体插接的可变头部;
2.根据权利要求1所述的高速转捩多面体试验模型,其特征在于,所述主体上平面设置用于安装烧蚀样件的凹槽。
3.根据权利要求2所述的高速转捩多面体试验模型,其特征在于,所述头部倒圆半径不大于20mm;所述可变头部上、下表面的夹角不小于20°;所述主体的斜平面与相邻上平面或下平面的夹角小于155°;所述可变头部长度为多面体试验模型长度的10~15%;所述凹槽中心到头部顶点的距离为多面体试验模型长度的20~25%。
4.一种针对多种复杂效应的高速转捩多面体试验模型试验方法,其特征在于,包括如下步骤:
5.根据权利要求4所述的试验方法,其特征在于,所述步骤s2具体包括如下步骤:
6.根据权利要求5所述的试验方法,其特征在于,所述仿真计算网格采用分区对接结构网格,所述仿真计算网格的近壁网格正交性满足70~90°,所述仿真计算网格的第一层网格间距为多面体试验模型长度的1e-5量级。
7.根据权利要求6所述的试验方法,其特征在于,所述测量方式包括采用传感器进行点测量和采用磷光热图进行面测量;
8.根据权利要求7所述的试验方法,其特征在于,所述传感器包括薄膜铂电阻、脉动压力传感器,分别用于测量多面体试验模型壁面温度、壁面压力。
9.根据权利要求4所述的试验方法,其特征在于,所述可变头部的半径分别设计为5mm、10mm、15mm、20mm。
10.根据权利要求4所述的试验方法,其特征在于,所述可变头部的壁面粗糙度分别设计为0μm、100μm、200μm、400μm。
技术总结本发明提供了一种针对多种复杂效应的高速转捩多面体试验模型及试验方法,该多面体试验模型采用上下、左右对称构型,包括主体和可变头部;主体包括前后平面、上下平面以及四个斜平面,前、后平面竖直设置,前平面设置凹腔,上、下平面分别位于前、后平面上侧、下侧,上、下平面的两侧边缘分别通过两个斜平面连接;可变头部包括上下表面、连接面以及两个不规则侧面,上、下表面的前边缘按一定角度相交形成头部,头部采用倒圆处理,远离头部的一侧为连接面,连接面上设置凸键,不规则侧面由上下两个三角形斜面向外突出组成;主体与可变头部对接后表面平滑过渡。本发明可用于实现考虑多种复杂效应转捩预测模型的全面有效验证。技术研发人员:庄剑,全栋梁,刘松,杜斌,王慧杰受保护的技术使用者:中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院)技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240722/220655.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。