基于磁-气浮轴承的空间可展开机构地面模拟系统
- 国知局
- 2024-08-01 05:37:09
本发明涉及一种基于磁-气浮轴承的空间可展开机构地面模拟系统,属于空间地面模拟系统领域。
背景技术:
1、考虑发射空间限制、发射成本等因素,太阳能帆板、大尺度太空天线等大型空间结构均采用空间可展开机构,在地面发射阶段处于收拢装调,发射入轨后在空间进行展开,形成最终的结构形式。由此,空间可展开机构的展开性能将直接影响航天发射任务,在地面阶段需要做大量的试验验证,保证型号任务万无一失。目前,空间可展开机构地面模拟系统包括基于桁架导轨悬吊模拟系统和基于零重力气球的悬吊模拟系统。其中,基于桁架导轨的悬吊模拟系统采用多套二维桁架导轨对空间可展开机构的不同部件进行悬吊,空间可展开机构展开过程中,由于随动桁架结构质量较大,需要克服较大的额外惯性,无法保证与空间展开过程的保真性,且由于多个随动桁架结构之间存在结构干涉,空间可展开机构的展开路线受到限制;基于零重力气球的悬吊模拟系统需要克服气球运动中受到的空气阻尼,无法较好完成空间可展开机构地面模拟任务。因此,面向空间可展开机构展开过程地面模拟任务,目前尚无较优的方案。
2、磁-气浮轴承结合气悬浮技术和磁力吸附技术的优势,可实现对所悬吊物体平面无阻尼随动,然而,受单个磁-气浮轴承的最大磁力限制,并考虑安全等因素,无法对大型结构进行悬吊。此外,单纯增大磁铁结构或采用电磁铁等方式增大磁-气浮轴承的磁力,在磁性运动平台拼接处会发生强磁材料感生磁场的耦合,导致拼接处磁场对磁-气浮轴承产生明显的斥力,无法实现大范围内内无阻尼移动的效果。
技术实现思路
1、针对基于磁-气浮轴承的悬吊模拟系统磁力受限的问题,本发明提供一种基于磁-气浮轴承的空间可展开机构地面模拟系统。
2、本发明的一种基于磁-气浮轴承的空间可展开机构地面模拟系统,包括基于磁-气浮轴承的悬吊模块、空间可展开机构和n个磁性运动平台模块;
3、空间可展开机构包括连接在一起的多个悬吊部件,基于磁-气浮轴承的悬吊模块与悬吊部件等数量,每个悬吊部件连接一个基于磁-气浮轴承的悬吊模块;
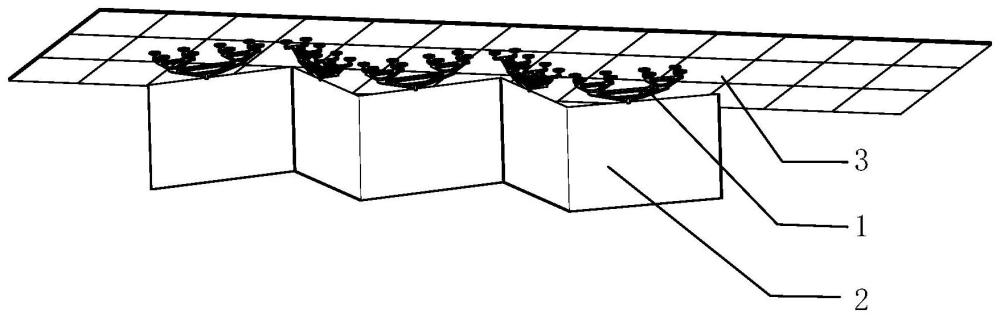
4、将n个磁性运动平台模块拼接在一起,组成运动平台,固定在工作场景的顶端;n的值由空间可展开机构的运动范围确定;基于磁-气浮轴承的悬吊模块倒置吸附在运动平台的工作面上,基于磁-气浮轴承的悬吊模块在所述工作面上进行无阻尼移动。
5、作为优选,基于磁-气浮轴承的悬吊模块包括m个磁-气浮轴承和多个连接单元,多个连接单元进行连接,形成倒三角型的多级连接单元,m个磁-气浮轴承与一级连接单元连接,末级连接单元与一个悬吊部件连接,m个磁-气浮轴承的工作面位于同一平面,m的值和连接单元的数量由悬吊部件的重量确定。
6、作为优选,基于磁-气浮轴承的悬吊模块包括磁-气浮轴承、一级连接单元、二级连接单元和三级连接单元;
7、每个一级连接单元的顶端连接一个磁-气浮轴承,每个一级连接单元的底端与一个二级连接单元上表面的一个连接端连接,每个二级连接单元下表面的连接端与一个三级连接单元上表面的一个连接端连接,三级连接单元下表面的连接端与一个悬吊部件连接。
8、作为优选,连接单元与连接单元间采用铰链连接,末级连接单元与悬吊部件刚性连接。
9、作为优选,磁-气浮轴承包括连接杆、盖板、充气孔、气浮板和强磁结构;
10、连接杆的一端固定在一级连接单元的顶端,连接杆的另一端为球铰通过盖板固定在气浮板上;充气孔固定在气浮板上,用于给气浮板内部气腔供气;强磁结构由按照环状海尔贝克阵列结构布置的多块不同磁极方向的磁铁构成,强磁结构内嵌在气浮板的工作面上,气浮板的工作面上设置有节流孔,气浮板的工作面吸附在运动平台的工作面上。
11、作为优选,磁-气浮轴承额定磁力为60n时,气浮板的直径为120mm;磁铁横截面为直径25mm的扇面,厚度6mm的n52等级的钕铁硼材料,强磁结构与运动平台的工作面间距离为10mm。
12、作为优选,磁-气浮轴承额定磁力为60n时,气浮板的直径为120mm;磁铁横截面为直径20mm的扇面,厚度5mm的n42等级的钕铁硼材料,强磁结构与运动平台的工作面间距离为2mm。
13、作为优选,通过充气孔给气浮板内部气腔提供0.4~0.8mpa的高压气源。
14、作为优选,磁性运动平台模块包括框架结构和磁性运动平面;
15、框架结构作为主体承力结构,一端与工作场景的顶端连接,另一端与磁性运动平面连接,框架结构上设置有连接部,用于与其他磁性运动平台模块的框架结构进行拼接,所述框架结构具备平面调整功能。
16、作为优选,所述磁性运动平面采用5mm厚度的冷轧铸铁板。
17、本发明的有益效果,本发明可在地面实现空间可展开机构展开全过程;且相比于传统基于桁架导轨的悬吊模拟方案,具备额外附加惯量小、运动轨迹无限制、保真度高等优点;本发明为面向磁-气浮轴承的多级串联的连接结构,通过将多个磁-气浮轴承并联组合的方式提高单个吊点的最大拉力,解决了受单个磁-气浮轴承可提供最大磁拉力限制的问题,同时,避免在运动平台交界处感生斥力对运动的影响。
技术特征:1.基于磁-气浮轴承的空间可展开机构地面模拟系统,其特征在于,所述模拟系统包括基于磁-气浮轴承的悬吊模块、空间可展开机构和n个磁性运动平台模块;
2.根据权利要求1所述的基于磁-气浮轴承的空间可展开机构地面模拟系统,其特征在于,基于磁-气浮轴承的悬吊模块包括m个磁-气浮轴承和多个连接单元,多个连接单元进行连接,形成倒三角型的多级连接单元,m个磁-气浮轴承与一级连接单元连接,末级连接单元与一个悬吊部件连接,m个磁-气浮轴承的工作面位于同一平面,m的值和连接单元的数量由悬吊部件的重量确定。
3.根据权利要求2所述的基于磁-气浮轴承的空间可展开机构地面模拟系统,其特征在于,基于磁-气浮轴承的悬吊模块包括磁-气浮轴承、一级连接单元、二级连接单元和三级连接单元;
4.根据权利要求1或3所述的基于磁-气浮轴承的空间可展开机构地面模拟系统,其特征在于,连接单元与连接单元间采用铰链连接,末级连接单元与悬吊部件刚性连接。
5.根据权利要求1所述的基于磁-气浮轴承的空间可展开机构地面模拟系统,其特征在于,所述磁-气浮轴承包括连接杆、盖板、充气孔、气浮板和强磁结构;
6.根据权利要求5所述的基于磁-气浮轴承的空间可展开机构地面模拟系统,其特征在于,磁-气浮轴承额定磁力为60n时,气浮板的直径为120mm;磁铁横截面为直径25mm的扇面,厚度6mm的n52等级的钕铁硼材料,强磁结构与运动平台的工作面间距离为10mm。
7.根据权利要求5所述的基于磁-气浮轴承的空间可展开机构地面模拟系统,其特征在于,磁-气浮轴承额定磁力为60n时,气浮板的直径为120mm;磁铁横截面为直径20mm的扇面,厚度5mm的n42等级的钕铁硼材料,强磁结构与运动平台的工作面间距离为2mm。
8.根据权利要求6或7所述的基于磁-气浮轴承的空间可展开机构地面模拟系统,其特征在于,通过充气孔给气浮板内部气腔提供0.4~0.8mpa的高压气源。
9.根据权利要求1所述的基于磁-气浮轴承的空间可展开机构地面模拟系统,其特征在于,磁性运动平台模块包括框架结构和磁性运动平面;
10.根据权利要求9所述的基于磁-气浮轴承的空间可展开机构地面模拟系统,其特征在于,所述磁性运动平面采用5mm厚度的冷轧铸铁板。
技术总结基于磁‑气浮轴承的空间可展开机构地面模拟系统,解决了基于磁‑气浮轴承的悬吊模拟系统磁力受限的问题,属于空间地面模拟系统领域。本发明包括基于磁‑气浮轴承的悬吊模块、空间可展开机构和n个磁性运动平台模块;空间可展开机构包括连接在一起的多个悬吊部件,基于磁‑气浮轴承的悬吊模块与悬吊部件等数量,每个悬吊部件连接一个基于磁‑气浮轴承的悬吊模块;将n个磁性运动平台模块拼接在一起,组成运动平台,固定在工作场景的顶端;n的值由空间可展开机构的运动范围确定;基于磁‑气浮轴承的悬吊模块倒置吸附在运动平台的工作面上,从而基于磁‑气浮轴承的悬吊模块在所述工作面上进行无阻尼移动。技术研发人员:杜德嵩,齐乃明,霍明英,于泽,赵博程,刘延芳,齐骥,贺龙,范子琛受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240722/220665.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表