基于流体推力矢量的飞行控制方法、装置及控制设备
- 国知局
- 2024-08-01 05:35:10
本发明涉及飞行器,尤其是涉及一种基于流体推力矢量的飞行控制方法、装置及控制设备。
背景技术:
1、一般情况下,飞行器绕俯仰、滚转和偏航轴的控制分别是由升降舵、副翼和方向舵来实现,这些操纵舵面的偏转改变了飞行器的几何边界条件,使飞行器的绕流发生较大的改变,从而产生飞行控制所需的气动力和气动力矩。随着技术的发展,对低可探测性、短距起降性能、机动性和敏捷性能需求的提高,一种全新的飞行控制理念—无操纵面飞行控制技术被研究人员提出。可以采用流体式飞行控制技术实现无操纵面飞行控制,这种技术可以彻底取消飞行器上的襟翼、副翼、升降舵、方向舵,甚至整个平尾和垂尾,最大程度地缓解以至完全避免目前活动操纵面所带来的各种弊端。
2、目前,采用流体式飞行控制技术实现无操纵面飞行控制的方式包括:矢量执行机构利用流体推力矢量技术,通过吹气改变喷管壁的静压,从而改变尾部喷流的方向角(即改变发动机尾喷口的喷流方向),实现推力矢量化,利用流体式推力矢量实现飞行器的俯仰控制。
3、矢量执行机构机理相对复杂,其模型的建立依赖于地面试验,并且阀门开度与矢量偏角的关系是在气流稳定条件下测得的,与实际飞行存在一定差异,造成矢量执行机构模型的精确度较低;其中,阀门开度用于改变喷管壁的静压,从而改变矢量角。若直接不加处理的将不精确的模型应用于飞行器的控制系统,则无法保证实际飞行中飞行器的姿态稳定。同时,被动式流体推力矢量射流偏转过程中存在的滞回特性会降低控制系统的稳定性,并产生振荡与相位滞后,影响控制系统的快速性并降低矢量执行机构的定位精度,进而影响飞行器姿态的控制精度。
技术实现思路
1、本发明的目的在于提供一种基于流体推力矢量的飞行控制方法、装置及控制设备,以缓解因模型精度不足与滞回非线性导致的控制系统稳定性下降的问题。
2、第一方面,本发明实施例提供了一种基于流体推力矢量的飞行控制方法,包括:
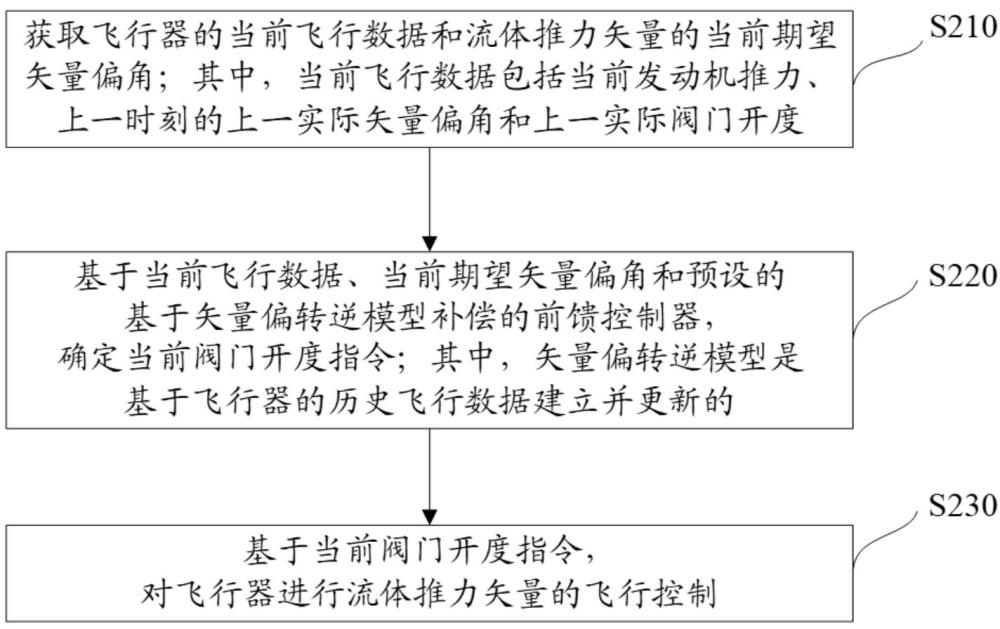
3、获取飞行器的当前飞行数据和流体推力矢量的当前期望矢量偏角;其中,所述当前飞行数据包括当前发动机推力、上一时刻的上一实际矢量偏角和上一实际阀门开度;
4、基于所述当前飞行数据、所述当前期望矢量偏角和预设的基于矢量偏转逆模型补偿的前馈控制器,确定当前阀门开度指令;其中,所述矢量偏转逆模型是基于所述飞行器的历史飞行数据建立并更新的;
5、基于所述当前阀门开度指令,对所述飞行器进行流体推力矢量的飞行控制。
6、进一步地,所述基于所述当前飞行数据、所述当前期望矢量偏角和预设的基于矢量偏转逆模型补偿的前馈控制器,确定当前阀门开度指令,包括:
7、基于所述当前飞行数据和所述当前期望矢量偏角,通过所述前馈控制器生成前馈控制指令;
8、基于所述上一实际矢量偏角和所述当前期望矢量偏角,通过预设的误差反馈控制器生成反馈控制指令;
9、基于所述前馈控制指令和所述反馈控制指令,确定当前阀门开度指令。
10、进一步地,所述矢量偏转逆模型是采用多项式拟合方法建立的;所述基于所述当前飞行数据和所述当前期望矢量偏角,通过所述前馈控制器生成前馈控制指令,包括:
11、判断所述当前期望矢量偏角是否等于所述上一实际矢量偏角;
12、如果等于所述上一实际矢量偏角,确定所述前馈控制指令为所述上一实际阀门开度;
13、如果不等于所述上一实际矢量偏角,将所述当前发动机推力和所述当前期望矢量偏角输入所述矢量偏转逆模型中,得到至少一个候选解,并将所述至少一个候选解中满足预设条件的目标解,确定为所述前馈控制指令;其中,所述预设条件包括属于实数、绝对值大小位于预设数值范围内,且与所述上一实际阀门开度的差值最小。
14、进一步地,所述方法还包括:
15、获取所述飞行器经地面试验得到的多组初始飞行数据;
16、采用多项式拟合方法,基于所述多组初始飞行数据建立所述矢量偏转逆模型。
17、进一步地,所述采用多项式拟合方法,基于所述多组初始飞行数据建立所述矢量偏转逆模型之后,所述方法还包括:
18、获取所述飞行器在历史飞行过程中的多组实际飞行数据;
19、采用多项式拟合方法,基于所述多组实际飞行数据建立候选逆模型;
20、根据所述候选逆模型对当前的所述矢量偏转逆模型进行更新,得到更新后的矢量偏转逆模型。
21、进一步地,所述根据所述候选逆模型对当前的所述矢量偏转逆模型进行更新,得到更新后的矢量偏转逆模型,包括:
22、基于预设的评价指标函数,计算得到所述候选逆模型的评价指标值;
23、判断所述评价指标值是否小于预设指标阈值;
24、如果小于所述预设指标阈值,对所述候选逆模型和当前的所述矢量偏转逆模型进行加权融合,得到更新后的矢量偏转逆模型。
25、进一步地,所述方法还包括:
26、如果大于或等于所述预设指标阈值,重新执行所述获取所述飞行器在历史飞行过程中的多组实际飞行数据的步骤;其中,所述预设指标阈值与所述多组实际飞行数据的数据量和所述矢量偏转逆模型的精确度成负相关关系。
27、第二方面,本发明实施例还提供了一种基于流体推力矢量的飞行控制装置,包括:
28、获取模块,用于获取飞行器的当前飞行数据和流体推力矢量的当前期望矢量偏角;其中,所述当前飞行数据包括当前发动机推力、上一时刻的上一实际矢量偏角和上一实际阀门开度;
29、确定模块,用于基于所述当前飞行数据、所述当前期望矢量偏角和预设的基于矢量偏转逆模型补偿的前馈控制器,确定当前阀门开度指令;其中,所述矢量偏转逆模型是基于所述飞行器的历史飞行数据建立并更新的;
30、控制模块,用于基于所述当前阀门开度指令,对所述飞行器进行流体推力矢量的飞行控制。
31、第三方面,本发明实施例还提供了一种控制设备,包括存储器、处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现第一方面所述基于流体推力矢量的飞行控制方法。
32、第四方面,本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行第一方面所述基于流体推力矢量的飞行控制方法。
33、本发明实施例提供的基于流体推力矢量的飞行控制方法、装置及控制设备,能够获取飞行器的当前飞行数据和流体推力矢量的当前期望矢量偏角;其中,当前飞行数据包括当前发动机推力、上一时刻的上一实际矢量偏角和上一实际阀门开度;基于当前飞行数据、当前期望矢量偏角和预设的基于矢量偏转逆模型补偿的前馈控制器,确定当前阀门开度指令;其中,矢量偏转逆模型是基于飞行器的历史飞行数据建立并更新的;基于当前阀门开度指令,对飞行器进行流体推力矢量的飞行控制。这样基于飞行器的历史飞行数据建立并更新矢量偏转逆模型,以矢量偏转逆模型作为前馈控制的基础,进而得到飞行控制所需的当前阀门开度指令,一方面通过前馈控制实现了流体推力矢量控制的滞环非线性抑制,另一方面矢量偏转逆模型通过历史飞行数据建立和不断迭代更新,提高了流体推力矢量的控制精度,因此缓解了因模型精度不足与滞回非线性导致的控制系统稳定性下降的问题。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220538.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表