低燃料消耗的低轨卫星轨道恢复方法
- 国知局
- 2024-08-01 05:39:18
本发明涉及低燃料消耗的低轨卫星轨道恢复方法,属于卫星轨道恢复。
背景技术:
1、在航天领域,轨道恢复是指通过执行机构(通常为推力器)的作用,调整、修正或者纠正卫星航天器或其他太空飞行器的轨道。随着技术的发展,卫星寿命增加,而各种扰动的存在,使得在寿命周期内卫星轨道偏离愈发明显;同时由于低轨道太空垃圾数量的增加,低轨卫星和探测器轨道碰撞的风险增加,因此卫星的轨道恢复技术变得越来越重要。
2、近年来低轨卫星的发展呈现集群化、小型化、长寿命化和低成本化等趋势,电推力器由于具有比冲高,消耗的燃料少等特点,已经逐渐在低轨卫星中取代固体火箭发动机和液体火箭发动机,成为低轨卫星轨道机动发动机的首选。现有连续推力航天器的轨道机动方法包括直接法,间接法和混合法等,为了便于迭代过程的收敛,通常选择简化的航天器动力学模型,将地球扁率、太阳光压等带来的影响考虑为外界干扰。这就使得低轨航天器在轨道寿命内需要频繁进行轨道调整,不利于卫星的低燃料消耗在轨长期运行。
技术实现思路
1、针对现有轨道机动方法需要频繁进行轨道调整,不利于卫星的低燃料消耗在轨长期运行的问题,本发明提供一种低燃料消耗的低轨卫星轨道恢复方法。
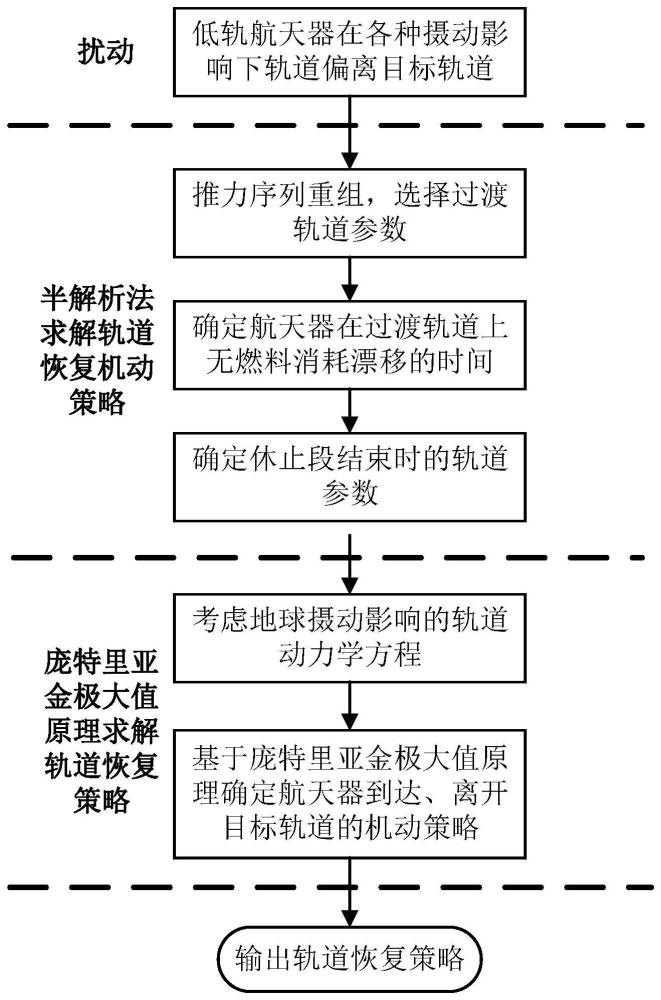
2、本发明的一种低燃料消耗的低轨卫星轨道恢复方法,包括,
3、建立考虑地球扁率摄动的轨道动力学方程;
4、利用半解析法根据卫星的当前轨道和目标轨道求解低燃料消耗的过渡轨道初始轨道根数;同时结合所述轨道动力学方程,计算卫星在过渡轨道上利用地球扁率摄动进行无燃料消耗漂移所需的漂移时间及过渡结束时刻的过渡轨道最终轨道根数;卫星的当前轨道为受扰动后轨道;
5、基于庞特里亚金极大值原理,结合性能指标函数、哈密顿函数和开关控制函数计算卫星由当前轨道到过渡轨道的推力器燃料最优控制率序列以及卫星由过渡轨道到目标轨道的推力器燃料最优控制率序列,并控制推力器实现卫星的轨道恢复。
6、根据本发明的低燃料消耗的低轨卫星轨道恢复方法,考虑地球扁率摄动的轨道动力学方程为:
7、
8、式中v为卫星速度,f为推力加速度,β为推力方向角,表示卫星推力矢量与速度矢量的夹角,i为卫星轨道倾角,ω为卫星升交点赤经,k为升交点赤经进动常数,k=1.0425×10-33s6/m7。
9、根据本发明的低燃料消耗的低轨卫星轨道恢复方法,卫星的当前轨道根数和目标轨道根数设定如下:
10、假设卫星的机动过程时段为t0→tf,其中t0为卫星在当前轨道的开始轨道恢复时刻,tf为卫星回到目标轨道的时刻;则对应的轨道根数变化为v0,i0,ω0→vf,if,ωf,其中v0为当前轨道的卫星速度,i0为当前轨道的卫星轨道倾角,ω0为当前轨道的卫星升交点赤经;vf为目标轨道的卫星速度,if为目标轨道的卫星轨道倾角,ωf为目标轨道的卫星升交点赤经。
11、卫星的机动过程时段t0→tf形成一个轨道周期,每个轨道周期内使卫星由当前轨道转移至目标轨道的过程分为三个阶段,包括一次推进段、漂移段和二次推进段;其中一次推进段的一次推进时间表示为t1,漂移段的漂移时间表示为t2,二次推进段的二次推进时间表示为t3,则:
12、tf=t1+t2+t3。
13、根据本发明的低燃料消耗的低轨卫星轨道恢复方法,漂移时间t2的计算方法为:
14、计算过渡轨道的初始卫星升交点赤经进动速度与目标轨道的卫星升交点赤经进动速度的进动速度差
15、
16、式中vd为过渡轨道的初始卫星速度,id为过渡轨道的初始卫星轨道倾角;
17、则漂移时间t2为:
18、
19、式中ωd为过渡轨道的初始卫星升交点赤经,ωd=ω0。
20、根据本发明的低燃料消耗的低轨卫星轨道恢复方法,过渡轨道初始轨道根数的计算方法为:
21、建立燃料最优轨道维持的优化模型:
22、
23、s.t.ω(tf)=ωf
24、式中mf为两次推进段的总推进剂消耗量;
25、令λv,1为一次推进段的卫星速度协态变量,λi,1为一次推进段的卫星轨道倾角协态变量,λv,3为二次推进段的卫星速度协态变量,λi,3为二次推进段的卫星轨道倾角协态变量,则总推进剂消耗量函数的梯度表示为:
26、
27、选取过渡轨道的初始卫星轨道倾角id作为自由变量,结合公式(2),将公式(4)变形为:
28、
29、式中λi,2为漂移段的卫星轨道倾角协态变量,λv,2为漂移段的卫星速度协态变量;
30、对公式(5)使用庞特里亚金极小值原理求解λv,1、λi,1、λv,2和λi,2,再使公式(5)的梯度为0,求解获得过渡轨道的初始卫星轨道倾角id。
31、根据本发明的低燃料消耗的低轨卫星轨道恢复方法,过渡结束时刻的过渡轨道最终轨道根数的确定方法为:
32、在t1时间段起始的t0时刻卫星轨道根数v0,i0,ω0经一次推进段后,在t1时间段的终止时刻得到过渡轨道初始轨道根数vd,id,ωd,再经休止段由j2项导致的升交点赤经进动后,在t2时间段的终止时刻得到过渡轨道最终轨道根数vd,id,ωf;
33、进而计算获得漂移时间t2的值。
34、根据本发明的低燃料消耗的低轨卫星轨道恢复方法,选取性能指标函数:
35、
36、tmax为推力器最大推力,c为推力常数,c=isp·g0,isp表示推力器比冲,g0为地球表面的重力加速度,u为推力器燃料控制率序列,t为时间。
37、根据本发明的低燃料消耗的低轨卫星轨道恢复方法,选取哈密顿函数h:
38、
39、式中λv表示卫星速度协态变量,λi表示卫星轨道倾角协态变量,λω为卫星升交点赤经协态变量,协态变量[λv,λi,λω]满足如下方程:
40、
41、根据本发明的低燃料消耗的低轨卫星轨道恢复方法,开关控制函数s为:
42、
43、使推力器燃料控制率序列u受开关控制函数s的影响,选择为:
44、
45、式中u*(t)为燃料最优条件下推力器燃料控制率序列u的最优控制率序列;
46、在最优控制率序列u*(t)的条件下,推力方向角β的最优推力方向角序列β*(t)为:
47、
48、根据本发明的低燃料消耗的低轨卫星轨道恢复方法,最优控制率序列u*(t)和最优推力方向角序列β*(t)的求解方法为:
49、设定打靶变量z=[λv(t0),λi(t0),λω(t0),λm(t0),tf]t,式中λm为卫星质量m对应的协态变量;再联合初始状态变量[v(t0),i(t0),ω(t0),m(t0)]t,求解如下边界条件:
50、
51、式中t10为t1时间段的终止时刻,t20为t2时间段的终止时刻;
52、使用非线性求解器求解边界条件,得到最优控制率序列u*(t)和最优推力方向角序列β*(t);在求解过程中计算每一步的雅可比矩阵加速求解过程的收敛。
53、本发明的有益效果:本发明方法可以提高卫星轨道调整的效率。它通过选择合适的过渡轨道,采用半解析法与庞特里亚金极大值原理相结合,借助地球扁率摄动实现低燃料消耗的轨道机动。本发明方法能够降低长寿命低轨卫星的燃料成本,并且通过仿真分析可以快速收敛。有望为卫星运行和航天任务的可持续性和经济性带来显著的改善。
本文地址:https://www.jishuxx.com/zhuanli/20240722/220857.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表