一种四轮独立驱动与转向的飞机牵引车控制系统和方法与流程
- 国知局
- 2024-08-01 05:43:25
本发明属于智能装备,具体涉及一种四轮独立驱动与转向的飞机牵引车控制系统和方法。
背景技术:
1、在很多情况下,飞机不能依靠自身动力进行滑行,例如倒车出港、动力发生故障或是在机库等狭小空间内移动等情况。目前,针对这些情况下的飞机移动大多是依靠飞机牵引车来实现。
2、传统的飞机牵引车多是通过牵引杆与飞机机轮连接后进行牵引作业,近几年国内外主流的产品均开始取消牵引杆,采用牵引车自带的抱轮机构将飞机机轮抱住并举起离开地面后进行牵引作业。由于无杆飞机牵引车剩去了牵引杆,使牵引作业时的转弯半径有效减小,提高了在狭小空间进行飞机牵引作业的灵活性。无杆牵引车在对飞机机轮进行抱举时,首先需要与飞机机轮完成较为精准的对接,以避免牵引车偏载对飞机造成损伤,此过程一般较难操作以致耗时较多。特别是在舰船等海上移动平台上对飞机进行牵引时,牵引车的转弯半径越小,运动越灵活,机轮对接越精准快捷,越能提高飞机的停置和出动效率。
技术实现思路
1、鉴于此,本发明提供一种四轮独立驱动与转向的飞机牵引车控制系统和方法,以提升飞机停置和出动效率。
2、具体方案如下:
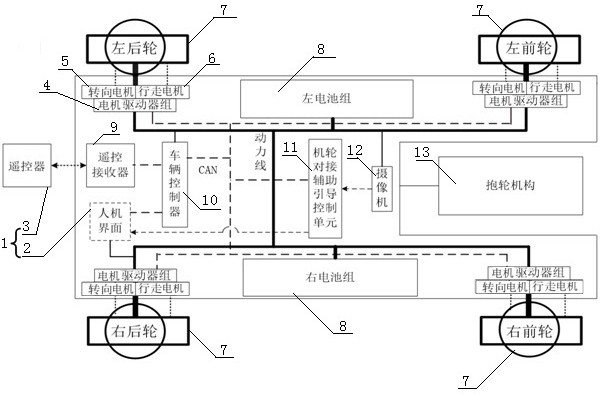
3、一种四轮独立驱动与转向的飞机牵引车控制系统,包括车轮、人机交互设备、车辆控制器和机轮对接辅助引导系统,每个车轮处均设置有电机组和电机驱动器组,所述电机组和电机驱动器组电连接,所述电机驱动器组、机轮对接辅助引导系统和人机交互设备均与车辆控制器电连接。
4、所述车辆控制器包括信息管理模块和运动控制模块,所述信息管理模块和运动控制模块电连接,所述信息管理模块用于飞机机型参数的设定以及控制参数的计算与调整,所述运动控制模块用于飞机牵引车速度的分配和车轮转角的分配。
5、所述人机交互设备包括人机界面和遥控组件,所述遥控组件包括遥控器和遥控接收器,所述遥控器通过有线或无线与遥控接收器通信连接,所述遥控接收器通过can与车辆控制器电连接,所述车辆控制器通过can与人机界面电连接,所述人机界面为触摸显示屏。
6、所述机轮对接辅助引导系统包括机轮对接辅助引导控制单元、摄像机和抱轮机构,所述摄像机正对抱轮机构,所述摄像机和机轮辅助引导控制单元can通信连接,所述机轮对接辅助引导控制单元与车辆控制器can通信连接,所述人机界面与机轮对接辅助引导控制单元can通信连接。
7、所述车辆控制系统中还包括电池组,所述电机驱动器组、车辆控制器和摄像机均与电池组电连接。
8、所述电机驱动器组包括行走控制器和转向控制器,所述电机组包括转向电机和行走电机,所述行走控制器与行走电机电连接,所述行走电机与车轮中心轴固定连接,所述转向控制器与转向电机电连接,所述转向电机固定与车轮轮侧,所述车轮上设置有齿轮组,所述转向电机通过齿轮组驱动车轮转向。
9、所述行走电机内设置有增量式编码器,所述转向电机内设置有绝对值编码器,所述增量式编码器通过行走控制器与车辆控制器电连接,所述绝对值编码器通过转向控制器与车辆控制器电连接。
10、四轮独立驱动与转向的飞机牵引车控制方法,包括如下步骤:
11、步骤:通过人机界面选择此次所要牵引飞机的机型,车辆控制器内的信息管理模块会根据所设定的机型参数,进行控制参数的计算与调整;
12、步骤:打开车辆遥控器,遥控牵引车前往作业区域,根据行驶路况,通过遥控器上的运动模式选择开关,切换合适的车辆运动模式;
13、步骤:车辆遥控器输出的车辆速度、转角和运动模式,并发送给车辆控制器,车辆控制器的信息管理模块汇总后以指令下发给运动控制模块作为输入,运动控制模块根据车辆运动模式调用相应的运动学模型函数,解算出四轮转速和四轮转角,并分配给相应的电机驱动器;电机驱动器根据设定的速度控制模式和位置控制模式,分别输出相应的控制力矩给行走电机和转向电机;
14、步骤:通过遥控器开启对接辅助系统,根据人机界面显示的机轮对接辅助引导画面,操作遥控器控制车辆完成与机轮的对接,并通过抱轮机构将机轮抱起。
15、所述对接辅助引导画面包括实时图像、静态辅助线和动态辅助线,实时图像为经数据处理修正后的抱轮机构前方图像,静态辅助线包括第一静态辅助线、第二静态辅助线和第三静态辅助线,三条静态辅助线始终与车体纵向平行的辅助线,第二静态辅助线与车体纵向中轴线重合,以标识出飞机机轮对中位置,第一静态辅助线和第三静态辅助线与抱轮机构两侧开挡内沿重合并向外延伸,以标识出机轮对接的可通行区域,所述动态辅助线为两条,两条动态辅助线标识两个前侧车轮的动态运动轨迹。
16、步骤中,车辆完成与机轮对接还包括转弯找准方法和直行对准方法,
17、所述转弯找准方法为,操作遥控器控制车辆前行,并不断调整转向角度,使机轮进入画面中的两条动态辅助线内中间,直至牵引车的车身与机轮平行。
18、所述直行对准方法为,操控车辆向前行驶,使得第二静态辅助线对准机轮中心,接近机轮时,使得车轮不触碰第一静态辅助线或第三静态辅助线
19、本发明公开了一种四轮独立驱动与转向的飞机牵引车控制系统和方法,包括车轮、人机交互设备、车辆控制器和机轮对接辅助引导系统,能实现飞机牵引车的全向运动控制和机轮对接的辅助引导功能,在此基础上实现飞机牵引作业效率和安全性的提升,特别是针对机库、舰船等狭小空间内的应用场景,对于提高飞机的停置和出动效率大有益处。
技术特征:1.一种四轮独立驱动与转向的飞机牵引车控制系统,其特征在于:包括车轮(7)、人机交互设备(1)、车辆控制器(10)和机轮对接辅助引导系统(18),每个车轮(7)处均设置有电机组和电机驱动器组(4),所述电机组和电机驱动器组(4)电连接,所述电机驱动器组(4)、机轮对接辅助引导系统(18)和人机交互设备(1)均与车辆控制器(10)电连接。
2.根据权利要求1所述的四轮独立驱动与转向的飞机牵引车控制系统,其特征在于:所述车辆控制器(10)包括信息管理模块(14)和运动控制模块(15),所述信息管理模块(14)和运动控制模块(15)电连接,所述信息管理模块(14)用于飞机机型参数的设定以及控制参数的计算与调整,所述运动控制模块(15)用于飞机牵引车速度的分配和车轮(7)转角的分配。
3.根据权利要求1所述的四轮独立驱动与转向的飞机牵引车辆控制系统,其特征在于:所述人机交互设备(1)包括人机界面(2)和遥控组件,所述遥控组件包括遥控器(3)和遥控接收器(9),所述遥控器(3)通过有线或无线与遥控接收器(9)通信连接,所述遥控接收器(9)通过can与车辆控制器(10)电连接,所述车辆控制器(10)通过can与人机界面(2)电连接,所述人机界面(2)为触摸显示屏。
4.根据权利要求2所述的四轮独立驱动与转向的飞机牵引车控制系统,其特征在于:所述机轮对接辅助引导系统(18)包括机轮对接辅助引导控制单元(11)、摄像机(12)和抱轮机构(13),所述摄像机(12)正对抱轮机构(13),所述摄像机(12)和机轮辅助引导控制单元(11)can通信连接,所述机轮对接辅助引导控制单元(11)与车辆控制器(10)can通信连接,所述人机界面(2)与机轮对接辅助引导控制单元(11)can通信连接。
5.根据权利要求4所述的四轮独立驱动与转向的飞机牵引车辆控制系统,其特征在于:所述车辆控制系统中还包括电池组(8),所述电机驱动器组(4)、车辆控制器(10)和摄像机(12)均与电池组(8)电连接。
6.根据权利要求1所述的四轮独立驱动与转向的飞机牵引车辆控制系统,其特征在于:所述电机驱动器组(4)包括行走控制器(16)和转向控制器(17),所述电机组包括转向电机(5)和行走电机(6),所述行走控制器(16)与行走电机(6)电连接,所述行走电机(6)与车轮(7)中心轴固定连接,所述转向控制器(17)与转向电机(5)电连接,所述转向电机(5)固定与车轮(7)轮侧,所述车轮(7)上设置有齿轮组,所述转向电机(5)通过齿轮组驱动车轮(7)转向。
7.根据权利要求6所述的四轮独立驱动与转向的飞机牵引车辆控制系统,其特征在于:所述行走电机(6)内设置有增量式编码器,所述转向电机(5)内设置有绝对值编码器,所述增量式编码器通过行走控制器(16)与车辆控制器(10)电连接,所述绝对值编码器通过转向控制器(17)与车辆控制器(10)电连接。
8.根据权利要求1至7任一权利要求所述的四轮独立驱动与转向的飞机牵引车控制方法,其特征在于:包括如下步骤:
9.根据权利8所述的四轮独立驱动与转向的飞机牵引车控制方法,其特征在于:所述对接辅助引导画面包括实时图像(25)、静态辅助线和动态辅助线(20),实时图像为经数据处理修正后的抱轮机构(13)前方图像,静态辅助线包括第一静态辅助线(21)、第二静态辅助线(22)和第三静态辅助线(23),三条静态辅助线始终与车体纵向平行的辅助线,第二静态辅助线(22)与车体纵向中轴线重合,以标识出飞机机轮对中位置,第一静态辅助线(21)和第三静态辅助线(23)与抱轮机构(13)两侧开挡内沿重合并向外延伸,以标识出机轮对接的可通行区域,所述动态辅助线(20)为两条,两条动态辅助线标识两个前侧车轮的动态运动轨迹。
10.根据权利要求9所述的四轮独立驱动与转向的飞机牵引车控制方法,其特征在于:步骤4中,车辆完成与机轮对接还包括转弯找准方法和直行对准方法,
技术总结本发明公开了一种四轮独立驱动与转向的飞机牵引车控制系统和方法,系统包括车轮、人机交互设备、车辆控制器和机轮对接辅助引导系统,方法为通过人机界面选择此次所要牵引飞机的机型,车辆控制器进行控制参数的计算与调整;遥控牵引车前往作业区域,根据行驶路况,通过遥控器上的运动模式选择开关,切换合适的车辆运动模式;车辆遥控器输出的车辆速度、转角和运动模式,并发送给车辆控制器,电机驱动器根据设定的速度控制模式和位置控制模式,分别输出相应的控制力矩给行走电机和转向电机;根据人机界面显示的机轮对接辅助引导画面,操作遥控器控制车辆完成与机轮的对接,并将机轮抱起,提高飞机牵引作业的安全性、降低作业人员操作难度。技术研发人员:王姣龙,赵建波,李剑飞,郑博天,高治华,刘建伟,刘欢,张鸣扬受保护的技术使用者:中国船舶重工集团公司第七一三研究所技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/221082.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表