一种固定翼垂直起降飞行器及其起降方法与流程
- 国知局
- 2024-08-01 05:44:11
本发明涉及一种飞行器以及该飞行器的起降方法,尤其涉及一种固定翼垂直起降飞行器(vtol)以及该飞行器的起降方法。
背景技术:
1、2024年初,工业和信息化部、科学技术部等印发的《通用航空装备创新应用实施方案(2024-2030)》正式实施,意味着我国“低空经济”将迎来快速发展的阶段,到2030年“低空经济”预计将形成万亿级市场规模。
2、固定翼垂直起降飞行器具有无需跑道起降(任意场所起降)、长续航等优点,是一种适合“低空经济”发展的飞行器械,可以广泛应用于货物运输、载客、探测、军工等领域。
3、多家企事业单位相继研发出固定翼垂直起降飞机,例如中国科学院长春光机所成功研发了“双飞翼垂起固定翼无人机”,该无人机可以实现竖直状态下的一个垂直起降,起飞后实现一个平飞。这款无人机实现了在零下40度、海拔5500米,以及在7级强风中正常起降的技术目标。
4、四川傲势科技有限公司推出了x-hawk尾座式垂直起降水平飞行无人机,x-hawk兼具固定翼飞机长距离、长航时和多旋翼飞机小范围内垂直起降的特性。这款无人机最高时速可达120公里,最大起飞重量18公斤,正常载荷3到5公斤,相对比于多旋翼无人机,其续航能力和载重都要大大领先。
5、固定翼垂直起降飞机为了实现垂直起降功能,需要额外增加机构,如起飞发动机、可倾斜机翼等,这会增加无人机的重量和阻力,牺牲部分气动载重能力;同时为了满足垂直起降的需求,固定翼垂直起降飞机的油箱或电池容量会受到限制,导致航时相对较短。
6、综上所述,虽然固定翼垂直起降飞行器拥有垂直起降、长续航等优点,但是因为需要加配其它部件,导致固定翼垂直起降飞行器的净重增加,降低了飞行器的续航能力,本发明的固定翼垂直起降飞行器利用调节飞行器的飞行姿态的方法,在不加配发动机的情况下实现固定翼飞行器垂直起降。
技术实现思路
1、技术问题
2、本发明的目的是提供一种可以垂直起降的固定翼飞行器及垂直起降的方法,该飞行器在尾部安装有后推式发动机,头部安装有支撑杆,利用改变发动机旋转方向来改变飞行器的飞行姿态,从而让飞行器从垂飞的状态切换到平飞的状态,解决固定翼垂直起降飞行器起重不足的问题。
3、技术方案
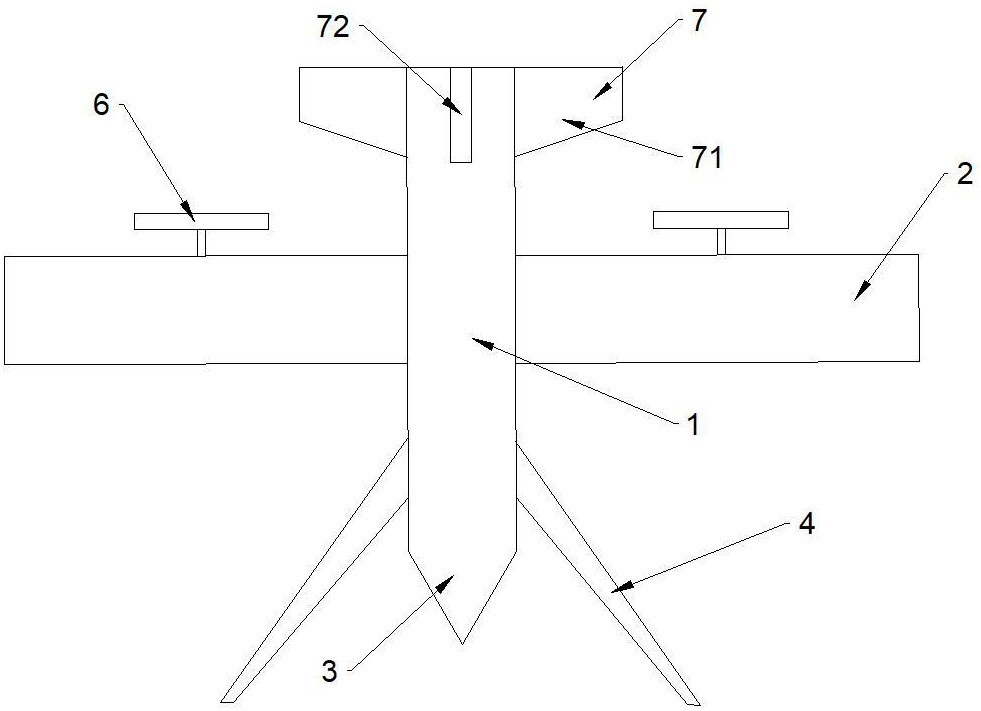
4、本发明提供的一种固定翼垂直起降飞行器,它包括:机身、机翼,机翼固定机身的中部,机身内安装有引擎,在机尾或者机翼的后部安装有后推式螺旋桨,后推式螺旋桨和引擎相连,后推式引擎尾螺旋桨提供旋转动力。
5、飞行器的头部安装有支撑架,支撑架包括三个支撑杆,支撑架支撑固定翼垂直起降飞行器以机头朝下、机尾朝上的姿态倒立在地面或平台上。
6、机身安装有控制装置、姿态传感器、电源,控制装置安装在机身内,控制装置和所述的引擎通过导线连接;姿态传感器和所述控制装置通过导线连接,所述姿态传感器将所述固定翼垂直起降飞行器的姿态数据传送给所述控制装置;电源和所述控制装置连接。
7、本发明提供的一种固定翼垂直起降飞行器的起降方法,它包括以下步骤:
8、步骤1.将本发明所述的固定翼垂直起降飞行器倒立在地面上或平台上,飞行器位于头部的支撑架支撑所述飞行器保持机头朝下、机尾朝上的倒立姿态;
9、步骤2.将所述飞行器的引擎打开,带动所述的后推式螺旋桨旋转,所述螺旋桨产生向上拉力,拉动所述飞行器以倒立姿态上升;
10、步骤3.所述飞行器上升到一定高度后,改变所述飞行器的螺旋桨旋转方向,所述螺旋桨产生向下推力,所述飞行器在螺旋桨的向下推力和重力的作用下向下加速运动,飞行器机翼产生垂直于机翼平面的拉力,拉动飞行器向水平方向偏转;
11、步骤4.姿态传感器获取飞行器的姿态,控制装置控制螺旋桨的转速,将飞行器逐渐从倒立姿态调整到平飞姿态;
12、步骤5.当所述飞行器将到达落地地点时,利用所述控制装置改变所述螺旋桨的旋转方向,螺旋桨产生向机身后方向的拉力;
13、步骤6.姿态传感器获取飞行器的姿态数据,控制装置控制螺旋桨的转速,调整飞行器从水平姿态到倒立姿态;
14、步骤7.当机身处于倒立姿态后,控制装置调整螺旋桨的转速,让飞行器以倒立的姿态下降;
15、s07.当支撑杆接触到地面或平台后,控制装置关掉引擎,完成降落。
16、本发明的一种固定翼垂直起降飞行器还包括伸缩装置,伸缩装置安装机身内,伸缩装置包括伸缩杆,伸缩杆和支撑杆相连,伸缩装置和控制装置相连,在飞行器离开地面时,控制装置控制伸缩装置的伸缩杆收缩,将支撑杆收缩到飞行器机身内或飞行器机身表面,减少空气阻力;当飞行器降落时,控制装置控制伸缩装置的伸缩杆伸出,将支撑杆展开。
17、本发明的一种固定翼垂直起降飞行器还包括信号系统,所述信号系统和所述控制装置通过导线相连,所述信号系统发送和接收信号。
18、本发明的一种固定翼垂直起降飞行器还包括高度传感器,所述高度传感器通过导线和所述的控制装置相连,高度传感器将飞行器距离地面或者平台的高度传输给控制系统,控制系统利用高度传感器的数据控制螺旋桨的转速,控制飞行器起降。
19、本发明的一种固定翼垂直起降飞行器还包括摄像头,所述摄像头通过导线和所述的控制装置相连。
20、本发明的一种固定翼垂直起降飞行器还包括尾翼,所述尾翼安装在所述机身的尾部,所述尾翼包括升降舵和方向舵,所述升降舵和所述方向舵分别和所述的控制装置相连。
21、本发明的一种固定翼垂直起降飞行器还包括雷达,所述雷达通过导线和所述的控制装置相连,控制装置利用雷达数据控制飞行器的飞行方向和速度,避免和障碍物或其它飞行器碰撞。
22、本发明的一种固定翼垂直起降飞行器的伸缩装置是液压伸缩装置。
技术特征:1.一种固定翼垂直起降飞行器,其特征在于,它包括:
2.一种固定翼垂直起降飞行器的起降方法,其特征在于,它包括如下步骤:
3.根据权利要求1所述的一种固定翼垂直起降飞行器,其特征在于:它还包括伸缩装置,所述伸缩装置安装所述机身内,所述伸缩装置包括伸缩杆,所述伸缩杆和所述支撑杆相连,所述伸缩装置和所述控制装置相连。
4.根据权利要求1所述的一种固定翼垂直起降飞行器,其特征在于:它还包括信号系统,所述信号系统和所述控制装置通过导线相连,所述信号系统发送和接收信号。
5.根据权利要求1所述的一种固定翼垂直起降飞行器,其特征在于:它还包括高度传感器,所述高度传感器通过导线和所述的控制装置相连。
6.根据权利要求1所述的一种固定翼垂直起降飞行器,其特征在于:它还包括摄像头,所述摄像头通过导线和所述的控制装置相连。
7.根据权利要求1所述的一种固定翼垂直起降飞行器,其特征在于:它还包括尾翼,所述尾翼安装在所述机身的尾部,所述尾翼包括升降舵和方向舵,所述升降舵和所述方向舵分别和所述的控制装置相连。
8.根据权利要求1所述的一种固定翼垂直起降飞行器,其特征在于:它还包括雷达,所述雷达通过导线和所述的控制装置相连。
9.根据权利要求1和权利要求3所述的一种固定翼垂直起降飞行器,其特征在于所述收缩装置是液压收缩装置。
技术总结本发明公开了一种固定翼垂直起降飞行器及其起降方法,飞行器包括机身,机翼,后推式螺旋桨,支撑架,姿态传感器,支撑架安装在机身的头部,后推式螺旋桨安装在机身尾部或机翼后部,在飞行器起飞前,支撑架支撑飞机倒立,机头朝下,机尾朝上,螺旋桨反向旋转,为飞行器提供向上升力,当飞行器上升到一定高度后,螺旋桨正向旋转,为飞行器提供向下推力,飞机加速向下俯冲,利用机翼提供的横向力,机身翻转向水平方向,飞行器切换到平飞状态。本发明固定翼垂直起降飞行器的后退式螺旋桨为飞行器起降和巡航提供动力。技术研发人员:赵罡,赵雨欣,赵雨桐受保护的技术使用者:赵勇技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/221144.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表