适用于翼身融合飞行器变形翼机构的制作方法
- 国知局
- 2024-08-01 05:44:06
本发明属于飞行器结构领域,具体地,涉及一种飞行器变形翼机构。尤其是适用于翼身融合飞行器的变形翼机构。
背景技术:
1、翼身融合飞行器可采用翼面变形技术改变其气动外形,以获得不同飞行高度及速度下对应的最大气动效益。当飞行器处于火箭助推高速飞行状态下,其气动外形需要保持较小的迎风面积,尽可能地减小飞行阻力;当飞行器处于末端低速巡航飞行状态下,其气动外形需要具备较大的升阻比,减少其飞行过程中的能耗。现有变形翼技术主要针对传统固定翼飞机进行设计,其翼面变形机构尺寸较大,占用较大的飞行器内部空间,不适用于结构紧凑的战术飞行器。因此,有必要设计一种连续可调的伸缩变形翼机构,实现战术飞行器的翼面可控变形。
2、本发明目的在于针对上述存在的现有技术问题,提供一种变形翼机构,以更加适用于翼身融合飞行器等多样外形构造的飞行器。
3、现有的相关技术成果有:
4、一种翼盒及飞行器(专利文献cn12960123a)该专利文献公开了一种供一种翼盒及飞行器,其翼盒结构仅为翼面运动机构组的外包络框架,无存放翼面的功能。翼面变形仅实现翼面的后掠角、轴向位置及机翼上反自由度上的变形,整体飞行器翼面面积及气动外形没有较大变化。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种飞行器变形翼机构。
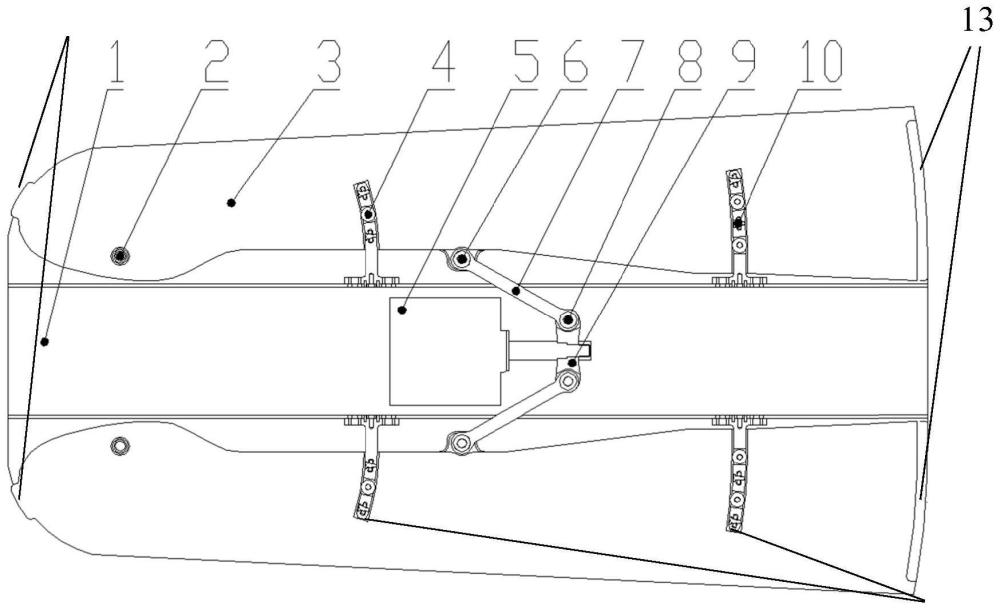
2、根据本发明提供的一种飞行器变形翼机构,包括:翼盒1、转轴2、翼面3;
3、所述翼盒1两侧对称布置有一对翼面1,翼盒1与翼面3的连接及结构形式完全对称;
4、所述翼面3通过转轴2与翼盒1连接,翼面3相对于翼盒1绕转轴2能够进行旋转运动。
5、优选地,所述飞行器变形翼机构还包括:传动杆组件7;
6、所述传动杆组件7包括:传动杆701、深沟球轴承702、轴承盖板703;
7、所述传动杆701两端均嵌有深沟球轴承702,传动杆701通过轴承盖板703固定深沟球轴承702外圈;
8、所述传动杆701为两侧对称的哑铃状结构形式。
9、优选地,所述飞行器变形翼机构还包括:前支撑杆4、传动螺钉6、驱动螺钉8、驱动杆9、后支撑杆10;
10、所述前支撑杆4与后支撑杆10的一端与翼盒1固连;
11、所述传动杆组件7的一端与翼面3的支耳处通过传动螺钉6连接,传动杆组件7的另一端与驱动杆9通过驱动螺钉8连接;
12、所述传动螺钉6及驱动螺钉8均与深沟球轴承702内圈过盈配合连接。
13、优选地,所述飞行器翼面变形机构还包括:直线伺服驱动5;
14、所述直线伺服驱动5的输出轴末端设置方形轴结配合构,与驱动杆9上的方形孔对应,用于直线伺服驱动5的输出轴与驱动杆9连接的定位。
15、优选地,所述翼面3上设置有圆弧滑槽12、支撑滑槽13;
16、所述支撑滑槽13为分布于翼面3前后与舱体连接的一种结构;在翼面3与舱体间形成前后两组刚性支撑结构;
17、所述前支撑杆4与后支撑杆10的一端与翼面3上的圆弧滑槽12配合。
18、优选地,所述转轴2上设置有圆锥滚子轴承11;
19、所述圆锥滚子轴承11在转轴2两侧对称分布。
20、优选地,所述前支撑杆4与后支撑杆10均安装有多个方向的轴承。
21、优选地,所述直线伺服驱动5与翼盒1采用螺钉连接,直线伺服驱动5采用电机、液压或者气动驱动形式。
22、优选地,支撑滑槽13与前支撑杆4、后支撑杆10共同支撑翼面3,将翼面3所受载荷分散于翼盒1。
23、优选地,所述前支撑杆4与后支撑杆10构成四连杆机构,四连杆机构将直线驱动转变为绕轴转动,一个驱动单元控制一对翼面3对称运动。
24、与现有技术相比,本发明具有如下的有益效果:
25、(1)本发明采用四连杆机构将直线驱动变绕轴转动,用一个驱动单元控制一对翼面对称运动,可以实现两侧翼面任意角度的展开与锁定,该机构传动效率高,具有较强的承载能力;
26、(2)本发明可以实现除常规翼面的后掠角、轴向位置及机翼上反自由度之外的变形,在整体飞行器翼面面积及气动外形可以有较大合宜变化;
27、(3)本发明采用翼盒结构形式,可以收纳翼面,将翼面展开机构与飞行器舱体隔离,便于飞行器舱内结构的独立设计;
28、(4)本发明采用前后两组辅助支撑杆,同时翼面前后端与前后舱体连接处设计有支撑滑槽,支撑杆及滑槽可以有效分散对翼面的支撑力,避免翼面受集中应力;
29、(5)本发明通过翼面面积改变,从而改变飞行器气动外形,进一步提高承载能力,适用于火箭助推等高速飞行、大过载、强振动的复杂严酷力学工况。
技术特征:1.一种飞行器变形翼机构,其特征在于,包括:翼盒(1)、转轴(2)、翼面(3);
2.根据权利要求1所述的飞行器变形翼机构,其特征在于,所述飞行器变形翼机构还包括:传动杆组件(7);
3.根据权利要求2所述的飞行器变形翼机构,其特征在于,所述飞行器变形翼机构还包括:前支撑杆(4)、传动螺钉(6)、驱动螺钉(8)、驱动杆(9)、后支撑杆(10);
4.根据权利要求3所述的飞行器变形翼机构,其特征在于,所述飞行器翼面变形机构还包括:直线伺服驱动(5);
5.根据权利要求1所述的飞行器变形翼机构,其特征在于,所述翼面(3)上设置有圆弧滑槽(12)、支撑滑槽(13);
6.根据权利要求1所述的飞行器变形翼机构,其特征在于,所述转轴(2)上设置有圆锥滚子轴承(11);
7.根据权利要求3所述的飞行器变形翼机构,其特征在于,所述前支撑杆(4)与后支撑杆(10)均安装有多个方向的轴承。
8.根据权利要求4所述的飞行器翼面变形机构,其特征在于,所述直线伺服驱动(5)与翼盒(1)采用螺钉连接,直线伺服驱动(5)采用电机、液压或者气动驱动形式。
9.根据权利要求5所述的飞行器变形翼机构,其特征在于,支撑滑槽(13)与前支撑杆(4)、后支撑杆(10)共同支撑翼面(3),将翼面(3)所受载荷分散于翼盒(1)。
10.根据权利要求1至3中任一项所述的飞行器翼面变形机构,其特征在于,所述前支撑杆(4)与后支撑杆(10)构成四连杆机构,四连杆机构将直线驱动转变为绕轴转动,一个驱动单元控制一对翼面(3)对称运动。
技术总结本发明提供了一种飞行器变形翼机构,实现了翼身融合飞行器两侧翼面任意角度的展开与锁定,可以根据飞行器的不同飞行高度及速度改变其气动外形,以获得对应工况的最大气动效益。采用四连杆机构将直线驱动变绕轴转动,用一个驱动单元控制一对翼面对称运动。采用翼盒结构形式收纳翼面,将翼面展开机构与飞行器舱体隔离。设计有前后两组辅助支撑杆及翼面前后端的支撑滑槽,共同起辅助支撑翼面的作用。本发明通过翼面面积改变,从而改变飞行器气动外形,进一步提高承载能力,适用于火箭助推等高速飞行、大过载、强振动的复杂严酷力学工况。技术研发人员:华洲,蔡克荣,高波,贾骏恺,武秋生,徐鄂严,马万超,江振,刘广,邹仁珍受保护的技术使用者:上海机电工程研究所技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240722/221135.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表