一种舱外载人机动装置的制作方法
- 国知局
- 2024-08-01 05:47:23
本技术涉及一种舱外载人机动装置,属于宇航。
背景技术:
1、宇航员利用舱外载人机动装置可实现出舱行走、维护维修、服务升级,拓展了宇航员空间活动和工作能力。目前舱外在机机动装置需要全程宇航员操控,对宇航员操作负荷大,存在一定安全风险且行进间无法解放宇航员双手。
技术实现思路
1、本实用新型解决的技术问题是:克服现有技术的不足,提供了一种舱外载人机动装置,解决当前载人机动装置仅具备手动驾驶功能的问题。
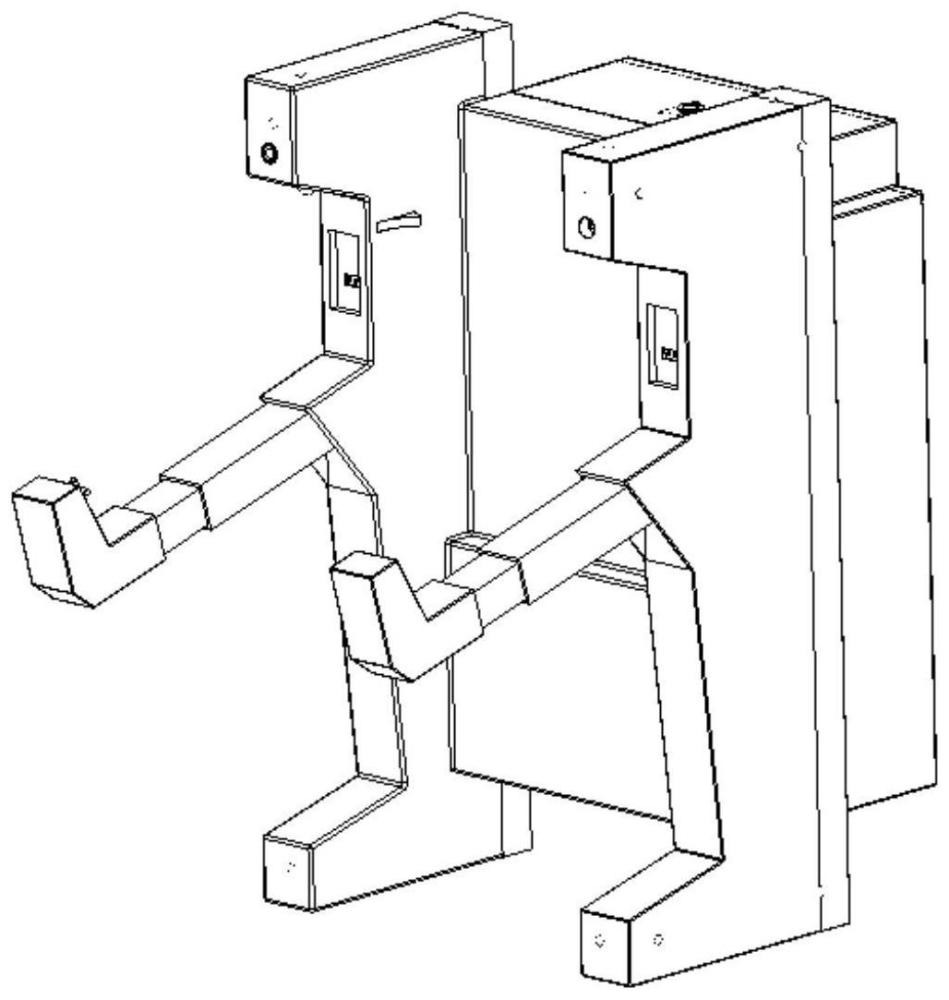
2、本实用新型的技术解决方案是:一种舱外载人机动装置,包括主构板、主构板两侧伸出的连杆以及空间作业功能模块;
3、所述主构板一侧安装航天员生命维持系统;
4、所述连杆安装在所述主构板另一侧,且其末端设有供航天员操作和控制位置和姿态的操纵手柄;
5、所述空间作业功能模块安装在主构板上。
6、进一步地,所述连杆为可伸缩结构。
7、进一步地,所述操纵手柄中的一个为1字型,控制前、后、左、右、上和下六个方向;另一个操纵手柄为十字型,实现俯仰、偏航和滚转三个通道的控制。
8、进一步地,所述空间作业功能模块包括推进系统、接口、开关、指示灯以及导航设备。
9、进一步地,所述推进系统包括为推进器提供推进剂的气瓶和在主构板上均匀布局的推进器;所述推力器的布局满足:避开航天员四肢和头部的活动区域、每个推进器都关于质心对称分布以及执行控制力矩的每对推力器在整体包络之下力臂最大。
10、进一步地,所述推力器选择布置在舱外载人机动装置包络的八个顶点,共布置24个推力器,分布在同一个舱外载人机动装置包络顶点的三个推力器为一组,共用一个管路。
11、进一步地,所述推进系统包括两套相互独立的系统,每套推进系统分别包括四组共12个推力器,每套推进系统由对应的气瓶提供氮气;两套系统之间设有带开关阀门的管路;每组的三个推力器共用一套过滤器、稳压器和安全阀,三个推力器相互正交,推力矢量通过一点;安装在舱外载人机动装置内壁,喷口外沿与舱外载人机动装置外壁平齐。
12、进一步地,所述接口、开关、指示灯以及导航设备暴露在主构板外表面。
13、进一步地,全展开状态下的舱外载人机动装置的尺寸为1.25×0.75×1.21(m×m×m),收拢状态下尺寸为1.25×0.75×0.70(m×m×m)。
14、进一步地,收拢状态下总包络包括直径不大于1m的截面,总重不大于100kg。
15、本实用新型与现有技术相比的优点在于:
16、(1)本实用新型通过可折叠伸缩操作杆设计,实现了mmu存储以及出舱使用的不同状态,一方面优化存储空间,另一方面宇航员出舱使用;
17、(2)本实用新型通过跟瞄设备优化布局,实现了舱外载人机动装置前后向均具备相对测量能力,使机动装置具备了遇险规避以及自主机动的能力;
18、(3)本实用新型通过全向发动机布局方式,实现了宇航员6自由度飞行,同时可使mmu一次发动机故障不影响使用,两次故障发动机具备降级使用能力。
技术特征:1.一种舱外载人机动装置,其特征在于,包括主构板、主构板两侧伸出的连杆以及空间作业功能模块;
2.根据权利要求1所述的一种舱外载人机动装置,其特征在于,所述连杆为可伸缩结构。
3.根据权利要求1所述的一种舱外载人机动装置,其特征在于,所述操纵手柄中的一个为1字型,控制前、后、左、右、上和下六个方向;另一个操纵手柄为十字型,实现俯仰、偏航和滚转三个通道的控制。
4.根据权利要求1所述的一种舱外载人机动装置,其特征在于,所述空间作业功能模块包括推进系统、接口、开关、指示灯以及导航设备。
5.根据权利要求4所述的一种舱外载人机动装置,其特征在于,所述推进系统包括为推进器提供推进剂的气瓶和在主构板上均匀布局的推力器;所述推力器的布局满足:避开航天员四肢和头部的活动区域、每个推进器都关于质心对称分布以及执行控制力矩的每对推力器在整体包络之下力臂最大。
6.根据权利要求5所述的一种舱外载人机动装置,其特征在于,所述推力器选择布置在舱外载人机动装置包络的八个顶点,共布置24个推力器,分布在同一个舱外载人机动装置包络顶点的三个推力器为一组,共用一个管路。
7.根据权利要求6所述的一种舱外载人机动装置,其特征在于,所述推进系统包括两套相互独立的系统,每套推进系统分别包括四组共12个推力器,每套推进系统由对应的气瓶提供氮气;两套系统之间设有带开关阀门的管路;每组的三个推力器共用一套过滤器、稳压器和安全阀,三个推力器相互正交,推力矢量通过一点;安装在舱外载人机动装置内壁,喷口外沿与舱外载人机动装置外壁平齐。
8.根据权利要求4所述的一种舱外载人机动装置,其特征在于,所述接口、开关、指示灯以及导航设备暴露在主构板外表面。
9.根据权利要求1所述的一种舱外载人机动装置,其特征在于,全展开状态下的舱外载人机动装置的尺寸为1.25m×0.75m×1.21m,收拢状态下尺寸为1.25m×0.75m×0.70m。
10.根据权利要求9所述的一种舱外载人机动装置,其特征在于,收拢状态下总包络包括直径不大于1m的截面,总重不大于100kg。
技术总结一种舱外载人机动装置,适用于航天员出舱活动。本发明包括主构板、主构板两侧伸出的连杆以及空间作业功能模块;所述主构板一侧安装航天员生命维持系统;所述连杆安装在所述主构板另一侧,且其末端设有供航天员操作和控制位置和姿态的操纵手柄;所述空间作业功能模块安装在主构板上。MMU一个可由单人操作的背包式喷气机动装置,可支持宇航员离开航天器,自由在空间活动。本技术设计考虑人体工效学,方便宇航员操作,整体设计与布局考虑了导航相机以及发动机的布局。提高了航天员在舱外活动的安全性、舒适性、活动范围以及舱外工作效率。技术研发人员:尚逸帆,刘涛,王首喆,马禄创,洪炎,徐焘受保护的技术使用者:上海宇航系统工程研究所技术研发日:20230419技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240722/221430.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表