一种低轨巨型星座组网轨道控制策略方法与流程
- 国知局
- 2024-08-01 05:49:13
本发明涉及低轨巨型星座,更具体地说,涉及一种低轨巨型星座组网轨道控制策略方法。
背景技术:
1、随着航天器技术的应用,涌现出越来越多的由几千颗、甚至几万颗卫星组成的低轨巨型星座。此类星座往往采用一箭多星的发射方式,星箭分离后还需卫星利用携带的电推进进行自主组网,具有批次发射密集、多星轨控任务集中的特点。
2、传统的单星自主入轨策略难以满足现有巨型星座轨控任务需求。
3、前面的叙述在于提供一般的背景信息,并不一定构成现有技术。
技术实现思路
1、本发明的目的在于提供一种低轨巨型星座组网轨道控制策略方法,该策略方法适用于配置电推进的低轨巨型星座组网任务,满足现有巨型星座轨控任务需求。
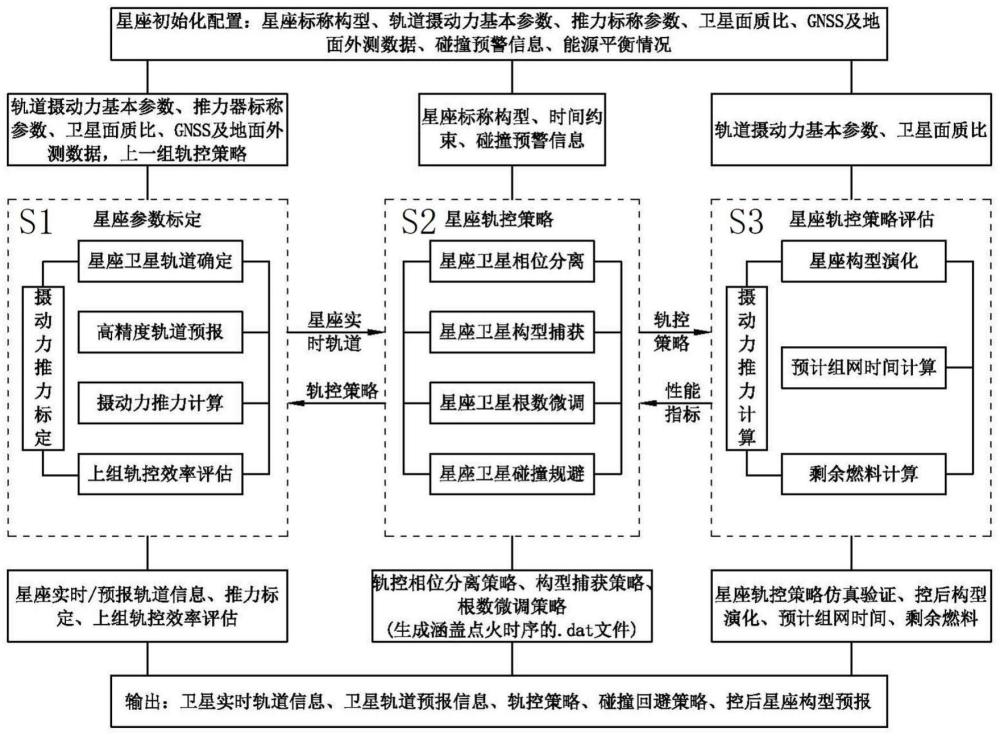
2、本发明提供一种低轨巨型星座组网轨道控制策略方法,包括以下步骤:
3、s1:根据上一组轨控点火时序、gnss遥测及地面测定轨数据进行星座关键参数标定及预报;
4、s2:依据步骤s1中计算的标定结果及标称星座构型参数进行星座组网阶段自主判断,并生成轨控策略;
5、s3:依据步骤s2中生成轨控策略计算未来一段时间的控后星座构型演化情况,验证控制策略。
6、进一步地,所述步骤s1包括:
7、s11:gnss遥测及地面测定轨结果,确定轨控前后轨道根数,半长轴a、离心率e、轨道倾角i、近地点辐角w、升交点赤经ω、真近点角m;
8、s12:依据轨控点火时序及轨控前后轨道根数变化对电推进推力标定;轨道标定法根据轨道变化参数,计算得到卫星的速度增量;根据卫星速度增量及电推进工作时间,计算得到推进系统推力;
9、s13:依据确定轨道结果,对星座构型演化进行计算。
10、进一步地,步骤s12中计算推进系统推力的公式为:
11、
12、tδt=mδv (2)
13、
14、其中,公式(1)中δa为卫星轨道高度变化量,δv为卫星速度增量,r为卫星轨道半径,μ为常数为3.986×1014m3/s2;
15、其中,公式(2)中t为推力,δt为电推进系统工作时间,m为卫星质量,δv为卫星速度增量;根据公式(1)公式(2)可得公式(3);获取轨控前后一段时间内的轨道位置参数,事后精密定轨后得到轨控前后轨道半长轴平根之差,计算可得电推进器系统的实际推力。
16、进一步地,所述步骤s2包括:
17、s21:计算星座构型的平均轨道参数与构型目标根数差值δa、δu、δi及其标准差σa、σδu、σi;计算公式为:
18、
19、
20、式中,ai、ui、ii为星座中第i颗卫星的轨道半长轴的平根数值、平纬度俯角及平倾角,由星座卫星当前的轨道参数提供,n为同批次星座卫星个数,δui为星座中第i颗卫星与相位后侧卫星相位差值。
21、进一步地,所述步骤s2还包括:
22、s22:根据步骤s21计算的平均半长轴差δa、平均相位差判断星座组网任务阶段:
23、若平均半长轴差δa>δa1或平均相位差δu<δu1,则星座组网任务处于相位分离阶段;
24、若平均半长轴差δa2<δa≤δa1,则星座组网任务处于构型粗捕阶段;
25、若平均半长轴差δa≤δa2,则星座组网任务处于根数微调阶段;
26、其中,δa1、δa2、δu1,需具体结合组网任务选择;δa1选取半长轴需改变量的5%,δa2选取半长轴需改变量的95%,δu1选取星座构型标称相位差的10%。
27、进一步地,所述步骤s2还包括:
28、s23:依据步骤s22判断出的星座任务阶段,进一步区分工作正常卫星与工作异常卫星;
29、依据不同阶段任务需求,判断条件如下:
30、相位分离阶段工作正常判断:第i颗星相位差|δui-δu|<3σδu,标注正常星,否则标注异常星;
31、构型粗捕阶段工作正常判断:第i颗星半长轴|δai-δa|<3σa&&相位差δui-δu|<3σδu&&倾角差|δii-δi|<3σi,标注正常星,否则标注异常星;
32、根数微调阶段工作正常判断:第i颗星半长轴|δai-δa|<3σa&&相位差δui-δu|<3σδu&&倾角差|δii-δi|<3σi,标注正常星,否则标注异常星。
33、进一步地,所述步骤s2还包括:
34、s24:依据步骤s22和步骤s23明确的组网任务阶段及轨控任务正常标志进行轨控策略生成:
35、正常星相位分离阶段轨控策略;
36、正常星构型粗捕阶段轨控策略;
37、计算卫星轨控需要的根数增量
38、δa=am-ai;δi=im-ii;
39、对于星座构型粗捕任务,一般为改变半场轴及倾角,可以采用推力方向只在切向、法向存在分量,而在径向无分量,建立基于纬度幅角的控制策略,推力方向与轨道坐标系夹角β随纬度俯角关系如下:
40、β=cos(w+m)βmax;
41、其中,w+m为纬度幅角,βmax为轨控最大摆角;
42、轨控最大摆角按如下迭代方式进行计算:
43、
44、
45、其中,fr、fn、ft为推力在径向、法向、切向分量,f为推进系统推力模值,n为当圈轨道角速度
46、
47、
48、通过仿真迭代,计算得出最大摆角βmax,星上自主依据最大摆角进行轨控任务;
49、正常星根数微调阶段轨控策略;
50、异常星轨控策略:考虑轨控可行性,当出现推进系统异常或整星其他故障导致某星出现轨控任务滞后的现象,防止因轨道根数不一致导致根数差异持续扩大,通过偏置轨道倾角方式,避免升交点赤经发散。
51、进一步地,所述步骤s3包括:
52、星座轨控评估模块利用matlab-stk联合仿真评估星座轨控过程,根数演变情况,验证轨控策略正确性。
53、本发明提供的低轨巨型星座组网轨道控制策略方法,以巨型星座自主组网为目标,设计了涵盖星座参数标定、星座轨控策略及星座轨控策略评估模块的星座组网策略自动生成算法;首先,通过推力器标称参数、gnss及地面外测数据、轨道摄动力基本参数、卫星面质比及上一组轨控策略完成星座参数的高精度标定;然后,利用标称星座构型与轨道确定结果,算法自主判断星座所处的组网任务阶段,并结合各星轨控进度不同情况,划分异常星与正常星两种分类,分别制定不同的轨控策略;最后,通过与matlab-stk联合仿真,验证策略正确性,并对剩余燃料、组网时长、星座构型演化情况进行评估;适用于配置电推进的低轨巨型星座组网任务,满足现有巨型星座轨控任务需求。
技术特征:1.一种低轨巨型星座组网轨道控制策略方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的低轨巨型星座组网轨道控制策略方法,其特征在于,所述步骤s1包括:
3.根据权利要求2所述的低轨巨型星座组网轨道控制策略方法,其特征在于,步骤s12中计算推进系统推力的公式为:
4.根据权利要求1所述的低轨巨型星座组网轨道控制策略方法,其特征在于,所述步骤s2包括:
5.根据权利要求4所述的低轨巨型星座组网轨道控制策略方法,其特征在于,所述步骤s2还包括:
6.根据权利要求5所述的低轨巨型星座组网轨道控制策略方法,其特征在于,所述步骤s2还包括:
7.根据权利要求6所述的低轨巨型星座组网轨道控制策略方法,其特征在于,所述步骤s2还包括:
8.根据权利要求1所述的低轨巨型星座组网轨道控制策略方法,其特征在于,所述步骤s3包括:
技术总结本发明涉及一种低轨巨型星座组网轨道控制策略方法,包括以下步骤:S1:根据上一组轨控点火时序、GNSS遥测及地面测定轨数据进行星座关键参数标定及预报;S2:依据步骤S1中计算的标定结果及标称星座构型参数进行星座组网阶段自主判断,并生成轨控策略;S3:依据步骤S2中生成轨控策略计算未来一段时间的控后星座构型演化情况,验证控制策略。优点在于:适用于配置电推进的低轨巨型星座组网任务,满足现有巨型星座轨控任务需求。技术研发人员:姜松,侯佳睿,陈夏,黄佳受保护的技术使用者:上海格思航天科技有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240722/221561.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。