一种高精度中波制冷双光吊舱装置的制作方法
- 国知局
- 2024-08-01 05:49:36
本发明属于光电探测,具体涉及一种高精度中波制冷双光吊舱装置。
背景技术:
1、目前,随着信息技术和空间技术的发展,机载光电探测因其广阔的探测视野、便捷的操作方式而广泛应用军事侦查、目标探测、数据采集等领域。
2、然而,传统的机载光电设备通常采单红外进行探测,单红外探测容易出现误识别,单可见光探测不能进行夜间探测,定焦探测视场角有限无法探测远距离或近距离的目标,非制冷红外探测器的探测距离有限,不具备陀螺稳像或者是稳像精度不高从而影响探测效果,或者体积过大重量过重,而不得不选择更大无人机从而增加成本。
技术实现思路
1、本发明的目的是提供一种高精度中波制冷双光吊舱装置,以解决探测距离有限、稳像精度不高从而影响探测效果的问题。
2、为实现上述目的,本发明采用如下技术方案:
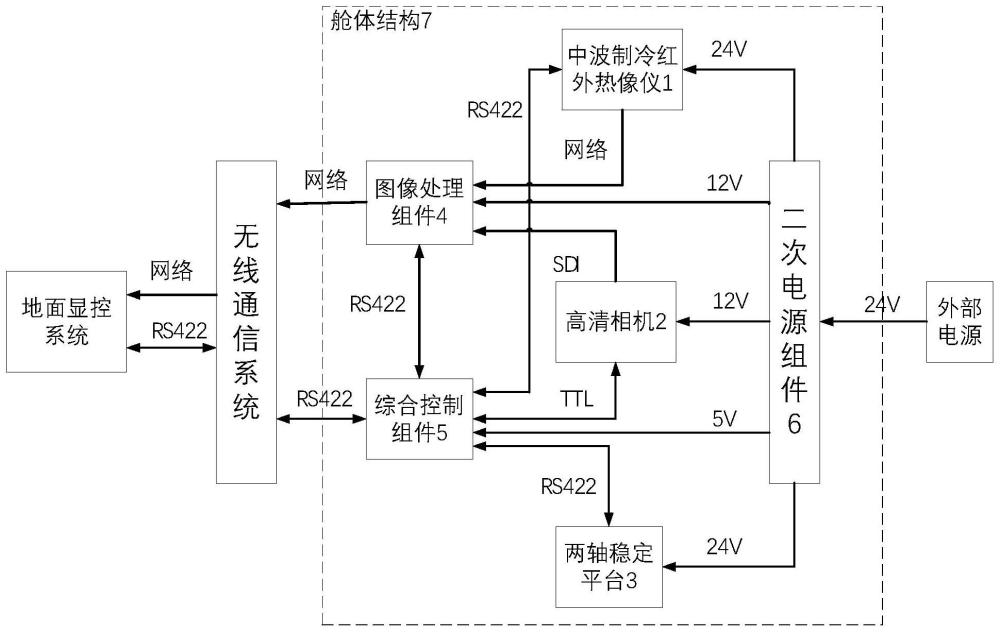
3、一种高精度中波制冷双光吊舱装置,包括两轴稳定平台、舱体、中波制冷红外热像仪、高清相机、图像处理组件和综合控制组件,所述舱体设置于所述两轴稳定平台上,且所述两轴稳定平台将所述舱体的侧面束缚,所述中波制冷红外热像仪和所述高清相机的一部分结构设置于所述舱体内,所述中波制冷红外热像仪和所述高清相机的另一部分结构分别伸出所述舱体以实现对目标的探测和拍照,所述图像处理组件、所述综合控制组件分别设置于所述舱体内,所述图像处理组件分别与所述中波制冷红外热像仪、所述高清相机和所述综合控制组件连接,所述综合控制组件分别与所述两轴稳定平台、所述中波制冷红外热像仪和所述高清相机连接。
4、可选的,所述两轴稳定平台包括控制电路、方位框架、俯仰框架以及陀螺仪,所述俯仰框架包裹所述舱体的部分侧面以使所述舱体随所述俯仰框架和所述方位框架平稳运动,所述方位框架设置于所述俯仰框架上,所述控制电路和所述陀螺仪安装在所述舱体内部上,所述控制电路分别与所述方位框架、所述俯仰框架以及所述陀螺仪连接,所述陀螺仪分别与方位框架和所述俯仰框架连接,所述综合控制组件与所述控制电路连接以控制所述方位框架、所述俯仰框架以及所述陀螺仪运行。
5、可选的,所述方位框架上的轴转动范围为360度连续转动,所述俯仰框架上的轴转动范围为-120°~90°,所述俯仰框架上的轴转动最大角速度不小于90°/s,所述俯仰框架上的轴转动最大角加速度不小于100°/s2,且所述陀螺仪的稳定精度为不大于0.2mrad。
6、可选的,所述中波制冷红外热像仪包括探测器和光学系统,所述探测器和所述光学系统连接,所述光学系统设置于所述舱体内部,所述探测器的探测头伸出舱体外以对目标进行探测,所述光学系统分别与所述综合控制组件和所述图像处理组件连接。
7、可选的,所述探测器类型为制冷型探测器,所述探测器的感光材料为锑镉汞,所述探测器的探测波段为3um~5um,所述探测器的分辨率为640×512,所述探测器的像元尺寸为15μm,探测帧频为50hz。
8、可选的,所述光学系统的f数为f4.0,所述光学系统的焦距为25mm~250mm,可连续变焦,所述光学系统的视场角为2.2°~29.8°。
9、可选的,所述舱体包括包络壳和承载件,所述承载件设置于所述包络壳内,所述承载件用于所述中波制冷红外热像仪、所述高清相机、所述图像处理组件和所述综合控制组件,在所述包络壳上设有第一安装孔和第二安装孔,所述第一安装孔安装所述中波制冷红外热像仪的头部,所述第二安装孔安装所述高清相机的头部,所述两轴稳定平台包裹所述包络壳。
10、可选的,还包括二次电源组件,所述二次电源组件分别与所述两轴稳定平台、所述中波制冷红外热像仪、所述高清相机、所述图像处理组件和所述综合控制组件连接。
11、可选的,所述高清相机的类型为cmos,所述高清相机的分辨率为1920×1080,所述高清相机的焦距为4.3mm~129mm,可连续变焦,所述高清相机的视场角为63.7°~2.3°。
12、可选的,所述图像处理组件用于接收红外与可见光图像,进行图像解析与编码,同时可以对图像中的目标进行识别与跟踪,且所述图像处理组件与外界地面显控系统通过无线通信系统连接;
13、所述综合控制组件用于将所述舱体的外部与所述舱体的内部的通信,并解析外部指令转发至所述中波制冷红外热像仪、所述高清相机、所述两轴稳定平台所述以及所述图像处理组件,再将以所述中波制冷红外热像仪、所述高清相机、所述两轴稳定平台所述以及所述图像处理组件的状态反馈信息汇总发送至所述舱体的外部,所述综合控制组件与外界地面显控系统通过无线通信系统连接。
14、本申请通过中波制冷红外热像仪和高清相机的存在使得探测距离延长,在高精度的两轴稳定平台完成光电载荷光轴稳定和光轴运动的驱动,从而保证舱体在机载环境下获取稳定清晰的图像,使得稳像精度提高从而不会影响探测效果的,图像处理组件对目标进行识别并将目标脱靶量发送给两轴稳定平台从而完成目标的跟踪。
技术特征:1.一种高精度中波制冷双光吊舱装置,其特征在于,包括:两轴稳定平台、舱体、中波制冷红外热像仪、高清相机、图像处理组件和综合控制组件,所述舱体设置于所述两轴稳定平台上,且所述两轴稳定平台将所述舱体的侧面束缚,所述中波制冷红外热像仪和所述高清相机的一部分结构设置于所述舱体内,所述中波制冷红外热像仪和所述高清相机的另一部分结构分别伸出所述舱体以实现对目标的探测和拍照,所述图像处理组件、所述综合控制组件分别设置于所述舱体内,所述图像处理组件分别与所述中波制冷红外热像仪、所述高清相机和所述综合控制组件连接,所述综合控制组件分别与所述两轴稳定平台、所述中波制冷红外热像仪和所述高清相机连接。
2.如权利要求1所述的高精度中波制冷双光吊舱装置,其特征在于,所述两轴稳定平台包括控制电路、方位框架、俯仰框架以及陀螺仪,所述俯仰框架包裹所述舱体的部分侧面以使所述舱体随所述俯仰框架和所述方位框架平稳运动,所述方位框架设置于所述俯仰框架上,所述控制电路和所述陀螺仪安装在所述舱体内部上,所述控制电路分别与所述方位框架、所述俯仰框架以及所述陀螺仪连接,所述陀螺仪分别与方位框架和所述俯仰框架连接,所述综合控制组件与所述控制电路连接以控制所述方位框架、所述俯仰框架以及所述陀螺仪运行。
3.如权利要求2所述的高精度中波制冷双光吊舱装置,其特征在于,所述方位框架上的轴转动范围为360度连续转动,所述俯仰框架上的轴转动范围为-120°~90°,所述俯仰框架上的轴转动最大角速度不小于90°/s,所述俯仰框架上的轴转动最大角加速度不小于100°/s2,且所述陀螺仪的稳定精度为不大于0.2mrad。
4.如权利要求2所述的高精度中波制冷双光吊舱装置,其特征在于,所述中波制冷红外热像仪包括探测器和光学系统,所述探测器和所述光学系统连接,所述光学系统设置于所述舱体内部,所述探测器的探测头伸出舱体外以对目标进行探测,所述光学系统分别与所述综合控制组件和所述图像处理组件连接。
5.如权利要求4所述的高精度中波制冷双光吊舱装置,其特征在于,所述探测器类型为制冷型探测器,所述探测器的感光材料为锑镉汞,所述探测器的探测波段为3um~5um,所述探测器的分辨率为640×512,所述探测器的像元尺寸为15μm,探测帧频为50hz。
6.如权利要求4所述的高精度中波制冷双光吊舱装置,其特征在于,所述光学系统的f数为f4.0,所述光学系统的焦距为25mm~250mm,可连续变焦,所述光学系统的视场角为2.2°~29.8°。
7.如权利要求1所述的高精度中波制冷双光吊舱装置,其特征在于,所述舱体包括包络壳和承载件,所述承载件设置于所述包络壳内,所述承载件用于所述中波制冷红外热像仪、所述高清相机、所述图像处理组件和所述综合控制组件,在所述包络壳上设有第一安装孔和第二安装孔,所述第一安装孔安装所述中波制冷红外热像仪的头部,所述第二安装孔安装所述高清相机的头部,所述两轴稳定平台包裹所述包络壳。
8.如权利要求1所述的高精度中波制冷双光吊舱装置,其特征在于,还包括二次电源组件,所述二次电源组件分别与所述两轴稳定平台、所述中波制冷红外热像仪、所述高清相机、所述图像处理组件和所述综合控制组件连接。
9.如权利要求1所述的高精度中波制冷双光吊舱装置,其特征在于,所述高清相机的类型为cmos,所述高清相机的分辨率为1920×1080,所述高清相机的焦距为4.3mm~129mm,可连续变焦,所述高清相机的视场角为63.7°~2.3°。
10.如权利要求1所述的高精度中波制冷双光吊舱装置,其特征在于,所述图像处理组件用于接收红外与可见光图像,进行图像解析与编码,同时可以对图像中的目标进行识别与跟踪,且所述图像处理组件与外界地面显控系统通过无线通信系统连接;
技术总结本发明公开了一种高精度中波制冷双光吊舱装置,包括,中波制冷红外热像仪和高清相机的存在使得探测距离延长,在高精度的两轴稳定平台完成光电载荷光轴稳定和光轴运动的驱动,从而保证舱体在机载环境下获取稳定清晰的图像,使得稳像精度提高从而不会影响探测效果的,图像处理组件对目标进行识别并将目标脱靶量发送给两轴稳定平台从而完成目标的跟踪。技术研发人员:陈科威,王云,吴佳淇,陈同发受保护的技术使用者:北京遥感设备研究所技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240722/221600.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表