一种混合动力双机身倾转螺旋桨垂直起降高速飞行器及方法
- 国知局
- 2024-08-01 05:56:50
本发明涉及航空飞行器,具体为一种混合动力双机身倾转螺旋桨垂直起降高速飞行器及方法。
背景技术:
1、可垂直起降高速飞行器不仅具备直升机垂直起降能力,能以固定翼飞机飞行方式进行巡航飞行,并且飞行速度大于同级别的直升机。随着电驱动技术的发展,目前垂直起降高速飞行器主要采用两种驱动形式:
2、一种为组合动力式,一组电驱动螺旋桨提供垂直起降升力并进行此阶段的姿态控制,另一组驱动装置驱动飞行器进行固定翼模式飞行。垂直起降和巡航飞行采用两组独立的动力系统,不同飞行模式之间的飞行控制相对简单,但垂直起降动力系统在巡航阶段完全不发挥作用,变为结构“死重”,增加了飞行器空机重量,影响了载荷能力及续航时间。
3、一种为倾转动力式,相比组合动力式,其垂直起降动力全部或部分可倾转,在固定翼模式飞行阶段提供驱动力。动力倾转消除或部分消除了巡航飞行阶段不发挥作用的“死重”,但飞行控制相对复杂,倾转机构也增加了全系统的复杂度。
4、受限于电池技术,电驱动所用电池能量密度低、重量重、体积大,目前纯电动的垂直起降高速飞行器续航时间较短,影响了其使用效能。而类似美国v-22“鱼鹰”这样的采用燃油动力的倾转旋翼机,也存在着传动系统复杂,飞行控制难度高,可靠性差等问题。因此,如何在保持电驱动垂直起降高速飞行器飞行控制难度低的同时,有效提升飞行器续航时间以及载荷能力,是垂直起降高速飞行器类飞行器的设计难点。
技术实现思路
1、为解决垂直起降高速飞行器飞行控制难度高、续航时间短及载荷能力低的问题,本发明提供一种混合动力双机身倾转螺旋桨垂直起降高速飞行器及方法。
2、本发明的技术方案为:
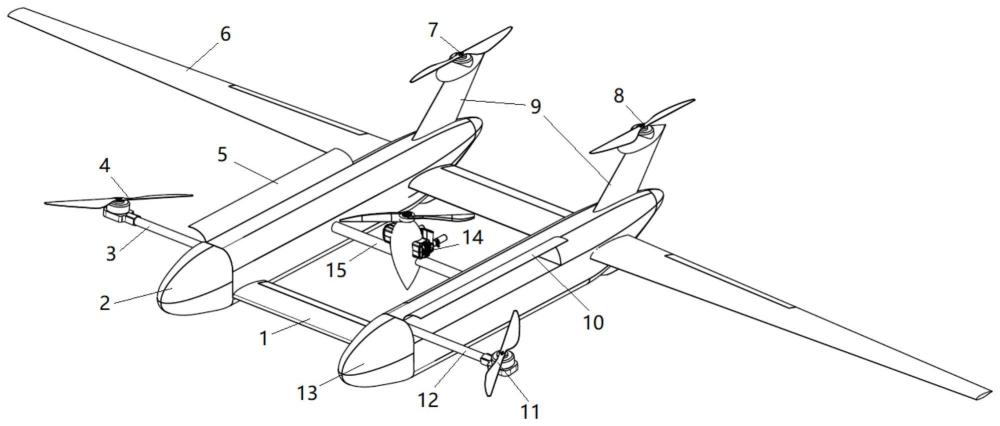
3、一种混合动力双机身倾转螺旋桨垂直起降高速飞行器,其特殊之处在于,包括机身、鸭翼、主机翼、倾转组件、折展组件、电动系统、油动系统和垂尾;
4、所述机身为双机身,平行对称设置;
5、所述鸭翼位于机身头部,鸭翼两端分别与两侧机身连接;所述鸭翼后侧设有升降舵;
6、所述机身尾部上表面设有垂尾,且两个垂尾相对于全机对称平面对称布置,垂尾向机身尾端方向倾斜;所述垂尾后端设有方向舵;
7、所述主机翼靠近垂尾设置,主机翼穿过两个机身且相对于机身轴线对称设置;所述主机翼位于机身内侧部分后端设有升降舵,位于机身外侧部分后端设有副翼;
8、所述油动系统设置在鸭翼和主机翼之间中心位置,用于提供飞行器垂直起降和巡航飞行时的拉力;所述油动系统通过倾转组件与两侧机身连接,使得所述油动系统绕轴向前会或向上倾转,在垂直起降阶段油动系统的螺旋桨下洗气流不流过任何固定翼面,以减小油动系统螺旋桨下洗气流与固定翼面之间的气动干扰,使得飞行器从垂直起降到高速前飞平稳过渡;
9、所述电动系统包括多个电驱动螺旋桨,分别设置在垂尾顶部和机身头部外侧,能够在飞行器垂直起降和低速前飞时提供拉力并进行姿态调整;位于机身同侧的电驱动螺旋桨旋转方向相同,异侧旋转方向相反;
10、所述机身外侧壁设有开口,位于机身头部外侧的两个电驱动螺旋桨通过折展组件与机身转动连接,能够在折展组件驱动作用下沿机身所在平面折叠或伸展,折叠后电驱动螺旋桨及折展组件通过所述开口沿机身纵向位于机身舱体内,展开后电驱动螺旋桨对称位于机身外侧,提供垂直起降拉力和滚转控制力臂。
11、进一步的,所述油动系统包括活塞发动机,及与所述活塞发动机配套的螺旋桨;
12、所述倾转组件包括倾转轴,所述倾转轴两端分别转动连接在两个机身内侧;
13、所述活塞发动机安装在倾转轴中部,在倾转轴的带动下,所述活塞发动机能够向上倾转至其动力输出轴竖直向上,或向前倾转至其动力输出轴平行于机身水平向前。
14、进一步的,所述主机翼为大展弦比机翼;所述主机翼位于机身内侧部分的截面为矩形,位于机身外侧部分的截面为梯形。
15、进一步的,所述机身头部为卵形,中间段截面为矩形,尾部收缩形成尾椎,在飞行时能够减小飞行阻力。
16、进一步的,所述开口处设有口盖,所述口盖上方与机身转动连接,能够在所述折展组件折叠所述电驱动螺旋桨时打开,在所述折展组件和电驱动螺旋桨沿机身纵向位于所述开口内后,关闭所述开口,将折展组件和电驱动螺旋桨包裹在机身内;并能够在需要展开电驱动螺旋桨时,打开所述开口。
17、进一步的,所述折展组件包括支杆和旋转轴,所述旋转轴位于机身头部内,所述支杆一端与旋转轴转动连接,另一端固定安装电驱动螺旋桨。
18、进一步的,所述支杆能够绕其自身轴线向前或向后偏转设定角度,以在飞行器垂直起降阶段提供一定偏航控制力。
19、一种混合动力双机身倾转螺旋桨垂直起降高速飞行器飞行控制方法,其特殊之处在于,包括以下步骤:
20、步骤1,起飞前,位于机身头部的两个电驱动螺旋桨在折展组件带动下展开,直至与机身侧壁垂直;油动系统在倾转组件作用下向上倾转,直至其动力输出轴垂直地面向上;
21、步骤2,起飞时,四个电驱动螺旋桨和油动系统高速运转,产生向上的拉力驱动飞行器垂直起飞,并进行姿态调整;所述姿态调整过程具体包括以下子步骤:
22、子步骤2.1,差动调节位于机身头部和尾部的电驱动螺旋桨的转速,形成拉力差及绕重心的俯仰力矩,进行飞行器的俯仰控制;
23、子步骤2.2,差动调节位于机身头部两侧的电驱动螺旋桨的转速,形成拉力差及绕重心的滚转力矩,进行飞行器的滚转控制;
24、子步骤2.3,折展组件绕其轴线差动偏转,使位于机身头部两侧的电驱动螺旋桨的拉力形成水平分力,进行飞行器的偏航控制;
25、步骤3,当飞行器离地到达安全高度后,油动系统向前倾转,形成向前的水平拉力,飞行器开始向前飞行;
26、步骤4,在低速前飞阶段,调节四个电驱动螺旋桨的拉力和偏转进行飞行器姿态控制;
27、所述油动系统持续向前倾转,直至飞行器前飞速度达到预定转换速度,当油动系统倾转至其动力输出轴水平向前时,油动系统完全提供飞行器水平飞行的拉力;
28、所述转换速度为在根据飞行高度下设定的飞行速度,在该飞行速度下,所述鸭翼和主机翼能够产生飞行器可控飞行所需的全部升力和控制力;
29、步骤5,在高速前飞阶段,四个电驱动螺旋桨停止转动,位于机身头部的两个电驱动螺旋桨向后折叠收起;
30、通过鸭翼和主机翼翼面进行飞机姿态控制;
31、步骤6,在飞行器降落阶段,先降低飞行高度,并使飞行速度降低至设定转换速度;然后打开机身口盖,折展组件带动两个电驱动螺旋桨展开,启动四个电驱动螺旋桨旋转;
32、油动系统在倾转组件作用下向上倾转,当倾转至其动力输出轴竖直向上且飞行速度为零时,调节电驱动螺旋桨和油动系统,控制飞行器缓慢降落;
33、同时按照步骤2姿态调整过程,进行飞行器的姿态控制。
34、本发明的有益效果是:
35、1、本发明在垂直起降阶段由电驱动螺旋桨和活塞发动机一同提供所需拉力,相比于现有组合动力式高速飞行器,电驱动功率需求减少,电机等电驱动系统重量减轻,所需电池减少,同时通过采用双机身布局、大展弦比机翼结构,有效提升了载荷空间和载荷能力。
36、本发明在垂直起降阶段主要通过靠近机身头部和尾部布置的四个电驱动螺旋桨进行姿态控制,具备机构简单、控制难度低等优点。
37、本发明在飞行器固定翼巡航飞行阶段,通过油动活塞发动机驱动,有效提高了续航时间。
38、2、本发明中活塞发动机通过倾转轴布置在左右机身之间,在垂直起降阶段螺旋桨下洗气流不流过任何固定翼面,没有遮挡,提高了全机的悬停效率,减小了螺旋桨下洗气流与固定翼面之间的气动干扰,实现了飞行器从垂直起降到高速前飞的平稳过渡,减小了转换飞行控制难度。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222071.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表